Download presentation
Presentation is loading. Please wait.

1
Ludovico Biagi & Athanasios Dermanis Politecnico di Milano, DIIAR Aristotle University of Thessaloniki, Department of Geodesy and Surveying Crustal Deformation Analysis from Permanent GPS Networks European Geophysical Union General Assembly - EGU2009 19 -24 April 2009, Vienna, Austria

2
Our approach - Departure from classical horizontal deformation analysis:

3
- New rigorous equations for deformation invariant parameters: Principal (max-min) linear elongation factors & their directions Dilatation, (maximum) shear strain & its direction
 linear elongation factors & their directions Dilatation, (maximum) shear strain & its direction")
4
Our approach - Departure from classical horizontal deformation analysis: - New rigorous equations for deformation invariant parameters: Principal (max-min) linear elongation factors & their directions Dilatation, (maximum) shear strain & its direction - New rigorous equations for “horizontal” deformation analysis on the reference ellipsoid Attention: NOT for the physical surface of the earth, NOT 3-dimentional !
 linear elongation factors & their directions Dilatation, (maximum) shear strain & its direction - New rigorous equations for horizontal deformation analysis on the reference ellipsoid Attention: NOT for the physical surface of the earth, NOT 3-dimentional !")
5
Our approach - Departure from classical horizontal deformation analysis: - New rigorous equations for deformation invariant parameters: Principal (max-min) linear elongation factors & their directions Dilatation, (maximum) shear strain & its direction - Separation of relative rigid motion of (sub)regions from actual deformation: Identification of regions with different kinematic behavior (clustering) Use of best fitting reference system for each region (Concept of regional discrete Tisserant reference system) - New rigorous equations for “horizontal” deformation analysis on the reference ellipsoid Attention: NOT for the physical surface of the earth, NOT 3-dimentional !
 linear elongation factors & their directions Dilatation, (maximum) shear strain & its direction - Separation of relative rigid motion of (sub)regions from actual deformation: Identification of regions with different kinematic behavior (clustering) Use of best fitting reference system for each region (Concept of regional discrete Tisserant reference system) - New rigorous equations for horizontal deformation analysis on the reference ellipsoid Attention: NOT for the physical surface of the earth, NOT 3-dimentional !")
6
Our approach - Departure from classical horizontal deformation analysis: - New rigorous equations for deformation invariant parameters: Principal (max-min) linear elongation factors & their directions Dilatation, (maximum) shear strain & its direction - Separation of relative rigid motion of (sub)regions from actual deformation: Identification of regions with different kinematic behavior (clustering) Use of best fitting reference system for each region (Concept of regional discrete Tisserant reference system) - New rigorous equations for “horizontal” deformation analysis on the reference ellipsoid Attention: NOT for the physical surface of the earth, NOT 3-dimentional ! PLUS Study of signal-to-noise ratio (significance) of deformation parameters from spatially interpolated GPS velocity estimates using: - Finite element method (triangular elements) - Minimum Mean Square Error Prediction (collocation) CASE STUDY: Central Japan
 of deformation parameters from spatially interpolated GPS velocity estimates using: - Finite element method (triangular elements) - Minimum Mean Square Error Prediction (collocation) CASE STUDY: Central Japan.")
7
Deformation as comparison of tw o shapes (at two epochs) x = coordinates at epoch t Mathematical Elasticity: Deformation studied via the deformation gradient local linear approximation to the deformation function
 x = coordinates at epoch t Mathematical Elasticity: Deformation studied via the deformation gradient local linear approximation to the deformation function")
8
Deformation as comparison of tw o shapes (at two epochs) x = coordinates at epoch t u = x - x = displacements Mathematical Elasticity: Deformation studied via the deformation gradient local linear approximation to the deformation function Geophysics-Geodesy: Deformation studied via the displacement gradient and approximation to strain tensor
 x = coordinates at epoch t u = x - x = displacements Mathematical Elasticity: Deformation studied via the deformation gradient local linear approximation to the deformation function Geophysics-Geodesy: Deformation studied via the displacement gradient and approximation to strain tensor")
9
Classical horizontal deformation analysis A short review

10
Classical horizontal deformation analysis Strain tensor E : description of (quadratic) variation of length element
 variation of length element")
11
Classical horizontal deformation analysis Strain tensor E : description of (quadratic) variation of length element Geodetic data: Discrete initial coordinates x 0i and velocities v i at GPS permanent stations P i Displacements: u i = (t – t 0 ) v i
 variation of length element Geodetic data: Discrete initial coordinates x 0i and velocities v i at GPS permanent stations P i Displacements: u i = (t – t 0 ) v i")
12
SPATIAL INTERPOLATION for the determination of or Classical horizontal deformation analysis Strain tensor E : description of (quadratic) variation of length element Geodetic data: Discrete initial coordinates x 0i and velocities v i at GPS permanent stations P i Displacements: u i = (t – t 0 ) v i Require: DIFFERENTIATION for the determination of or
 variation of length element Geodetic data: Discrete initial coordinates x 0i and velocities v i at GPS permanent stations P i Displacements: u i = (t – t 0 ) v i Require: DIFFERENTIATION for the determination of or")
13
Discrete geodetic information at GPS permanent stations Classical horizontal deformation analysis

14
Discrete geodetic information at GPS permanent stations Interpolation to obtain continuous information, e.g. displacements at every point Classical horizontal deformation analysis SPATIAL INTERPOLATION

15
Discrete geodetic information at GPS permanent stations Interpolation to obtain continuous information, e.g. displacements at every point Differentiation to obtain the deformation gradient F or displacement gradient J = F - I Classical horizontal deformation analysis SPATIAL INTERPOLATION

16
Analysis of the displacement gradient J into symmetric and antisymmetric part: Classical horizontal deformation analysis

17
Analysis of the displacement gradient J into symmetric and antisymmetric part: = small rotation angle Classical horizontal deformation analysis

18
Analysis of the displacement gradient J into symmetric and antisymmetric part: diagonalization e max, e min = principal strains = direction of e max = small rotation angle Classical horizontal deformation analysis

19
Analysis of the displacement gradient J into symmetric and antisymmetric part: diagonalization = small rotation angle = dilataton = maximum shear strain = direction of Classical horizontal deformation analysis e max, e min = principal strains = direction of e max

20
Analysis of the displacement gradient J into symmetric and antisymmetric part: diagonalization = small rotation angle = dilataton = maximum shear strain = direction of Classical horizontal deformation analysis e max, e min = principal strains = direction of e max

21
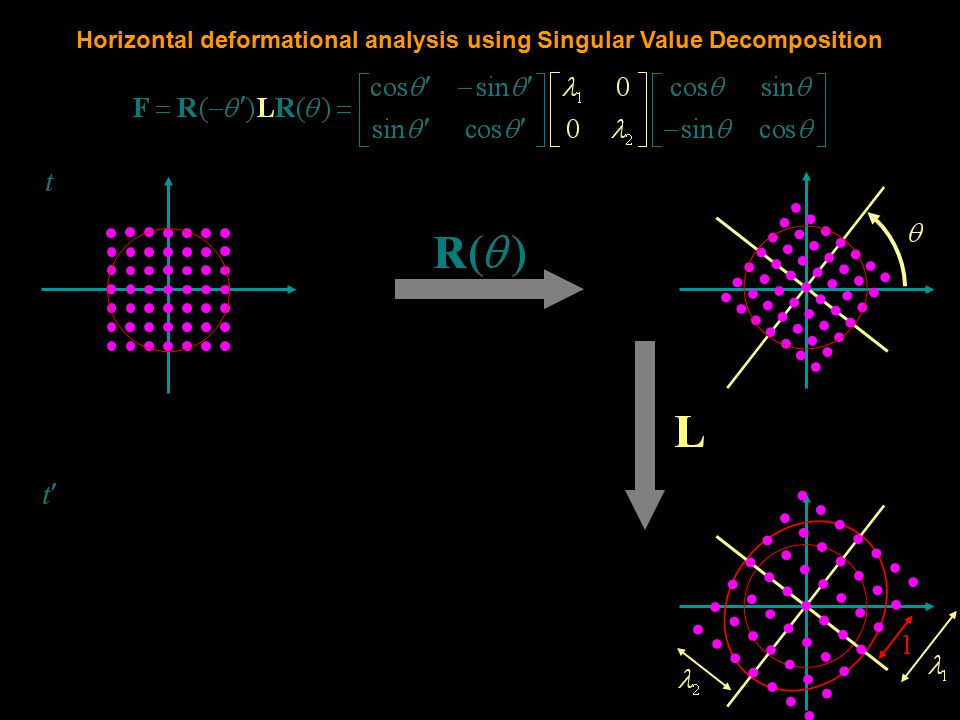
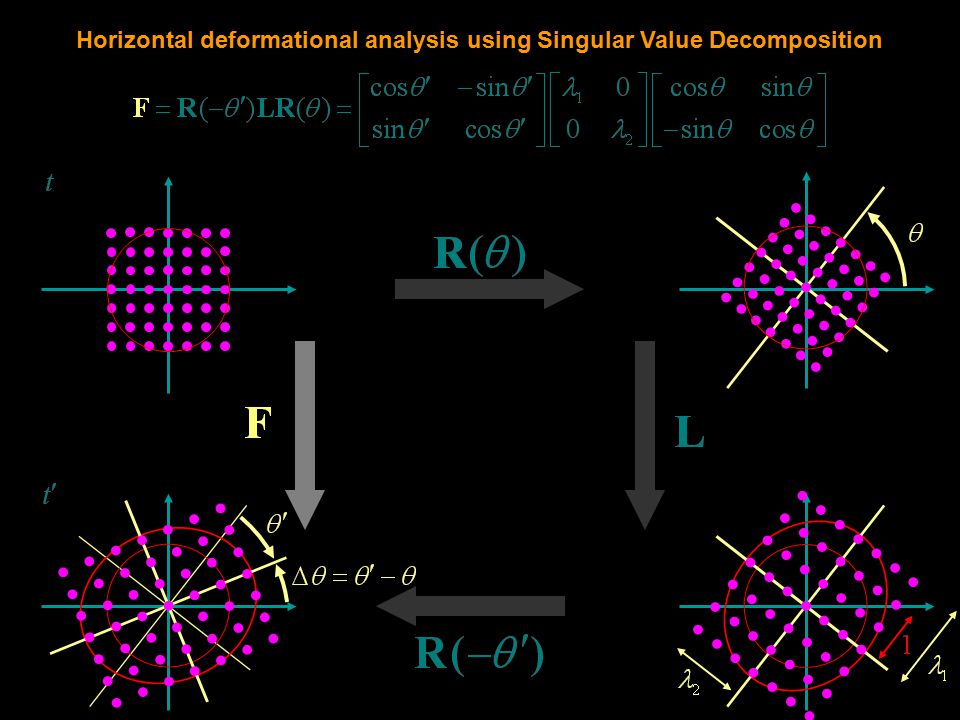
SVD Horizontal deformational analysis using the Singular Value Decomposition (SVD) A new approach
 A new approach")
22
Horizontal deformational analysis using Singular Value Decomposition from diagonalizations: SVD

23
Horizontal deformational analysis using Singular Value Decomposition

28
Rigorous derivation of invariant deformation parameters without the approximations based on the infinitesimal strain tensor

29
Rigorous derivation of invariant deformation parameters shear along the 1st axis linear scale factordirection of shear additional rotation not contributing to deformation 2 alternative 4-parametric representations

30
Rigorous derivation of invariant deformation parameters shear along the 1st axis linear scale factordirection of shear additional rotation not contributing to deformation 2 alternative 4-parametric representations

31
Rigorous derivation of invariant deformation parameters shear along the 1st axis linear scale factordirection of shear additional rotation not contributing to deformation 2 alternative 4-parametric representations

32
Rigorous derivation of invariant deformation parameters shear along the 1st axis linear scale factordirection of shear additional rotation not contributing to deformation 2 alternative 4-parametric representations

33
Rigorous derivation of invariant deformation parameters shear along the 1st axis linear scale factordirection of shear additional rotation not contributing to deformation 2 alternative 4-parametric representations

34
Rigorous derivation of invariant deformation parameters shear along the 1st axis linear scale factordirection of shear additional rotation not contributing to deformation 2 alternative 4-parametric representations

35
shear along the 1st axis Rigorous derivation of invariant deformation parameters

36
shear along direction Rigorous derivation of invariant deformation parameters

37
additional rotation (no deformation) Rigorous derivation of invariant deformation parameters
 Rigorous derivation of invariant deformation parameters")
38
additional scaling (scale factor s) Rigorous derivation of invariant deformation parameters
 Rigorous derivation of invariant deformation parameters")
39
Compare the two representations and express s, , , as functions of 1, 2, , Rigorous derivation of invariant deformation parameters

40
Derivation of dilatation

41
Use Singular Value Decomposition and replace Rigorous derivation of invariant deformation parameters Derivation of shear , and its direction

42
Rigorous derivation of invariant deformation parameters Derivation of shear , and its direction Compare

43
Rigorous derivation of invariant deformation parameters Derivation of shear , and its direction

44
Rigorous derivation of invariant deformation parameters Derivation of shear , and its direction

45
Horizontal deformation on the surface of the reference ellipsoid

46
Actual deformation is 3-dimensional Horizontal deformation on ellipsoidal surface

47
But we can observe only on 2-dimensional earth surface ! Horizontal deformation on ellipsoidal surface

48
Why not 3D deformation? 3D deformation requires not only interpolation but also an extrapolation outside the surface Extrapolation from surface geodetic data is not reliable – requires additional geophysical hypothesis INTERPOLATION EXTRAPOLATION Horizontal deformation on ellipsoidal surface

49
Standard horizontal deformation: Project surface points on horizontal plane, Study the deformation of the derived (abstract) planar surface Horizontal deformation on ellipsoidal surface
 planar surface Horizontal deformation on ellipsoidal surface")
50
Why not study deformation of actual earth surface? Local surface deformation is a view of actual 3D deformation through a section along the tangent plane to the surface. For variable terrain: we look on 3D deformation from different directions ! Horizontal and vertical deformation caused by different geophysical processes (e.g. plate motion vs postglacial uplift) Horizontal deformation on ellipsoidal surface
 Horizontal deformation on ellipsoidal surface.")
51
Our approach to horizontal deformation: Project surface points on reference ellipsoid, Study the deformation of the derived (abstract) ellipsoidal surface Horizontal deformation on ellipsoidal surface
 ellipsoidal surface Horizontal deformation on ellipsoidal surface")
52
Use curvilinear coordinates on the surface (geodetic coordinates) Formulate coordinate gradient HOW IT IS DONE: Horizontal deformation on ellipsoidal surface
 Formulate coordinate gradient HOW IT IS DONE: Horizontal deformation on ellipsoidal surface")
53
HOW IT IS DONE: F q refers to local (non orthonormal) coordinate bases: Horizontal deformation on ellipsoidal surface
 coordinate bases: Horizontal deformation on ellipsoidal surface")
54
HOW IT IS DONE: F q refers to local (non orthonormal) coordinate bases: Change to orthonormal bases: converting metric matrices to identity Horizontal deformation on ellipsoidal surface
 coordinate bases: Change to orthonormal bases: converting metric matrices to identity Horizontal deformation on ellipsoidal surface")
55
HOW IT IS DONE: F q refers to local (non orthonormal) coordinate bases: Change to orthonormal bases: Transform F q to orthonormal bases: converting metric matrices to identity Horizontal deformation on ellipsoidal surface
 coordinate bases: Change to orthonormal bases: Transform F q to orthonormal bases: converting metric matrices to identity Horizontal deformation on ellipsoidal surface")
56
HOW IT IS DONE: THEN PROCEED AS IN THE PLANAR CASE

57
Separation of rigid motion from deformation The concept of the discrete Tisserant reference system best adapted to a particular region

58
Separation of rigid motion from deformation SPATIAL INTERPOLATION

59
Separation of rigid motion from deformation

60
BAD SPATIAL INTERPOLATION Separation of rigid motion from deformation

61
GOOD SPATIAL INTERPOLATION PIECEWISE INTERPOLATION INVOLVES DISCONTINUITIES = FAULTS ! Separation of rigid motion from deformation

62
Horizontal Displacements Separation of rigid motion from deformation

63
Horizontal Displacements Separation of rigid motion from deformation

64
Different displacements behavior in 3 regions Apart from internal deformation regions are in relative motion Separation of rigid motion from deformation

65
HOW TO REPRESENT THE MOTION OF A DEFORMING REGION AS A WHOLE ? BY THE MOTION OF A REGIONAL OPTIMAL REFERENCE SYSTEM ! OPTIMAL = SUCH THAT THE CORRESPONDING DISPLACEMENTS (OR VELOVITIES) BECOME AS SMALL AS POSSIBLE Separation of rigid motion from deformation
 BECOME AS SMALL AS POSSIBLE Separation of rigid motion from deformation.")
66
ORIGINAL REFERENCE SYSTEM OPTIMAL REFERENCE SYSTEM Motion as whole ( = motion of reference system) + internal deformation ( = motion with respect to the reference system) Separation of rigid motion from deformation
 + internal deformation ( = motion with respect to the reference system) Separation of rigid motion from deformation")
67
Horizontal motion on earth ellipsoid ( sphere): Rotation around an axis with angular velocity Separation of rigid motion from deformation
: Rotation around an axis with angular velocity Separation of rigid motion from deformation")
68
Horizontal motion on earth ellipsoid ( sphere): Rotation around an axis with angular velocity DEFINITION OF OPTIMAL FRAME: Minimization of relative kinetic energy of regional network Discrete Tisserant reference system Separation of rigid motion from deformation
: Rotation around an axis with angular velocity DEFINITION OF OPTIMAL FRAME: Minimization of relative kinetic energy of regional network Discrete Tisserant reference system Separation of rigid motion from deformation")
69
Horizontal motion on earth ellipsoid ( sphere): Rotation around an axis with angular velocity DEFINITION OF OPTIMAL FRAME: Minimization of relative kinetic energy of regional network Discrete Tisserant reference system Separation of rigid motion from deformation SOLUTION: = inertia matrix = relative angular momentum Migrating pole, variable angular velocity versus usual constant rotation (Euler rotation)
: Rotation around an axis with angular velocity DEFINITION OF OPTIMAL FRAME: Minimization of relative kinetic energy of regional network Discrete Tisserant reference system Separation of rigid motion from deformation SOLUTION: = inertia matrix = relative angular momentum Migrating pole, variable angular velocity versus usual constant rotation (Euler rotation)")
70
Spatial interpolation or prediction

71
TRIANGULAR FINITE ELEMENTSMINIMUM MEAN SQUARE ERROR PREDICTION (COLLOCATION) Spatial interpolation or prediction true interpolated true interpolated
 Spatial interpolation or prediction true interpolated true interpolated")
72
TRIANGULAR FINITE ELEMENTSMINIMUM MEAN SQUARE ERROR PREDICTION (COLLOCATION) Spatial interpolation or prediction Deterministic interpolationInterpolation by stochastic prediction true interpolated true interpolated
 Spatial interpolation or prediction Deterministic interpolationInterpolation by stochastic prediction true interpolated true interpolated")
73
TRIANGULAR FINITE ELEMENTSMINIMUM MEAN SQUARE ERROR PREDICTION (COLLOCATION) Spatial interpolation or prediction Piecewise linear displacements Piecewise constant deformation parameters Continuous displacements Continuous deformation parameters Deterministic interpolationInterpolation by stochastic prediction true interpolated true interpolated
 Spatial interpolation or prediction Piecewise linear displacements Piecewise constant deformation parameters Continuous displacements Continuous deformation parameters Deterministic interpolationInterpolation by stochastic prediction true interpolated true interpolated")
74
TRIANGULAR FINITE ELEMENTSMINIMUM MEAN SQUARE ERROR PREDICTION (COLLOCATION) Spatial interpolation or prediction Piecewise linear displacements Piecewise constant deformation parameters Continuous displacements Continuous deformation parameters Observation errors completely absorbed in deformation parameters estimates Observation errors partially removed by interpolation smoothing Deterministic interpolationInterpolation by stochastic prediction true interpolated true interpolated
 Spatial interpolation or prediction Piecewise linear displacements Piecewise constant deformation parameters Continuous displacements Continuous deformation parameters Observation errors completely absorbed in deformation parameters estimates Observation errors partially removed by interpolation smoothing Deterministic interpolationInterpolation by stochastic prediction true interpolated true interpolated")
75
TRIANGULAR FINITE ELEMENTSMINIMUM MEAN SQUARE ERROR PREDICTION (COLLOCATION) Spatial interpolation or prediction Piecewise linear displacements Piecewise constant deformation parameters Continuous displacements Continuous deformation parameters Observation errors completely absorbed in deformation parameters estimates Observation errors partially removed by interpolation smoothing Deterministic interpolationInterpolation by stochastic prediction Accuracy estimates of deformation parameters reflect only data uncertainty Accuracy estimates of deformation parameters reflect both data and interpolation uncertainty true interpolated true interpolated
 Spatial interpolation or prediction Piecewise linear displacements Piecewise constant deformation parameters Continuous displacements Continuous deformation parameters Observation errors completely absorbed in deformation parameters estimates Observation errors partially removed by interpolation smoothing Deterministic interpolationInterpolation by stochastic prediction Accuracy estimates of deformation parameters reflect only data uncertainty Accuracy estimates of deformation parameters reflect both data and interpolation uncertainty true interpolated true interpolated")
76
Principal linear elongation factors vs principal strains A comparison

77
Linear elongations and strains StrainsLinear elongation factors Definitions

78
Linear elongations and strains StrainsLinear elongation factors Definitions Computation from diagonalizations

79
Linear elongations and strains StrainsLinear elongation factors Meaning ? clear meaning ! Definitions Computation from diagonalizations Interpretation

80
Linear elongations and strains StrainsLinear elongation factors Meaning ? clear meaning ! Definitions Computation from diagonalizations Interpretation Relation

81
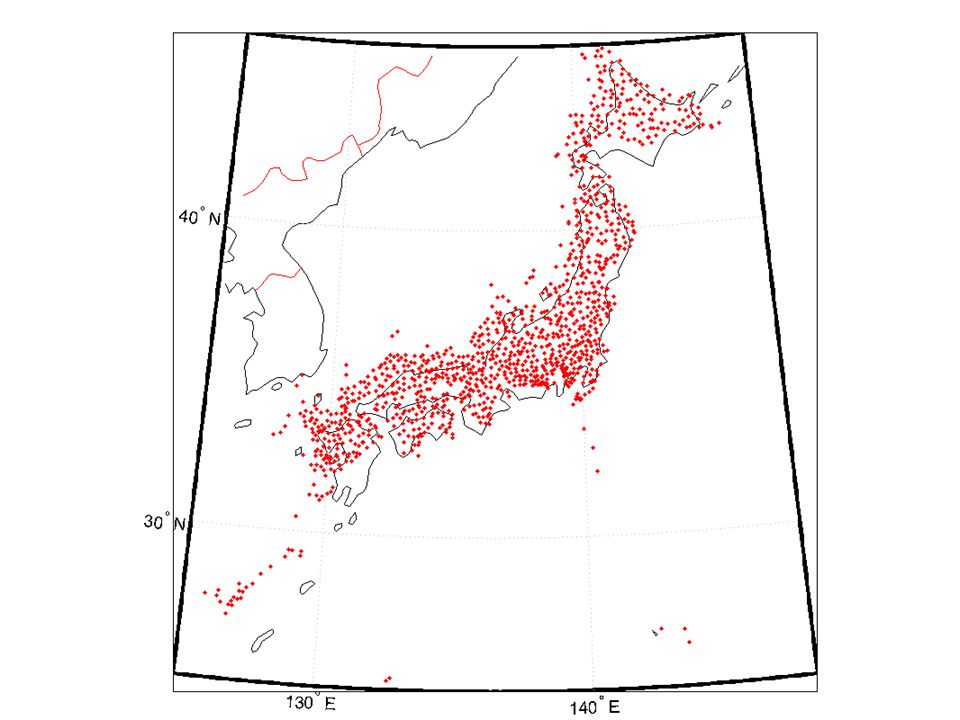
Case study: National permanent GPS network in Central Japan

83
Case study: Central Japan Original velocities

84
Reduced velocities (removal of rotation) Case study: Central Japan
 Case study: Central Japan")
85
Reduced velocities

86
Case study: Central Japan Division in 3 regions. Relative velocities w.r. region R2 after removal of rigid rotations

87
Linear elongation factors max = 1, min = 2 FINITE ELEMENTS SEPARATE COLLOCATIONS IN EACH REGION

88
Dilatation and shear FINITE ELEMENTSCOLLOCATION

89
SNR = Signal to Noise Ration FINITE ELEMENTS COLLOCATION

90
FINITE ELEMENTS COLLOCATION SNR = Signal to Noise Ration

91
Linear trends in each sub-region ( max -1) 10 6 0.002 0.006 ( min -1) 10 6 0.044 0.008 57.1 6.0 10 6 0.043 0.010 10 6 0.046 0.010 12.1 6.0 ( max -1) 10 6 0.004 0.007 ( min -1) 10 6 0.072 0.008 89.6 3.9 10 6 0.068 0.011 10 6 0.076 0.011 134.6 3.9 ( max -1) 10 6 0.001 0.013 ( min -1) 10 6 0.116 0.021 69.5 5.8 10 6 0.117 0.024 10 6 0.116 0.026 24.5 5.8 R1 R2 R3 R1 R2 R3
 ( min -1) 10 6 57.1 6.0 10 6 12.1 6.0 ( max -1) ( min -1) 10 6 89.6 3.9 10 6 3.9 ( max -1) 10 6 ( min -1) 10 6 69.5 5.8 10 6 24.5 5.8 R1 R2 R3 R1 R2 R3")
92
Conclusions Minimum Mean Square Error Prediction (collocation) has the following advantages: - Produces continuous results for any desired point in the region of application -Provides smooth results where the effect of the data errors is partially removed - Provides more realistic variances-covariances which in addition to the data uncertainty reflect also the interpolation uncertainty
 has the following advantages: - Produces continuous results for any desired point in the region of application -Provides smooth results where the effect of the data errors is partially removed - Provides more realistic variances-covariances which in addition to the data uncertainty reflect also the interpolation uncertainty")
93
THANKS FOR YOUR ATTENTION A copy of this presentation can be downloaded from http://der.topo.auth.gr/

Similar presentations