Download presentation
Presentation is loading. Please wait.

1
Dynamic Behavior of Closed-Loop Control Systems Chapter 9

2
Control System Instrumentation Figure 9.3 A typical process transducer. Transducers and Transmitters Figure 9.3 illustrates the general configuration of a measurement transducer; it typically consists of a sensing element combined with a driving element (transmitter). Chapter 9
. Chapter 9.")
3
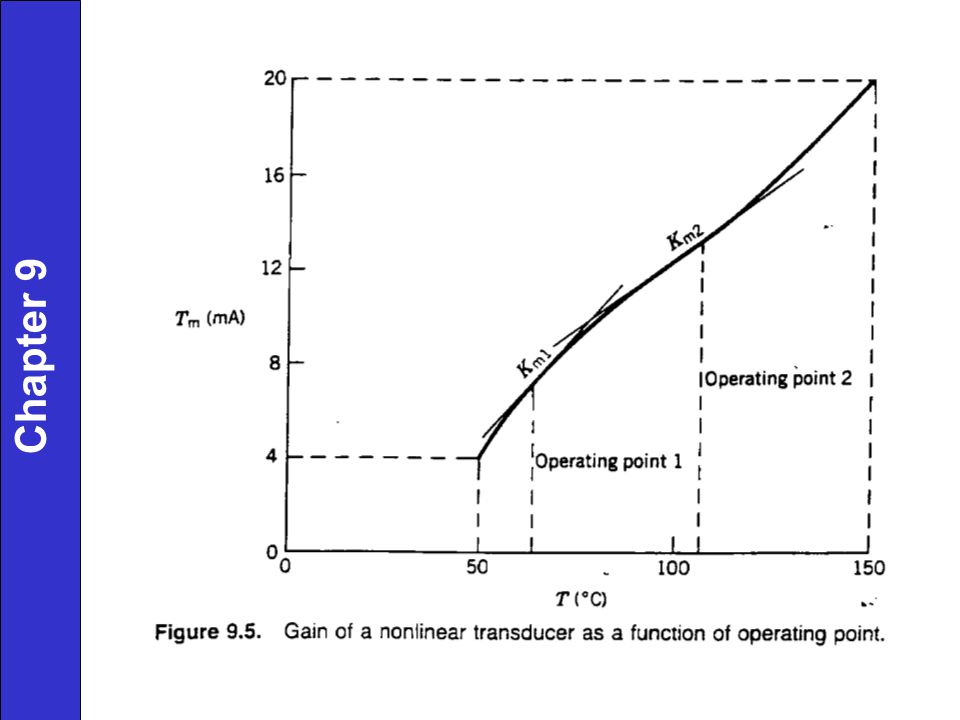
Since about 1960, electronic instrumentation has come into widespread use. Sensors The book briefly discusses commonly used sensors for the most important process variables. (See text.) Transmitters A transmitter usually converts the sensor output to a signal level appropriate for input to a controller, such as 4 to 20 mA. Transmitters are generally designed to be direct acting. In addition, most commercial transmitters have an adjustable input range (or span). For example, a temperature transmitter might be adjusted so that the input range of a platinum resistance element (the sensor) is 50 to 150 °C. Chapter 9
 Transmitters A transmitter usually converts the sensor output to a signal level appropriate for input to a controller, such as 4 to 20 mA. Transmitters are generally designed to be direct acting. In addition, most commercial transmitters have an adjustable input range (or span). For example, a temperature transmitter might be adjusted so that the input range of a platinum resistance element (the sensor) is 50 to 150 °C. Chapter 9.")
5
Instrument Selection Criteria solid/gas/liquid, corrosive fluid nature of signal, speed of response accuracy, measurement range costs previous plant practice available space maintenance, reliability materials of construction invasive/non-invasive environmental/safety (enclosures, fugitive emissions)
")
6
Chapter 9

7
Transmitter/Controller Chapter 9 May need additional transducers for G m if its output is in mA or psi. In the above case, G c is dimensionless (volts/volts).
..")
8
Chapter 9

9
Figure 9.15 Nonideal instrument behavior: (a) hysteresis, (b) deadband. Chapter 9
 hysteresis, (b) deadband. Chapter 9")
13
Measurement / Transmission Lags Temperature sensor make as small as possible (location, materials for thermowell) Pneumatic transmission lines usually pure time delay, measure experimentally (no time delays for electronic lines); less common today compared to electronic transmissions. Chapter 9

17
from Riggs, J.B., Chemical Process Control Numbers in table above correspond to C v f(l), dp in psi, q in gal/min, and g s is specific gravity:
, dp in psi, q in gal/min, and g s is specific gravity:")
18
Three valve characteristics determined by plug shape: (1) Quick Opening (square root trim) (2) Linear Trim (3) Equal Percentage must take other flow obstructions into account for actual valve performance Chapter 9
 Quick Opening (square root trim) (2) Linear Trim (3) Equal Percentage must take other flow obstructions into account for actual valve performance Chapter 9")
19
See Example 9.2

20
Suppose valve has linear trim and flow must be changed. If p through exchanger does not change, valve would behave linearly (true for low flow rates), since it takes most of p. For lower flow rates, p through exchanger will be reduced, changing effective valve characteristics (valve must close more than expected nonlinear behavior). Equal % in this case behaves more like linear valve. Size p valve = 25% total p, at s=50% (Δp→$) valves need to operate between 5% and 95%, Chapter 9
, since it takes most of p. For lower flow rates, p through exchanger will be reduced, changing effective valve characteristics (valve must close more than expected nonlinear behavior). Equal % in this case behaves more like linear valve. Size p valve = 25% total p, at s=50% (Δp→$) valves need to operate between 5% and 95%, Chapter 9.")
23
Pneumatic control valves are to be specified for the applications listed below. State whether an A-O or A-C valve should be specified for the following manipulated variables: (a)Steam pressure in a reactor heating coil. (b)Flow rate of reactants into a polymerization reactor. (c)Flow of effluent from a wastewater treatment holding tank into a river. (d)Flow of cooling water to a distillation condenser. Failure philosophy: Keep process pressure low, protect environment (equipment and engineers) Chapter 9
Steam pressure in a reactor heating coil. (b)Flow rate of reactants into a polymerization reactor. (c)Flow of effluent from a wastewater treatment holding tank into a river. (d)Flow of cooling water to a distillation condenser. Failure philosophy: Keep process pressure low, protect environment (equipment and engineers) Chapter 9.")
24
Previous chapterNext chapter

Similar presentations


















 2- Empirical modeling (Smith & Corripio, Chapter 7) 3->")






>")