Download presentation
Presentation is loading. Please wait.

1
Computed Tomography II
Detectors and detector arrays Details of acquisition Tomographic reconstruction

2
Detectors Xenon detectors Solid-state detectors
Multiple detector arrays

3
Xenon detectors Use high-pressure (about 25 atm) nonradioactive xenon gas, in long thin cells between two metal plates Very thick (e.g., 6 cm) to compensate in part for relatively low density Thin metal septa separating individual detectors improves geometric efficiency by reducing dead space between detectors
 to compensate in part for relatively low density. Thin metal septa separating individual detectors improves geometric efficiency by reducing dead space between detectors.")
5
Xenon detectors (cont.)
Long, thin plates are highly directional Must be positioned in a fixed orientation with respect to the x-ray source Cannot be used for 4th generation scanners because those detectors must record x-rays as the source moves over a wide angle

6
Solid-state detectors
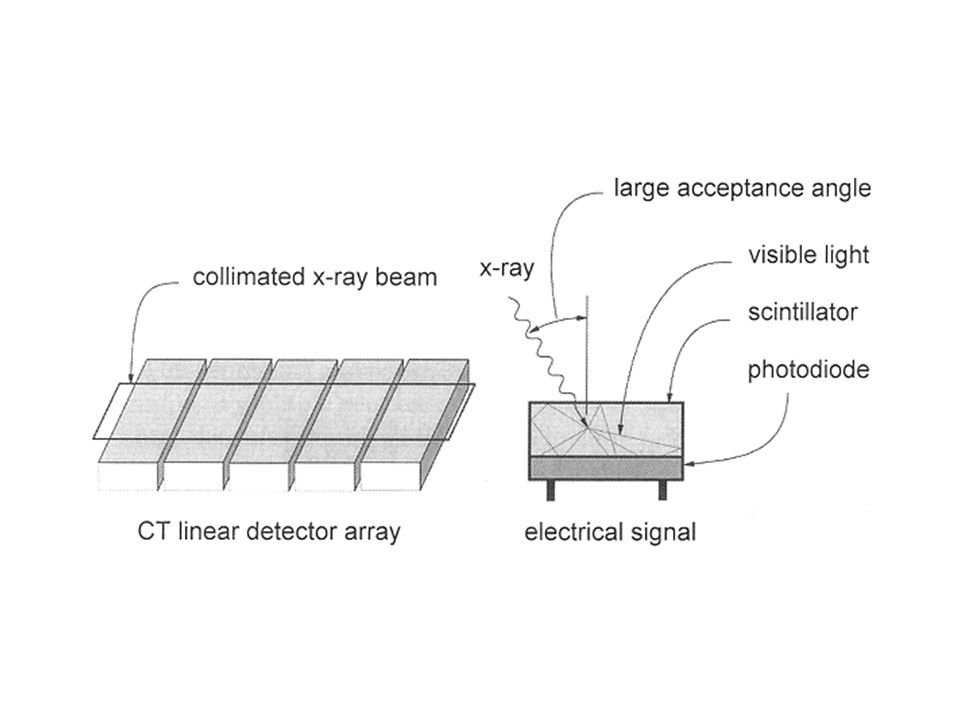
Composed of a scintillator coupled tightly to a photodetector (typically a photodiode) Scintillator emits visible light when an x-ray is absorbed, similar to an x-ray intensifying screen Photodetector converts light intensity into an electrical signal proportional to the light intensity
 Scintillator emits visible light when an x-ray is absorbed, similar to an x-ray intensifying screen. Photodetector converts light intensity into an electrical signal proportional to the light intensity.")
8
Solid-state detectors (cont.)
Detector size typically 1.0 x 15 mm (or 1.0 x 1.5 mm for multiple detector arrays) Scintillators used include CdWO4 and yttrium and gadolinium ceramics Better absorption efficiency than gas detectors because of higher density and higher effective atomic number
 Scintillators used include CdWO4 and yttrium and gadolinium ceramics. Better absorption efficiency than gas detectors because of higher density and higher effective atomic number.")
9
Solid-state detectors (cont.)
To reduce crosstalk between adjacent detector elements, a small gap between detector elements is necessary, reducing geometric efficiency somewhat Top surface of detector is essentially flat and therefore capable of x-ray detection over a wide range of angles Required for 4th generation scanners and used in most high-tier 3rd generation scanners as well

10
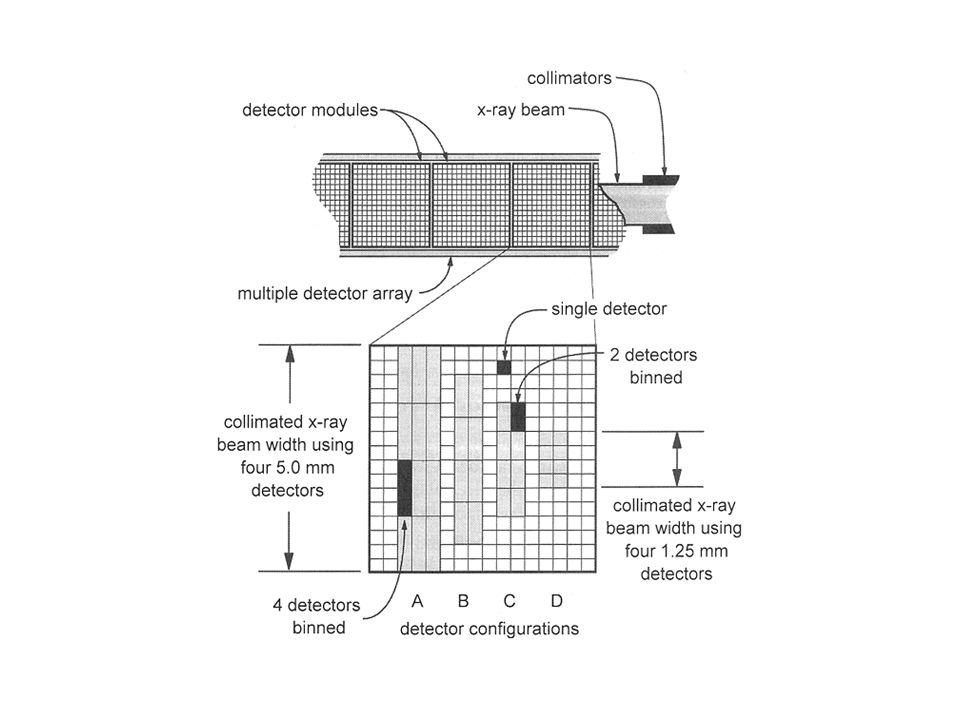
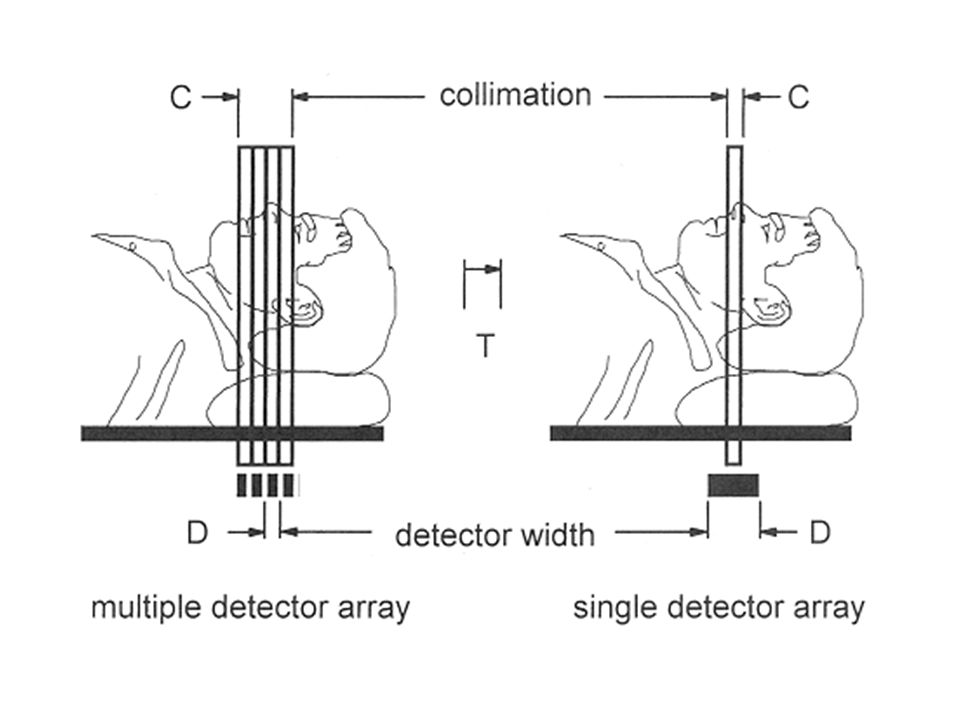
Multiple detector arrays
Set of several linear detector arrays, tightly abutted Use solid-state detector arrays Slice width is determined by the detectors, not by the collimator (although collimator does limit the beam to the total slice thickness)
")
12
Multiple detector arrays (cont.)
3rd generation multiple detector array with 16 detectors in the slice thickness dimension and 750 detectors along each array uses 12,000 individual detector elements 4th generation scanner would require roughly 6 times as many detector elements; consequently currently planned systems use 3rd generation geometry

13
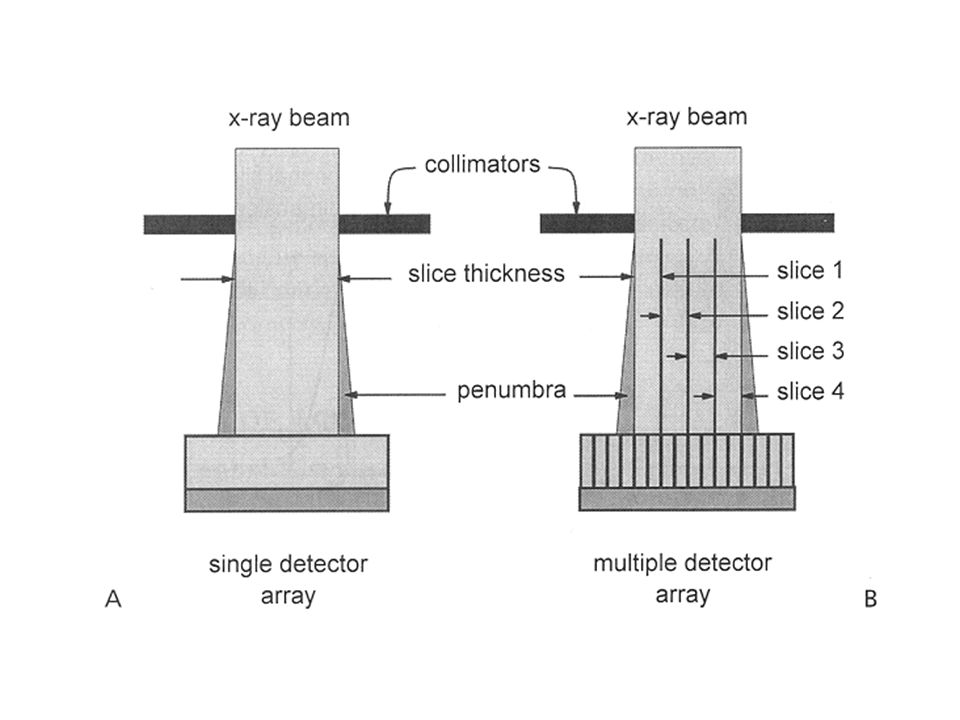
Slice thickness: single detector array scanners
Determined by the physical collimation of the incident x-ray beam with two lead jaws Width of the detectors places an upper limit on slice thickness For scans performed at the same kV and mAs, the number of detected x-ray photons increases linearly with slice thickness Larger slice thicknesses yield better contrast resolution (higher SNR), but the spatial resolution in the slice thickness dimension is reduced
, but the spatial resolution in the slice thickness dimension is reduced.")
14
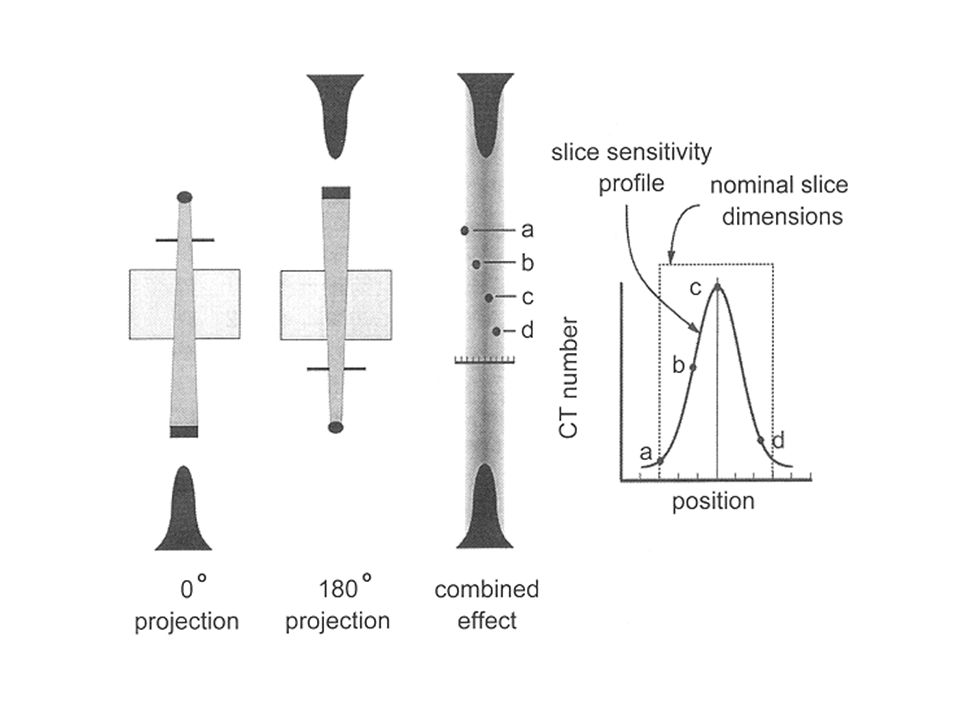
Slice sensitivity profile
For single detector array scanners, the shape of the slice sensitivity profile is a consequence of: Finite width of the x-ray focal spot Penumbra of the collimator The fact that the image is computed from a number of projection angles encircling the patient Other minor factors Helical scans have a slightly broader slice sensitivity profile due to translation of the patient during the scan

16
Slice thickness: multiple detector array scanners
In axial scanning (i.e., with no table movement) where, for example, four detector arrays are used, the width of the two center detector arrays almost completely dictates the thickness of the slices For the two slices at the edges of the scan, the inner side of the slice is determined by the edge of the detector, but the outer edge is determined either by the outer edge of the detector or by the collimator penumbra, depending on collimator adjustment
 where, for example, four detector arrays are used, the width of the two center detector arrays almost completely dictates the thickness of the slices. For the two slices at the edges of the scan, the inner side of the slice is determined by the edge of the detector, but the outer edge is determined either by the outer edge of the detector or by the collimator penumbra, depending on collimator adjustment.")
18
Slice thickness: MDA (cont.)
In helical mode, each detector array contributes to every reconstructed image Slice sensitivity profile for each detector array needs to be similar to reduce artifacts Typical to adjust the collimation so that the focal spot – collimator blade penumbra falls outside the edge detectors Causes radiation dose to be a bit higher (especially for small slice widths) Reduces artifacts by equalizing the slice sensitivity profiles between the detector arrays
 Reduces artifacts by equalizing the slice sensitivity profiles between the detector arrays.")
19
Detector pitch/collimator pitch
Pitch is a parameter that comes into play when helical scan protocols are used In a helical scanner with one detector array, the pitch is determined by the collimator Collimator pitch = table movement (mm) per 360-degree rotation of gantry / collimator width (mm) at isocenter Pitch may range from 0.75 (overscanning) to 1.5 (faster scan time, possibly smaller volume of contrast agent)
 per 360-degree rotation of gantry / collimator width (mm) at isocenter. Pitch may range from 0.75 (overscanning) to 1.5 (faster scan time, possibly smaller volume of contrast agent)")
21
Pitch (cont.) For scanners with multiple detector arrays, collimator pitch is still valid Detector pitch = table movement (mm) per 360-degree rotation of gantry / detector width (mm) For a multiple detector array scanner with N detector arrays, collimator pitch = detector pitch / N For scanners with four detector arrays, detector pitches running from 3 to 6 are used
 per 360-degree rotation of gantry / detector width (mm) For a multiple detector array scanner with N detector arrays, collimator pitch = detector pitch / N. For scanners with four detector arrays, detector pitches running from 3 to 6 are used.")
22
Tomographic reconstruction
Rays and views: the sinogram Preprocessing the data Interpolation (helical)
")
23
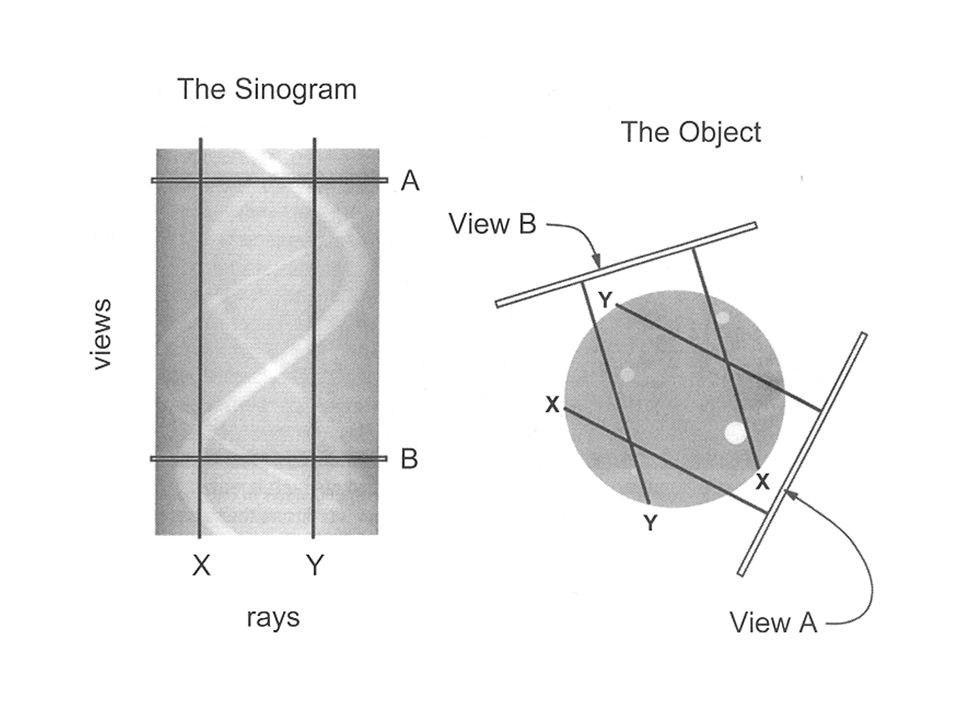
Sinogram Display of raw data acquired for one CT slice before reconstruction Rays are plotted horizontally and views are shown on the vertical axis Objects close to the edge of the FOV produce a sinusoid of high amplitude Bad detector in a 3rd generation scanner would show up as a vertical line on the sinogram

25
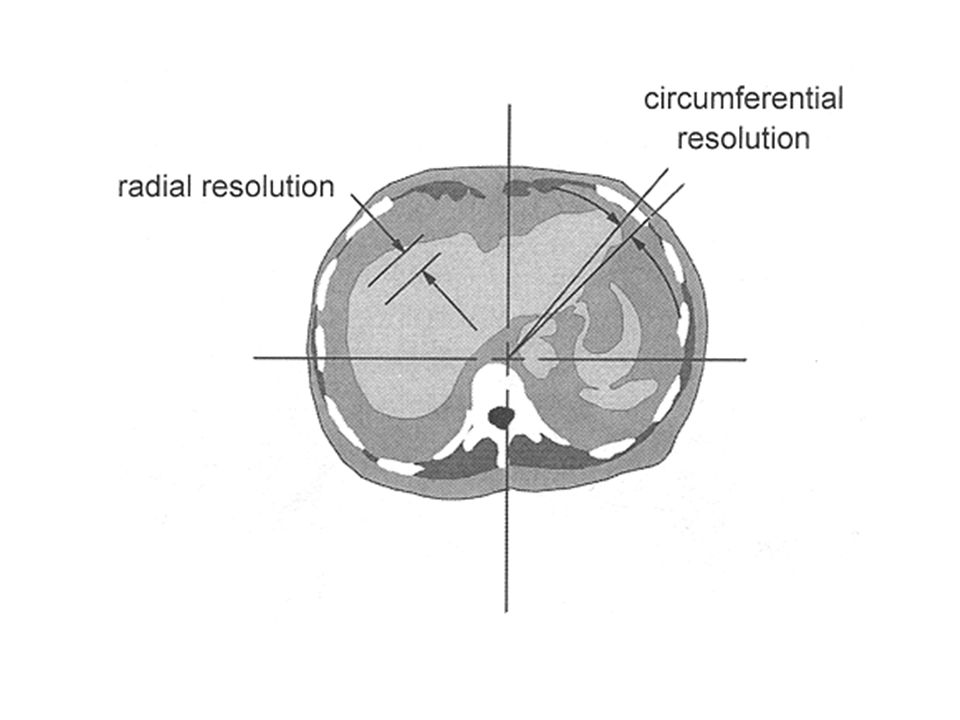
Rays and views 1st and 2nd generation scanners used 28,800 and 324,000 data points, respectively State-of-the-art scanner may aquire about 800,000 data points Modern 512 x 512 circular CT image contains about 205,000 image pixels Number of rays affects the radial component of spatial resolution; number of views affects the circumferential component of the resolution

27
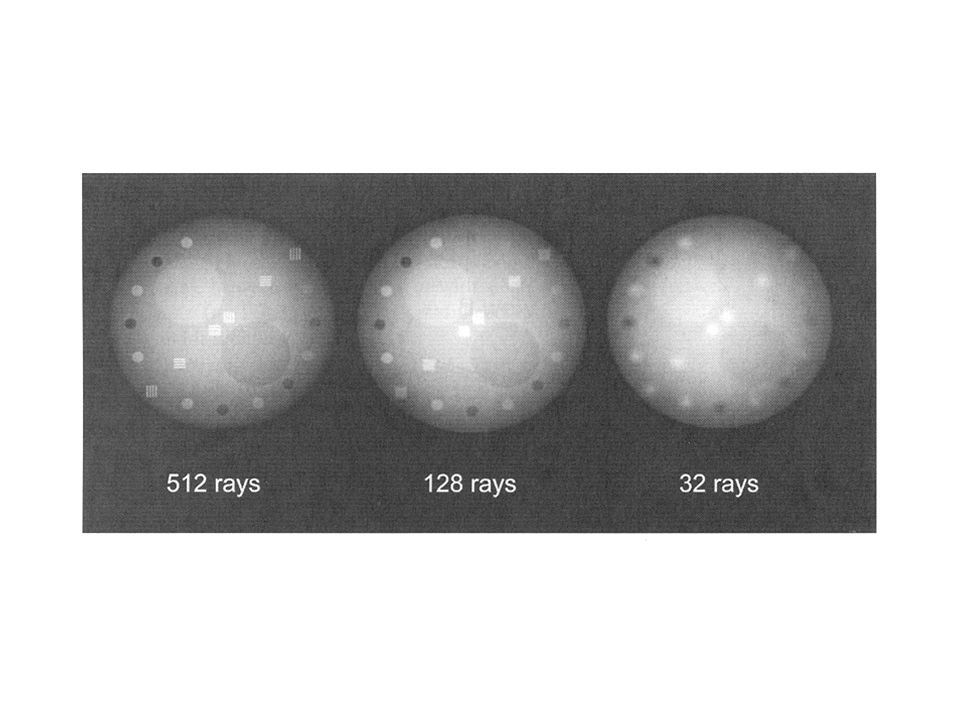
Number of rays CT images of a simulated object reconstructed with differing numbers of rays show that reducing the ray sampling results in low-resolution, blurred images

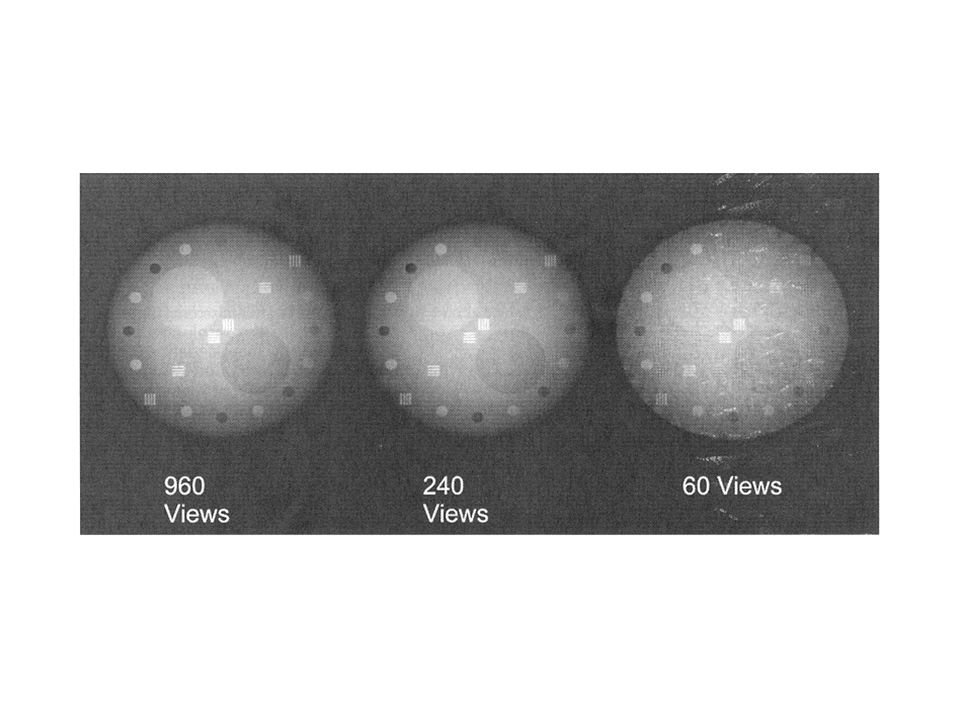
29
Number of views CT images of the simulated object reconstructed with differing numbers of views show the effect of using too few angular views (view aliasing) Sharp edges (high spatial frequencies) produce radiating artifacts that become more apparent near the periphery of the image
 Sharp edges (high spatial frequencies) produce radiating artifacts that become more apparent near the periphery of the image.")
31
Preprocessing Calibration data determined from air scans (performed by the technologist or service engineer periodically) provide correction data that are used to adjust the electronic gain of each detector Variation in geometric efficiencies caused by imperfect detector alignments is also corrected
 provide correction data that are used to adjust the electronic gain of each detector. Variation in geometric efficiencies caused by imperfect detector alignments is also corrected.")
33
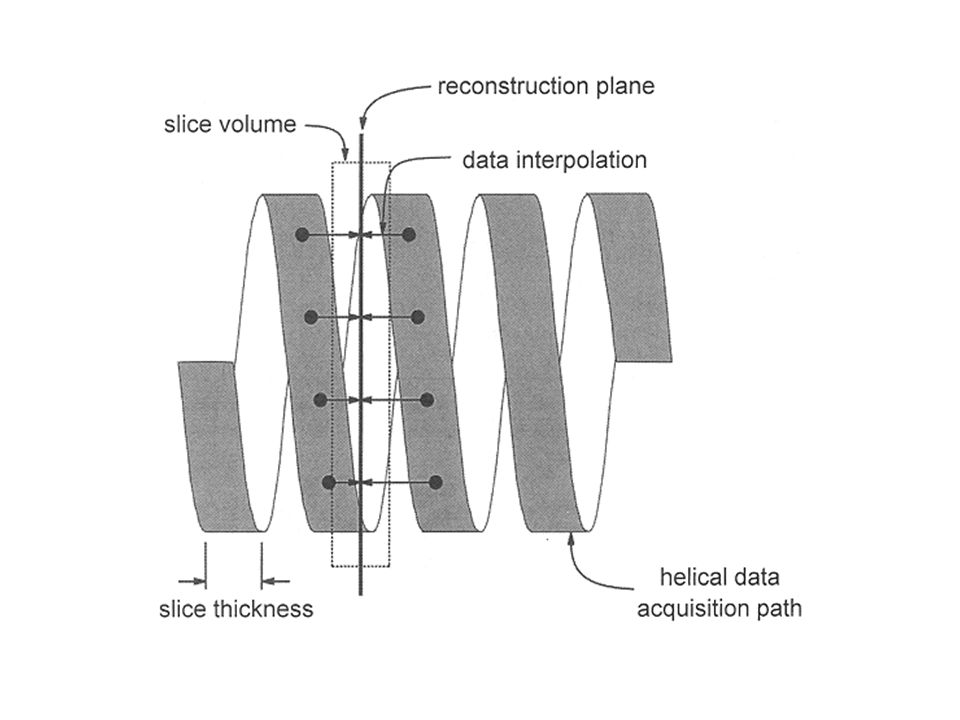
Interpolation CT reconstruction algorithms assume that the x-ray source has negotiated a circular, not helical, path around the patient Before the actual CT reconstruction, the helical data set is interpolated into a series of planar image sets With helical scanning, CT images can be reconstructed at any position along the length of the scan

35
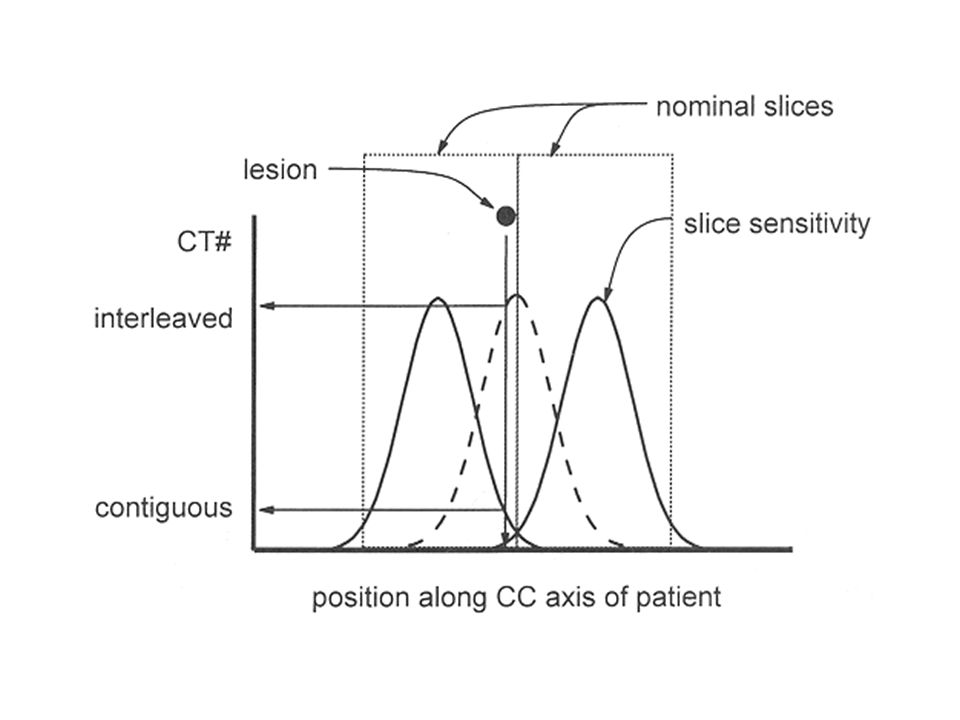
Interpolation (cont.) Interleaved reconstruction allows the placement of additional images along the patient, so that the clinical examination is almost uniformly sensitive to subtle abnormalities Adds no additional dose to the patient, but additional time is required to reconstruct the images Actual spatial resolution along the long axis of the patient still dictated by slice thickness

Similar presentations