Download presentation
Presentation is loading. Please wait.

1
Stereo matching Class 7 Read Chapter 7 of tutorial http://cat.middlebury.edu/stereo/ Tsukuba dataset

2
Stereo Standard stereo geometry Stereo matching Correlation Optimization (DP, GC) General camera configuration Rectification Plane-sweep Multi-view stereo
 General camera configuration Rectification Plane-sweep Multi-view stereo")
3
Standard stereo geometry pure translation along X-axis

4
Standard stereo geometry

5
Stereo matching Search is limited to epipolar line (1D) Look for most similar pixel ?
 Look for most similar pixel")
6
Aggregation Use more than one pixel Assume neighbors have similar disparities * Use correlation window containing pixel Allows to use SSD, ZNCC, Census, etc.

7
Compare intensities pixel-by-pixel Comparing image regions I(x,y) I´(x,y) Sum of Square Differences Dissimilarity measures
 I´(x,y) Sum of Square Differences Dissimilarity measures")
8
Compare intensities pixel-by-pixel Comparing image regions I(x,y) I´(x,y) Zero-mean Normalized Cross Correlation Similarity measures
 I´(x,y) Zero-mean Normalized Cross Correlation Similarity measures")
9
Compare intensities pixel-by-pixel Comparing image regions I(x,y) I´(x,y) Census Similarity measures 125126125 127128130 129132135 000 0 1 111 (Real-time chip from TYZX based on Census) only compare bit signature
 I´(x,y) Census Similarity measures (Real-time chip from TYZX based on Census) only compare bit signature")
10
Aggregation window sizes Small windows disparities similar more ambiguities accurate when correct Large windows larger disp. variation more discriminant often more robust use shiftable windows to deal with discontinuities (Illustration from Pascal Fua)
.")
11
Occlusions (Slide from Pascal Fua)
")
13
Real-time stereo on GPU Computes Sum-of-Square-Differences (use pixelshader) Hardware mip-map generation for aggregation over window Trade-off between small and large support window (Yang and Pollefeys, CVPR2003) 290M disparity hypothesis/sec (Radeon9800pro) e.g. 512x512x36disparities at 30Hz GPU is great for vision too!

14
Exploiting scene constraints

15
Ordering constraint 1 2 3 4,5 6 1 2,3 4 5 6 2 1 3 4,5 6 1 2,3 4 5 6 surface slice surface as a path occlusion right occlusion left

16
Uniqueness constraint In an image pair each pixel has at most one corresponding pixel In general one corresponding pixel In case of occlusion there is none

17
Disparity constraint surface slice surface as a path bounding box disparity band use reconstructed features to determine bounding box constant disparity surfaces

18
Stereo matching Optimal path (dynamic programming ) Similarity measure (SSD or NCC) Constraints epipolar ordering uniqueness disparity limit Trade-off Matching cost (data) Discontinuities (prior) Consider all paths that satisfy the constraints pick best using dynamic programming
 Similarity measure (SSD or NCC) Constraints epipolar ordering uniqueness disparity limit Trade-off Matching cost (data) Discontinuities (prior) Consider all paths that satisfy the constraints pick best using dynamic programming")
19
Hierarchical stereo matching Downsampling (Gaussian pyramid) Disparity propagation Allows faster computation Deals with large disparity ranges
 Disparity propagation Allows faster computation Deals with large disparity ranges")
20
Disparity map image I(x,y) image I´(x´,y´) Disparity map D(x,y) (x´,y´)=(x+D(x,y),y)
 image I´(x´,y´) Disparity map D(x,y) (x´,y´)=(x+D(x,y),y)")
21
Example: reconstruct image from neighboring images

23
Energy minimization (Slide from Pascal Fua)
")
24
Graph Cut (Slide from Pascal Fua) (general formulation requires multi-way cut!)
 (general formulation requires multi-way cut!)")
25
(Boykov et al ICCV‘99) (Roy and Cox ICCV‘98) Simplified graph cut
 (Roy and Cox ICCV‘98) Simplified graph cut")
27
Stereo matching with general camera configuration

28
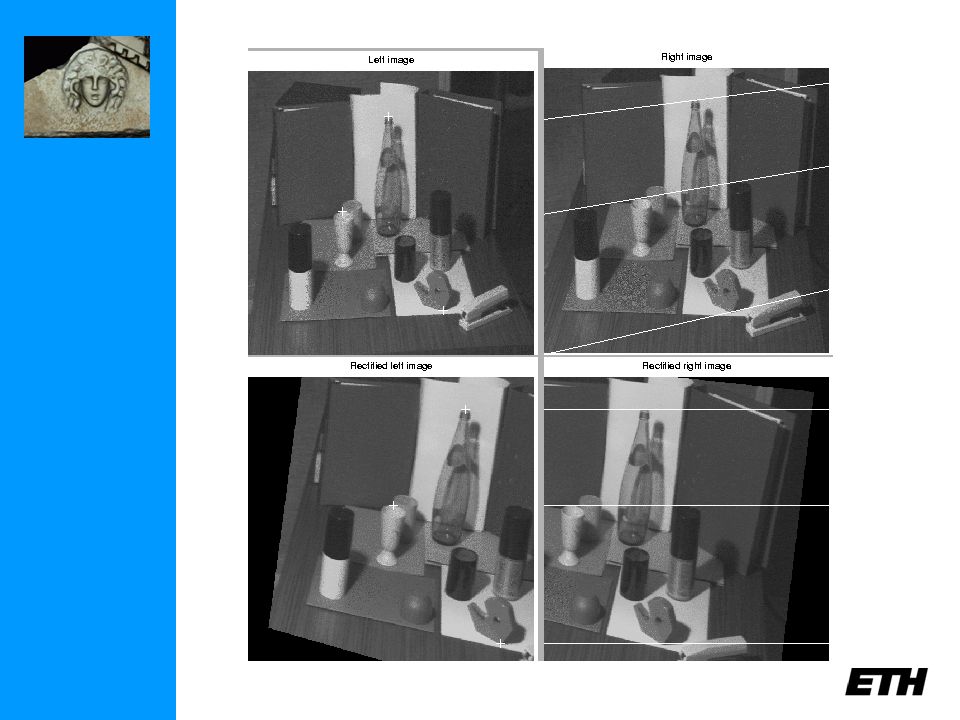
Image pair rectification

29
Planar rectification Bring two views to standard stereo setup (moves epipole to ) (not possible when in/close to image) ~ image size (calibrated) Distortion minimization (uncalibrated)
 (not possible when in/close to image) ~ image size (calibrated) Distortion minimization (uncalibrated)")
31
Polar re-parameterization around epipoles Requires only (oriented) epipolar geometry Preserve length of epipolar lines Choose so that no pixels are compressed original image rectified image Polar rectification (Pollefeys et al. ICCV’99) Works for all relative motions Guarantees minimal image size
 Works for all relative motions Guarantees minimal image size.")
32
polar rectification planar rectification original image pair

33
Example: Béguinage of Leuven Does not work with standard Homography-based approaches

34
Example: Béguinage of Leuven

35
General iso-disparity surfaces ( Pollefeys and Sinha, ECCV’04) Example: polar rectification preserves disp. Application: Active vision Also interesting relation to human horopter

36
Stereo camera configurations (Slide from Pascal Fua)
")
37
Multi-camera configurations Okutami and Kanade (illustration from Pascal Fua)
")
38
Multi-view depth fusion Compute depth for every pixel of reference image Triangulation Use multiple views Up- and down sequence Use Kalman filter (Koch, Pollefeys and Van Gool. ECCV‘98) Allows to compute robust texture
 Allows to compute robust texture.")
39
Plane-sweep multi-view matching Simple algorithm for multiple cameras no rectification necessary doesn’t deal with occlusions Collins’96; Roy and Cox’98 (GC); Yang et al.’02/’03 (GPU)
; Yang et al.’02/’03 (GPU)")
40
Space Carving

41
3D Reconstruction from Calibrated Images Scene Volume V Input Images (Calibrated) Goal: Determine transparency, radiance of points in V
 Goal: Determine transparency, radiance of points in V")
42
Discrete Formulation: Voxel Coloring Discretized Scene Volume Input Images (Calibrated) Goal: Assign RGBA values to voxels in V photo-consistent with images
 Goal: Assign RGBA values to voxels in V photo-consistent with images")
43
Complexity and Computability Discretized Scene Volume N voxels C colors 3 All Scenes ( C N 3 ) Photo-Consistent Scenes True Scene
 Photo-Consistent Scenes True Scene")
44
Issues Theoretical Questions Identify class of all photo-consistent scenes Practical Questions How do we compute photo-consistent models?

45
1. C=2 (silhouettes) Volume intersection [Martin 81, Szeliski 93] 2. C unconstrained, viewpoint constraints Voxel coloring algorithm [Seitz & Dyer 97] 3. General Case Space carving [Kutulakos & Seitz 98] Voxel Coloring Solutions
![1. C=2 (silhouettes) Volume intersection [Martin 81, Szeliski 93] 2.](http://images.slideplayer.com/12/3466123/slides/slide_45.jpg "C unconstrained, viewpoint constraints Voxel coloring algorithm [Seitz & Dyer 97] 3. General Case Space carving [Kutulakos & Seitz 98] Voxel Coloring Solutions.")
46
Reconstruction from Silhouettes (C = 2) Binary Images Approach: Backproject each silhouette Intersect backprojected volumes
 Binary Images Approach: Backproject each silhouette Intersect backprojected volumes")
47
Volume Intersection Reconstruction Contains the True Scene But is generally not the same In the limit get visual hull Complement of all lines that don’t intersect S

48
Voxel Algorithm for Volume Intersection Color voxel black if on silhouette in every image O(MN 3 ), for M images, N 3 voxels Don’t have to search 2 N 3 possible scenes!
, for M images, N 3 voxels Don’t have to search 2 N 3 possible scenes!")
49
Properties of Volume Intersection Pros Easy to implement, fast Accelerated via octrees [Szeliski 1993] Cons No concavities Reconstruction is not photo-consistent Requires identification of silhouettes
![Properties of Volume Intersection Pros Easy to implement, fast Accelerated via octrees [Szeliski 1993] Cons No concavities Reconstruction is not photo-consistent Requires identification of silhouettes](http://images.slideplayer.com/12/3466123/slides/slide_49.jpg "Properties of Volume Intersection Pros Easy to implement, fast Accelerated via octrees [Szeliski 1993] Cons No concavities Reconstruction is not photo-consistent Requires identification of silhouettes")
50
1. C=2 (silhouettes) Volume intersection [Martin 81, Szeliski 93] 2. C unconstrained, viewpoint constraints Voxel coloring algorithm [Seitz & Dyer 97] 3. General Case Space carving [Kutulakos & Seitz 98] Voxel Coloring Solutions
![1. C=2 (silhouettes) Volume intersection [Martin 81, Szeliski 93] 2.](http://images.slideplayer.com/12/3466123/slides/slide_50.jpg "C unconstrained, viewpoint constraints Voxel coloring algorithm [Seitz & Dyer 97] 3. General Case Space carving [Kutulakos & Seitz 98] Voxel Coloring Solutions.")
51
1. Choose voxel 2. Project and correlate 3. Color if consistent Voxel Coloring Approach Visibility Problem: in which images is each voxel visible?

52
The Global Visibility Problem Inverse Visibility known images Unknown Scene Which points are visible in which images? Known Scene Forward Visibility known scene

53
Layers Depth Ordering: visit occluders first! SceneTraversal Condition: depth order is view-independent

54
Panoramic Depth Ordering Cameras oriented in many different directions Planar depth ordering does not apply

55
Panoramic Depth Ordering Layers radiate outwards from cameras

56
Panoramic Layering Layers radiate outwards from cameras

57
Panoramic Layering Layers radiate outwards from cameras

58
Compatible Camera Configurations Depth-Order Constraint Scene outside convex hull of camera centers Outward-Looking cameras inside scene Inward-Looking cameras above scene

59
Calibrated Image Acquisition Calibrated Turntable 360° rotation (21 images) Selected Dinosaur Images Selected Flower Images
 Selected Dinosaur Images Selected Flower Images")
60
Voxel Coloring Results (Video) Dinosaur Reconstruction 72 K voxels colored 7.6 M voxels tested 7 min. to compute on a 250MHz SGI Flower Reconstruction 70 K voxels colored 7.6 M voxels tested 7 min. to compute on a 250MHz SGI

61
Limitations of Depth Ordering A view-independent depth order may not exist pq Need more powerful general-case algorithms Unconstrained camera positions Unconstrained scene geometry/topology

62
1. C=2 (silhouettes) Volume intersection [Martin 81, Szeliski 93] 2. C unconstrained, viewpoint constraints Voxel coloring algorithm [Seitz & Dyer 97] 3. General Case Space carving [Kutulakos & Seitz 98] Voxel Coloring Solutions
![1. C=2 (silhouettes) Volume intersection [Martin 81, Szeliski 93] 2.](http://images.slideplayer.com/12/3466123/slides/slide_62.jpg "C unconstrained, viewpoint constraints Voxel coloring algorithm [Seitz & Dyer 97] 3. General Case Space carving [Kutulakos & Seitz 98] Voxel Coloring Solutions.")
63
Space Carving Algorithm Image 1 Image N …... Initialize to a volume V containing the true scene Repeat until convergence Choose a voxel on the current surface Carve if not photo-consistent Project to visible input images

64
Convergence Consistency Property The resulting shape is photo-consistent all inconsistent points are removed Convergence Property Carving converges to a non-empty shape a point on the true scene is never removed V’ V p

65
What is Computable? The Photo Hull is the UNION of all photo-consistent scenes in V It is a photo-consistent scene reconstruction Tightest possible bound on the true scene Computable via provable Space Carving Algorithm True Scene V Photo Hull V

66
Space Carving Algorithm The Basic Algorithm is Unwieldy Complex update procedure Alternative: Multi-Pass Plane Sweep Efficient, can use texture-mapping hardware Converges quickly in practice Easy to implement

67
Space Carving Algorithm Step 1: Initialize V to volume containing true scene Step 2: For every voxel on surface of V test photo-consistency of voxel if voxel is inconsistent, carve it Step 3: Repeat Step 2 until all voxels consistent Convergence: Always converges to a photo-consistent model (when all assumptions are met) Good results on difficult real-world scenes
 Good results on difficult real-world scenes")
68
Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence True SceneReconstruction

69
Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence

70
Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence

71
Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence

72
Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence

73
Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence

74
Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence

75
Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence

76
Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence

77
Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence

78
Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence

79
Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence

80
Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence

81
Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence

82
Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence

83
Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence

84
Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence

85
Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence

86
Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence

87
Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence

88
Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence

89
Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence

90
Space Carving Results: African Violet Input Image (1 of 45) Reconstruction ReconstructionReconstruction
 Reconstruction ReconstructionReconstruction")
91
Space Carving Results: Hand Input Image (1 of 100) Views of Reconstruction
 Views of Reconstruction")
92
Other Features Coarse-to-fine Reconstruction Represent scene as octree Reconstruct low-res model first, then refine Hardware-Acceleration Use texture-mapping to compute voxel projections Process voxels an entire plane at a time Limitations Need to acquire calibrated images Restriction to simple radiance models Bias toward maximal (fat) reconstructions Transparency not supported
 reconstructions Transparency not supported")
94
voxel occluded Probalistic Space Carving Broadhurst et al. ICCV’01

95
Bayesian The Master's Lodge Image Sequence

96
I Light Intensity Object Color N Normal vector L Lighting vector V View Vector R Reflection vector color of the light Diffuse color Saturation point 0 1 1 1 Reflected Light in RGB color space Dielectric Materials (such as plastic and glass) Space-carving for specular surfaces (Yang, Pollefeys & Welch 2003) Extended photoconsistency:
 Space-carving for specular surfaces (Yang, Pollefeys & Welch 2003) Extended photoconsistency:")
97
Experiment

98
Animated Views Our result

99
Other Approaches Level-Set Methods [Faugeras & Keriven 1998] Evolve implicit function by solving PDE’s
![Other Approaches Level-Set Methods [Faugeras & Keriven 1998] Evolve implicit function by solving PDE’s](http://images.slideplayer.com/12/3466123/slides/slide_99.jpg "Other Approaches Level-Set Methods [Faugeras & Keriven 1998] Evolve implicit function by solving PDE’s")
100
Graph-cut-based approach Refine using surface evolution e.g. [Sinha et al. ICCV07]
![Graph-cut-based approach Refine using surface evolution e.g. [Sinha et al. ICCV07]](http://images.slideplayer.com/12/3466123/slides/slide_100.jpg "Graph-cut-based approach Refine using surface evolution e.g. [Sinha et al. ICCV07]")
101
Interesting comparison of multi- view stereo approaches http://vision.middlebury.edu/mview/

102
Next class: structured light and active scanning

Similar presentations







!!>")















