Download presentation
1
Design Presentation Spring 2009 Andrew Erdman Chris Sande Taoran Li

2
Problem Statement Goals Functional Requirements Model Plan of Action Schedule Risks

3
International Aerial Robotics Competition (IARC) Level 1 competition Autonomous flight Autonomous hover Navigation up to 3 km MicroCART is a long-term ongoing project
 Level 1 competition Autonomous flight Autonomous hover Navigation up to 3 km MicroCART is a long-term ongoing project")
4
Long Term Complete the requirements for IARC Level 1 Produce an autonomous helicopter Short Term Development of a Simulink model of the system Test system hardware and software

5
The aircraft should be fully autonomous The aircraft should operate without tethers The aircraft should be capable of autonomous hover at a GPS point The aircraft should be able to relay state information to a ground station The aircraft should be able to receive GPS waypoints from a ground station The aircraft should be able to be manually controlled by an operator The helicopter is not designed for flight in rain, snow, or high wind conditions

6
Mathematical model should be accurate Model should take into account flapping and thrust Model should take into account external forces

7
Virtual Reality Simulation from model Model should be user friendly

8
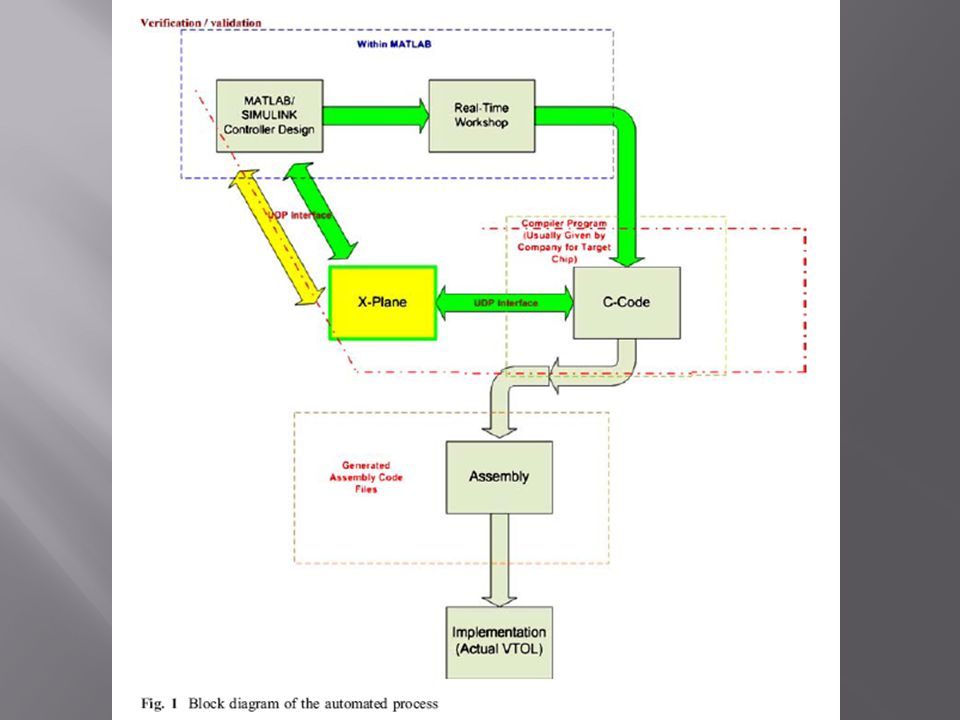
Non-linear state space equation and linearization Matlab/ Simulink to develop the model of the vehicle. C code generation based on the model Validation and implementation using X-plane software

10
Estimation of the hovering equilibrium points Finding parameters for stable hovering Simulation of the helicopter’s behavior Valuable testing tool

12
Continue with the development of the Simulink model initiated this semester Improve existing code GPS Control Test systems Flight tests Mechanical

13
Updates from GPS are available every second. Software needs to be able to interpolate between seconds and guess instantaneous position/speed more accurately. Add code to know when GPS data is reliable. Add code to convert location info to X-Y coordinates with a relative starting position. Get altitude data from GPS.

14
Need to use control constants from modeling simulation to control the aircraft. Add code to flight control software to make use of all available sensors (not just IMU). Use filtered output from sensors. Test PID values.
. Use filtered output from sensors. Test PID values..")
15
Need to locate an experienced RC helicopter pilot for live flight testing. Test craft’s capability to hover in one position. Test for ability to fly from waypoint to waypoint, starting with helicopter at altitude. Test for stability while in flight. Compare simulated data to actual data.

16
Test sensor data to look for electrical noise issues. Test cable routing to make sure no damage can occur.


















 Julio Segundo (M2-2) Nan Li (M2-3) Shanshan Ma (M2-4) Design Manager: Zack Menegakis Presentation.>")


>")

 Advisor : Matthew Nelson Anders Nelson (EE) Mathew Wymore (CprE)>")