Download presentation
Presentation is loading. Please wait.

1
Hierarchical Task and Motion Planning in Now Leslie P. Kaelbling and Tomas Lozano-Perez Department of Computer Science & Engineering, MIT Kai Liu June 19, 2013

2
1 Outline

3
Outline Introduction: Motivation & Goal Representation: Goals & Operations Main ideas Algorithms Experiment Conclusions

4
2 Introduction

5
Introduction Characteristics of problem to solve: Long time horizons Many continuous dimensions E.g. Continuous geometry Discrete aspects No terrible outcome: reversible Geometry is not complicated: not tight => strict optimality is not crucial

6
Introduction Goal: outline an approach to design a system that can work effectively with non-determinism in the environment, with two key properties: Aggressively hierarchical Operates in continuous geometry without any discretization of the state or action spaces

7
3 Representation

8
Representation Fluents: Describe the logical aspects of domain In(O,R) : has value True if object O is entirely contained in region R, otherwise False Overlaps(O,R) : has value True if object O overlaps region R, otherwise False ClearX (R, Os) :has value True if region R is not overlapped by any object except those in the list Os, otherwise False Holding() : has value None if the robot is not grasping an object; otherwise the object being grasped Clean(O) : has value True if object O is clean and otherwise False
 : has value True if object O is entirely contained in region R, otherwise False Overlaps(O,R) : has value True if object O overlaps region R, otherwise False ClearX (R, Os) :has value True if region R is not overlapped by any object except those in the list Os, otherwise False Holding() : has value None if the robot is not grasping an object; otherwise the object being grasped Clean(O) : has value True if object O is clean and otherwise False")
9
Representation World States: a completely detailed description of both the geometric and non- geometric aspects of a situation. Goals: A goal for our planning and execution system is a set of world states, described using a conjunction of ground fluents. The goal of having object a to be clean and in the washer can be articulated as: In(a, washer) = True ^ Clean(a) = True ;
 = True ^ Clean(a) = True ;.")
10
Representation Operators: One operation is characterized by one or more operator descriptions. Define operators in a STRIPS-style form (finite domain): F(A1,….,An) = V : exists: B1,….,Bk pre: Φ1,…., Φm sideEffects: Ψ1,….., Ψ l prim: Π cost: c Abstract operator To operate in infinite domain, Suggester: to restrict domains for existential variables.
: F(A1,….,An) = V : exists: B1,….,Bk pre: Φ1,…., Φm sideEffects: Ψ1,….., Ψ l prim: Π cost: c Abstract operator To operate in infinite domain, Suggester: to restrict domains for existential variables..")
11
4 Main ideas

12
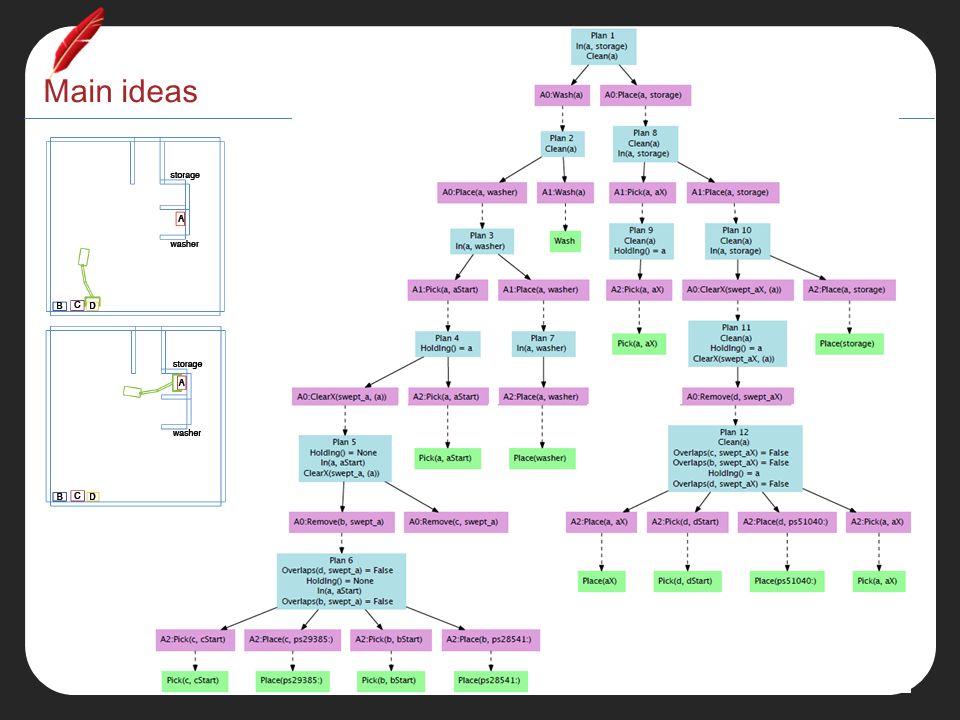
Main ideas Hierarchical structure Expand Goal to several subgoals Speed construction of planning Subgoal is an abstract operator Planning in Now Maintain left expansion of plan tree execute primitives plan as necessary Why ? To handle Non-determinism !!

13
Main ideas

17
4 Algoritms

18
Algorithms

19
4 Experiment

20
Experiment Apply HPN method to several different configurations of objects in the simple domain right Also construct a larger ‘household’ domain with 6 connected room, with random ‘junk’ objects

21
4 Conclusions

22
Conclusions Outline a general strategy for hierarchical planning and execution for task and motion planning. Very suited to re-planning approaches to stochastic domains Based on the outcome of executing a primitive, any level above this step can be replanned The potential for speedup relies on good domain-dependent choices Improvement Apply learning algorithms to improve these choices

23
T hank you

24
Q &A

Similar presentations










>")










