Download presentation
Presentation is loading. Please wait.

1
Lecture 24: Segmentation CS6670: Computer Vision Noah Snavely From Sandlot ScienceSandlot Science

2
Announcements Final project presentations – Wednesday, December 16 th, 2-4:45pm, Upson 315 – Volunteers to present on Tuesday the 15 th ? Final quiz this Thursday

3
Deblurring Application: Hubble Space Telescope Launched with flawed mirror Initially used deconvolution to correct images before corrective optics installed Image of star

4
Fast Separation of Direct and Global Images Using High Frequency Illumination Shree K. Nayar Gurunandan G. Krishnan Columbia University SIGGRAPH 2006 Michael D. Grossberg City College of New York Ramesh Raskar MERL

5
source surface P Direct and Global Illumination A A : Direct B B : Interrelection C C : Subsurface D participating medium D : Volumetric translucent surface E E : Diffusion camera

6
direct global radiance Direct and Global Components: Interreflections surface i camera source j BRDF and geometry

7
High Frequency Illumination Pattern surface camera source fraction of activated source elements + i

8
High Frequency Illumination Pattern surface fraction of activated source elements camera source + - i

9
Separation from Two Images directglobal

10
Other Global Effects: Subsurface Scattering translucent surface camera source i j

11
Other Global Effects: Volumetric Scattering surface camera source participating medium i j

12
Diffuse Interreflections Specular Interreflections Volumetric Scattering Subsurface Scattering Diffusion

13
Scene

14
DirectGlobal

15
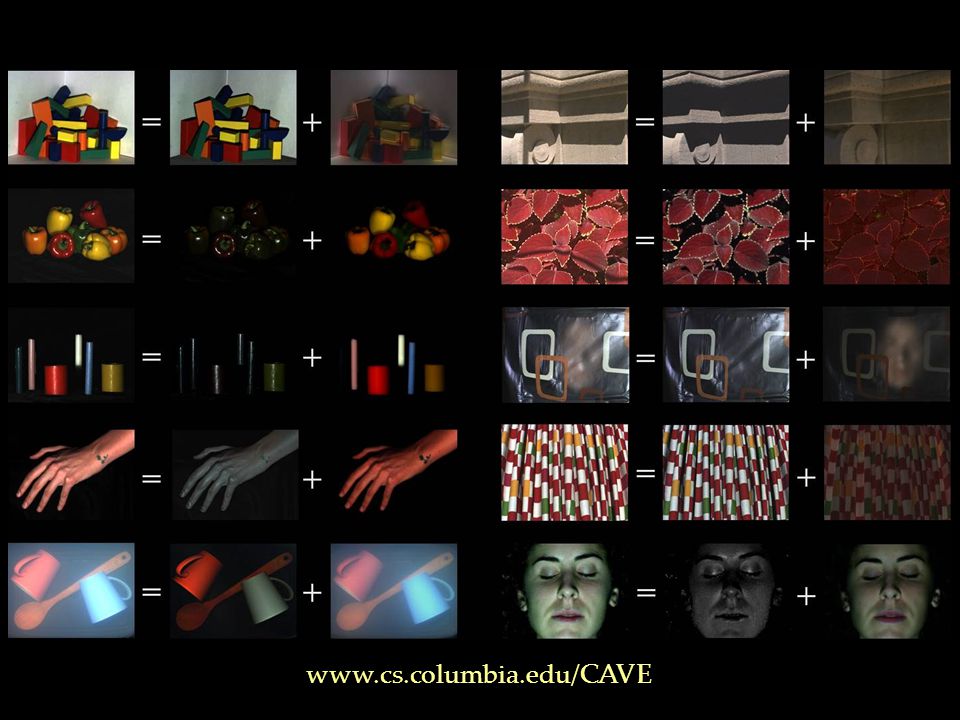
Real World Examples:

16
Eggs: Diffuse Interreflections DirectGlobal

17
Wooden Blocks: Specular Interreflections DirectGlobal

18
Kitchen Sink: Volumetric Scattering Volumetric Scattering: Chandrasekar 50, Ishimaru 78 DirectGlobal

19
Peppers: Subsurface Scattering DirectGlobal

20
Hand DirectGlobal Skin: Hanrahan and Krueger 93, Uchida 96, Haro 01, Jensen et al. 01, Cula and Dana 02, Igarashi et al. 05, Weyrich et al. 05

21
Face: Without and With Makeup GlobalDirect GlobalDirect Without Makeup With Makeup

22
Blonde Hair Hair Scattering: Stamm et al. 77, Bustard and Smith 91, Lu et al. 00 Marschner et al. 03 DirectGlobal

23
Photometric Stereo using Direct Images Bowl Shape Source 1 Source 2 Source 3 Direct Global Nayar et al., 1991

24
www.cs.columbia.edu/CAVE
25
Questions?

26
From images to objects What defines an object? Subjective problem, but has been well-studied Gestalt Laws seek to formalize this –proximity, similarity, continuation, closure, common fate –see notes by Steve Joordens, U. Torontonotes

27
Extracting objects How could we do this automatically (or at least semi-automatically)?
")
28
The Gestalt school Grouping is key to visual perception Elements in a collection can have properties that result from relationships “The whole is greater than the sum of its parts” subjective contours occlusion familiar configuration http://en.wikipedia.org/wiki/Gestalt_psychology Slide from S.Lazebnik

29
The ultimate Gestalt? Slide from S.Lazebnik

30
Gestalt factors These factors make intuitive sense, but are very difficult to translate into algorithms Slide from S.Lazebnik

31
Semi-automatic binary segmentation

32
Intelligent Scissors (demo)
")
33
Intelligent Scissors [Mortensen 95] Approach answers a basic question – Q: how to find a path from seed to mouse that follows object boundary as closely as possible?
![Intelligent Scissors [Mortensen 95] Approach answers a basic question – Q: how to find a path from seed to mouse that follows object boundary as closely as possible](http://images.slideplayer.com/13/3907780/slides/slide_33.jpg "Intelligent Scissors [Mortensen 95] Approach answers a basic question – Q: how to find a path from seed to mouse that follows object boundary as closely as possible")
34
GrabCut Grabcut [Rother et al., SIGGRAPH 2004]Rother et al., SIGGRAPH 2004
![GrabCut Grabcut [Rother et al., SIGGRAPH 2004]Rother et al., SIGGRAPH 2004](http://images.slideplayer.com/13/3907780/slides/slide_34.jpg "GrabCut Grabcut [Rother et al., SIGGRAPH 2004]Rother et al., SIGGRAPH 2004")
35
Is user-input required? Our visual system is proof that automatic methods are possible classical image segmentation methods are automatic Argument for user-directed methods? only user knows desired scale/object of interest

36
q Automatic graph cut [Shi & Malik] Fully-connected graph node for every pixel link between every pair of pixels, p,q cost c pq for each link –c pq measures similarity »similarity is inversely proportional to difference in color and position p C pq c
![q Automatic graph cut [Shi & Malik] Fully-connected graph node for every pixel link between every pair of pixels, p,q cost c pq for each link –c pq measures similarity »similarity is inversely proportional to difference in color and position p C pq c](http://images.slideplayer.com/13/3907780/slides/slide_36.jpg "q Automatic graph cut [Shi & Malik] Fully-connected graph node for every pixel link between every pair of pixels, p,q cost c pq for each link –c pq measures similarity »similarity is inversely proportional to difference in color and position p C pq c")
37
Segmentation by Graph Cuts Break Graph into Segments Delete links that cross between segments Easiest to break links that have low cost (similarity) –similar pixels should be in the same segments –dissimilar pixels should be in different segments w ABC
 –similar pixels should be in the same segments –dissimilar pixels should be in different segments w ABC")
38
Cuts in a graph Link Cut set of links whose removal makes a graph disconnected cost of a cut: A B Find minimum cut gives you a segmentation

39
But min cut is not always the best cut...

40
Cuts in a graph A B Normalized Cut a cut penalizes large segments fix by normalizing for size of segments volume(A) = sum of costs of all edges that touch A
 = sum of costs of all edges that touch A")
41
Interpretation as a Dynamical System Treat the links as springs and shake the system elasticity proportional to cost vibration “modes” correspond to segments –can compute these by solving an eigenvector problem –http://www.cis.upenn.edu/~jshi/papers/pami_ncut.pdfhttp://www.cis.upenn.edu/~jshi/papers/pami_ncut.pdf

42
Interpretation as a Dynamical System Treat the links as springs and shake the system elasticity proportional to cost vibration “modes” correspond to segments –can compute these by solving an eigenvector problem –http://www.cis.upenn.edu/~jshi/papers/pami_ncut.pdfhttp://www.cis.upenn.edu/~jshi/papers/pami_ncut.pdf

43
Color Image Segmentation

44
Extension to Soft Segmentation Each pixel is convex combination of segments. Levin et al. 2006 Levin et al. 2006 - compute mattes by solving eigenvector problem

Similar presentations







 Segmentation Carsten Rother Vladimir Kolmogorov Andrew Blake Antonio Criminisi Geoffrey Cross [based on Siggraph.>")



 Segmentation Joon Jae Lee Keimyung University Welcome. I will present Grabcut – an Interactive tool for foreground.>")

 Back to boundary detection –This time using perceptual grouping. This is non-parametric –We’re not looking for a contour of a.>")





