Download presentation
Presentation is loading. Please wait.

2
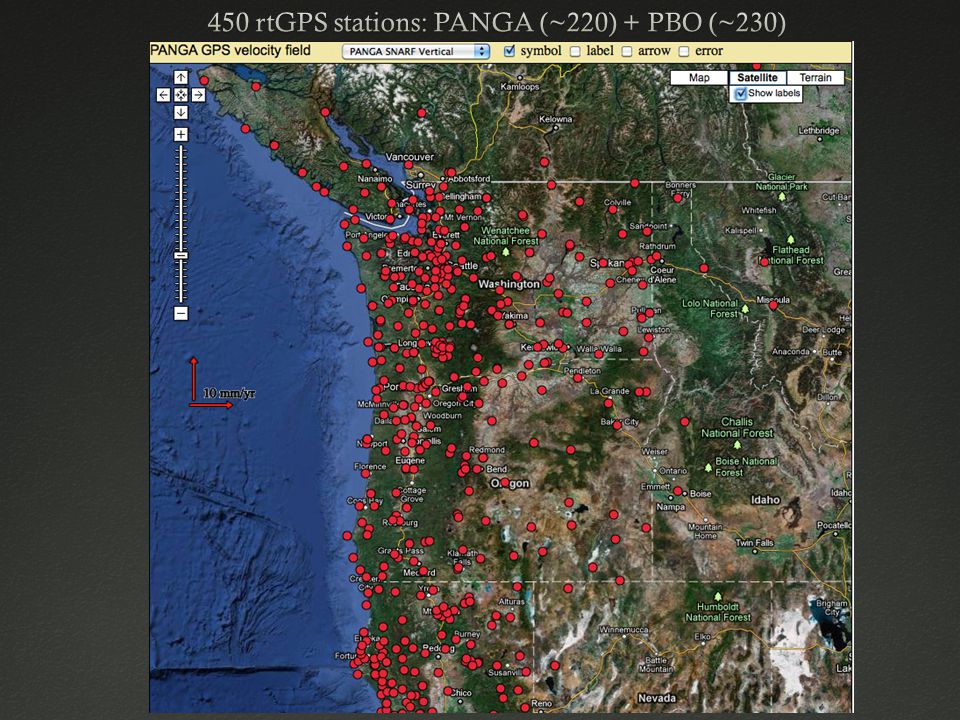
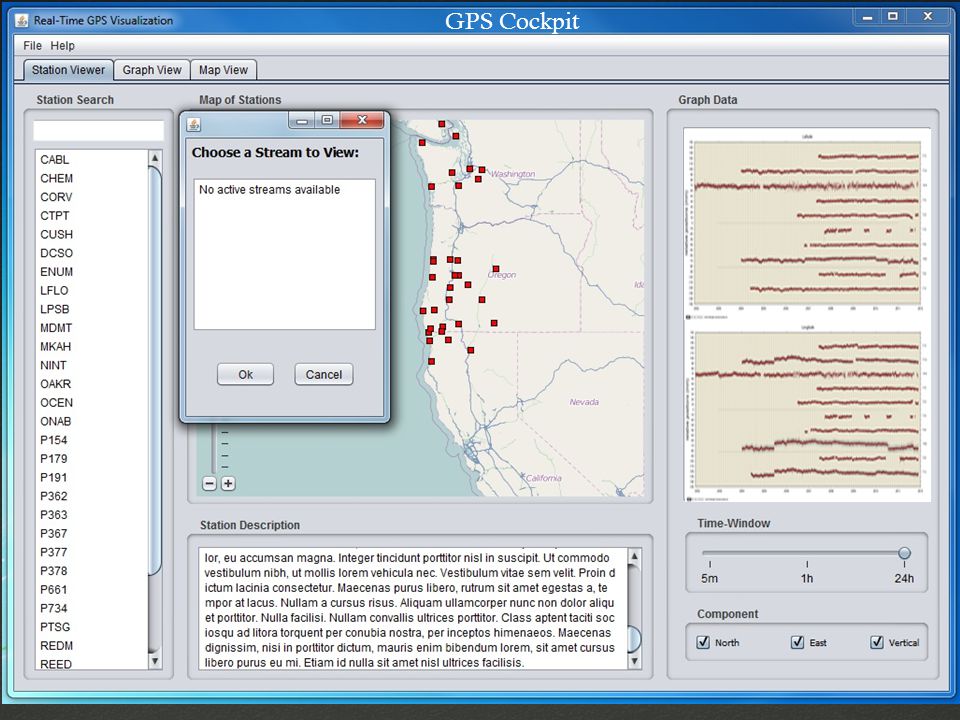
Overview 1. (L1) Cascadia real-time GPS Station Network (PANGA + PBO) 2.(L2) GPS processing (phase+psuedorange data -> position estimates) 3.(L3) EEW products derived from rtGPS position streams 4.Example earthquakes as examples – 2010 Sierra El Mayor, 2010 Maule, 2011 Tohoku-Oki 5.GPS Cockpit Project: Managing rtGPS time series and derived products
 Cascadia real-time GPS Station Network (PANGA + PBO) 2.(L2) GPS processing (phase+psuedorange data -> position estimates) 3.(L3) EEW products derived from rtGPS position streams 4.Example earthquakes as examples – 2010 Sierra El Mayor, 2010 Maule, 2011 Tohoku-Oki 5.GPS Cockpit Project: Managing rtGPS time series and derived products.")
3
Seattle M6-7 crustal faults not well known, <1m EEW M8-9: megathrust, <5m EEW

5
Latency: most data arrives in less than 1 second PANGA telemetered to CWU PBO telemetered to UNAVCO, then to CWU Arrival at CWUArrival at Boulder

6
Relative Positioning Absolute (Point) Positioning Higher relative precision Requires stable reference station Requires dense network Primarily commercial RTK Lower absolute precision (improving) Single station-capable Linear wrt station # Requires rt orbit + clock corrections Requires extensive data editing
 Positioning Higher relative precision Requires stable reference station Requires dense network Primarily commercial RTK Lower absolute precision (improving) Single station-capable Linear wrt station # Requires rt orbit + clock corrections Requires extensive data editing")
7
-(1) Relative positioning: Trimble commercial product (joint w/ WSRN and OGRN RTK processing) -(2) Real-time GIPSY Point positioning: -(3) Developing standard GIPSY (not RTG) processing with clock and orbit correction streams from DLR (German Aerospace Center, Munich, Hauschild)
 Relative positioning: Trimble commercial product (joint w/ WSRN and OGRN RTK processing) -(2) Real-time GIPSY Point positioning: -(3) Developing standard GIPSY (not RTG) processing with clock and orbit correction streams from DLR (German Aerospace Center, Munich, Hauschild)")
8
(Method 1) Trimble T4D operated jointly with WSRN & OGRN
 Trimble T4D operated jointly with WSRN & OGRN")
9
Trimble T4D operated jointly with WSRN & OGRN

10
Method 2: JPL GDGPS RT-GIPSY SYSTEM (Bar-Sever)
")
11
Requires clock corrections streamed over Ntrip (DLR, IGS Method 3: CWU short-arc real-time processing with GIPSY

12
IGS Final Method 3: CWU real-time processing with GIPSY

13
-Requires extensive phase-level data QC -Less than 5s latency

14
BREW CNCR CABL TRND CHZZ ~10cm deviations are common in all methods

15
2010 Maule Chile M8.8 Mike Bevis, UNAVCO 4. Example Earthquakes

16
2010 Maule: Absolute point positioning of CONZ2010 Maule: Absolute point positioning of CONZ east north 3m

17
Sierra El Mayor, 4/4/2010Sierra El Mayor, 4/4/2010

18
Good agreement between GPS PP and Accelerometer Data

19
CWU, pp., 5 minutes http://www.panga.cwu.edu/events/baja/ PBO, relative p., 24+24 hr http://supersites.earthobservations.org/baja.php Absolute vs. relative positioning

20
pgDisplacement- 2010 Sierra El MayorpgDisplacement- 2010 Sierra El Mayor GPS PGDSeismic PGA

21
2011 Tohoku-Oki Earthquake GEONET GPS ARRAY

24
+15s: Seismic Detection NEIC W phase: M9.0 ~20 minutes

25
2011 Tohoku-Oki 3d GPS displacements (3x speed)2011 Tohoku-Oki 3d GPS displacements (3x speed)
2011 Tohoku-Oki 3d GPS displacements (3x speed)")
26
+60s: Mw 8.47 GPS Moment Estimate

27
+90s: Mw 8.80 GPS Moment Estimate

28
+120s: Mw 9.04 GPS Moment Estimate

29
+180s: Mw 9.05 GPS Moment Estimate

30
+15s: Seismic Detection NEIC W phase: M9.0 ~20 minutes 60s:M8.590s:M8.8120s:M9.04

31
-Time Series viewer (interactive): negation of false positives -Data Aggregator (Perl, modular, talk to Craig Scrivner) -Many new derived products: -DefMaps -Inversions -GPS ShakeCast -Assimilation into seismic EEW not obvious
: negation of false positives -Data Aggregator (Perl, modular, talk to Craig Scrivner) -Many new derived products: -DefMaps -Inversions -GPS ShakeCast -Assimilation into seismic EEW not obvious")
32
GPS Cockpit DefMap Slip

33
GPS Cockpit

35
Time for a demo!

36
Conclusions 1. Cascadia has mature real-time GPS networks (PANGA + PBO) 2.Data analysis is evolving rapidly 3.EEW products based on rtGPS position streams are also improving 4.Recent earthquakes show the importance of rtGPS in hazards monitoring 5.GPS Cockpit: First release on March 15
 2.Data analysis is evolving rapidly 3.EEW products based on rtGPS position streams are also improving 4.Recent earthquakes show the importance of rtGPS in hazards monitoring 5.GPS Cockpit: First release on March 15.")
Similar presentations






>")




 Yoshiyuki KANEDA DONET GROUP Department of Oceanfloor Network System Development.>")









 Slot (NASA,NSF) 4:10 SIO Overview (Yehuda) 4:20 UC Berkeley Overview (Ingrid) 4:30 CWU Overview.>")