Download presentation
Presentation is loading. Please wait.

1
Synchronized Multi-character Motion Editing Manmyung Kim, Kyunglyul Hyun, Jongmin Kim, Jehee Lee Seoul National University

2
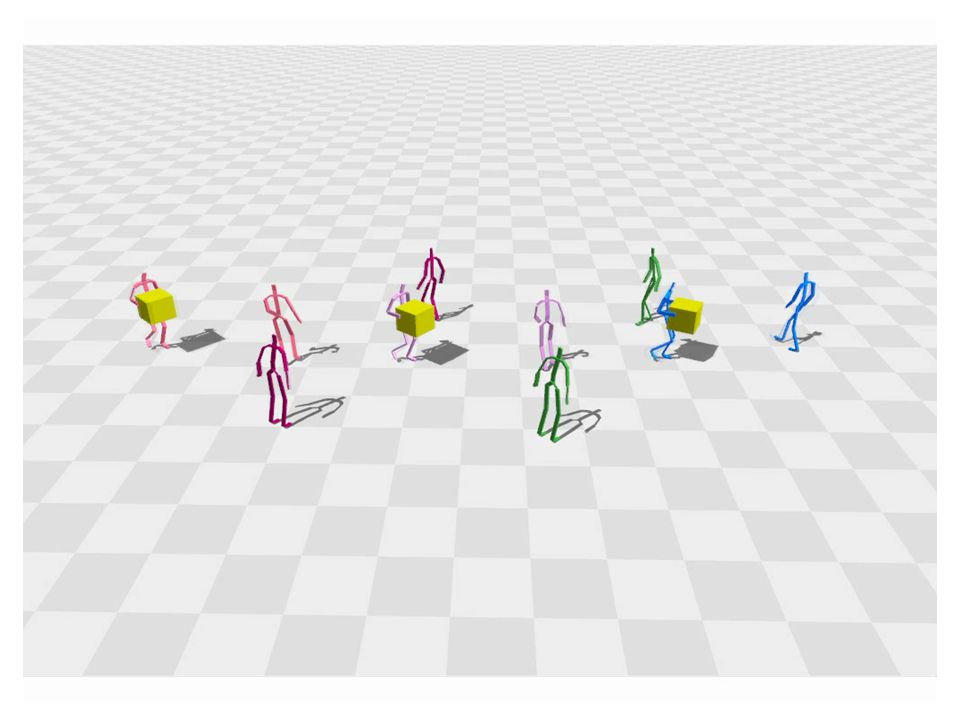
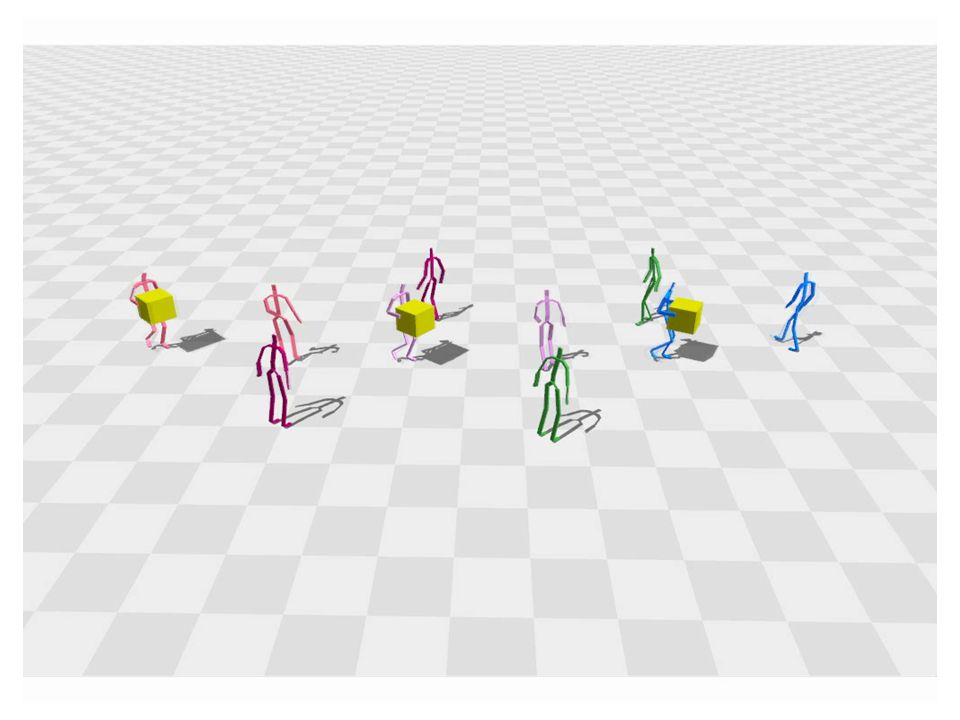
Multi-character Interaction : synchronization in space and time

3
Cumbersome to Maintain Synchronization

4
Edit while Maintaining Multiple Character Interaction

5
Related Work A hierarchical approach to interactive motion editing for human-like figures. LEE, SIGGRAPH 99. Continuous motion editing – make a smooth change to the motion to satisfy user-specified constraints

6
Related Work A hierarchical approach to interactive motion editing for human-like figures. LEE, SIGGRAPH 99. Motion path editing. GLEICHER, I3D 2001. Continuous motion editing – make a smooth change to the motion to satisfy user-specified constraints

7
Related Work Interactive control of avatars animated with human motion data. LEE, SIGGRAPH 2002. Motion Graphs KOVAR, SIGGRAPH 2002. Structural motion synthesis – splice motion segments to synthesize a novel motion sequence

8
Related Work Group Motion Editing. Kwon, SIGGRAPH 2008. Group Motion Editing – the locomotion of pedestrians

9
Overview Multiple character interaction Interactive motion path manipulation Handling large deformation

10
Overview Multiple character interaction Interactive motion path manipulation Handling large deformation

11
Overview Multiple character interaction Interactive motion path manipulation Handling large deformation

12
Multiple Character Interaction

13
Pinning position

14
Multiple Character Interaction Pinning position Pinning direction

15
Multiple Character Interaction Pinning position Pinning direction Relative postion & direction

16
Multiple Character Interaction Pinning position Pinning direction Relative postion & direction Variational relative

17
Multiple Character Interaction Pinning position Pinning direction Relative postion & direction Variational relative End-effector

18
Multiple Character Interaction Pinning position Pinning direction Relative postion & direction Variational relative End-effector

19
Multiple Character Interaction Pinning position Pinning direction Relative postion & direction Variational relative End-effector Absolute time

20
Multiple Character Interaction Pinning position Pinning direction Relative postion & direction Variational relative End-effector Absolute time Synchronization

21
Multiple Character Interaction Variational relative Pinning position Pinning direction Absolute time End-effector Synchronization Relative postion & direction Formulated as linear equations

22
Absolute Position, Direction, and Timing

24
Relative Position, Direction, and Timing

26
End-effector Constraints

27
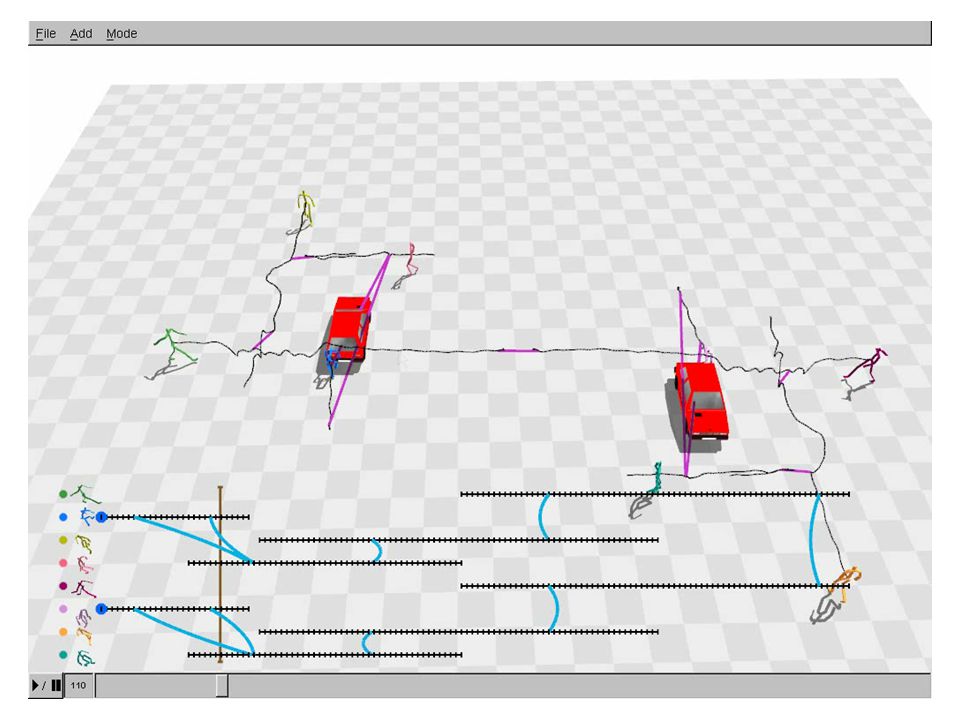
Motion Path Editing Based on Laplacian mesh editing [Igarash 2005; Sorkine 2004] – deform curve in as-rigid-as possible manner Linear least squares problems : efficient
![Motion Path Editing Based on Laplacian mesh editing [Igarash 2005; Sorkine 2004] – deform curve in as-rigid-as possible manner Linear least squares problems : efficient](http://images.slideplayer.com/12/3431850/slides/slide_27.jpg "Motion Path Editing Based on Laplacian mesh editing [Igarash 2005; Sorkine 2004] – deform curve in as-rigid-as possible manner Linear least squares problems : efficient")
28
Applying Laplacian formulation to Motion Path Project root trajectory onto the ground

29
Applying Laplacian formulation to Motion Path Project root trajectory onto the ground Define the direction by tangent and normal vectors Tangent Vector Normal Vector

30
Handling Degenerate Cases : Stationary path Stationary motion tends to stretch unrealistically Treat stationary portion as rigid segment using hard constraints Treat as rigid segment Stretch unrealistically

31
Handling Degenerate Cases : Stationary path Stationary motion tends to stretch unrealistically Treat stationary portion as rigid segment using hard constraints Treat as rigid segment Stretch unrealistically

32
Handling Degenerate Cases : Tangent Flipping Small deformation could flip tangent directions

33
Handling Degenerate Cases : Tangent Flipping Small deformation could flip tangent directions

34
Handling Degenerate Cases : Tangent Flipping Small deformation cause a tangent direction to flip Determine new tangent vector by linear interpolation Tangent interpolation Tangent flipping

35
Post-processing touch-up End-effector constraints involve non-linear equations : iterative inverse kinematics solver Pragmatic solution : Motion path editing IK-based refinement Full-body Refinement

36
Time Warping Smooth time-warp to meet timing constraints Absolute time Synchronization

37
Time Warping Smooth time-warp to meet timing constraints Absolute time Synchronization User Manipulation

38
Time Warping Smooth time-warp to meet timing constraints Timeline and spatial path are motion curves − the same Laplacian curve editing method

39
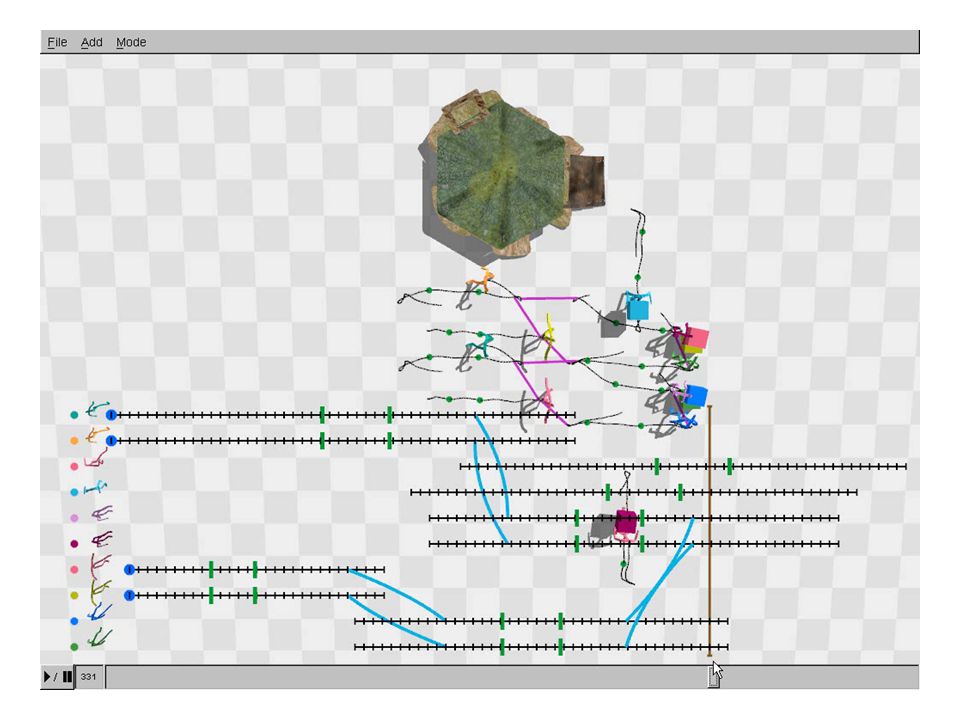
Handling Large Deformation Only Laplacian path editing Laplacian path editing Discrete motion editing

40
Handling Large Deformation Only Laplacian path editing Laplacian path editing Discrete motion editing

41
Motion graph − identify similar frames and create transitions Discrete Transformations

42
Motion graph − identify similar frames and create transitions There are exponentially many sequences of discrete transformations − structurally-varied motion path Discrete Transformations

43
Interactive editing is inherently incremental − motion path change gradually Incremental Change

44
Interactive editing is inherently incremental − motion path change gradually Three local transformations : delete, insert, replace − interactive performance & predictable control Incremental Change

46
Deletion Types of Discrete Transformation

47
Deletion Types of Discrete Transformation

48
Insertion Types of Discrete Transformation

49
Replacement Types of Discrete Transformation

50
Evaluation of Discrete Transformation E = E spatial E temporal E penalty E spatial : spatial deformation energy E temporal : temporal deformation energy E penalty : penalize lengthening and shortening of motion path Evaluate deformation energy of Laplacian path editing to meet user constraints

51
Evaluation and Selection

53
Our Algorithm Update user constraints

54
Enumerate all possible transformations Our Algorithm

55
Update user constraints Enumerate all possible transformations Evaluate each transformation to select the best Our Algorithm

56
Update user constraints Enumerate all possible transformations Evaluate each transformation to select the best Laplacian path editing Our Algorithm

57
Update user constraints Enumerate all possible transformations Evaluate each transformation to select the best Laplacian path editing Full-body refinement Deformed motions Our Algorithm

58
Update user constraints Deformed motions Enumerate all possible transformations Evaluate each transformation to select the best Laplacian path editing Full-body refinement Our Algorithm

59
Update user constraints Deformed motions Enumerate all possible transformations Evaluate each transformation to select the best Laplacian path editing Full-body refinement Performace bottleneck Our Algorithm

60
Pruning Discrete Transformations Prune transformations for interactive performance – Duration

61
Pruning Discrete Transformations Prune transformations for interactive performance – Duration – Enclosing

62
Pruning Discrete Transformations Prune transformations for interactive performance – Duration – Enclosing – Constraints Deletion

63
Subsampling Acceleration Technique For each discrete transformation, we evaluate its energy by solving Laplacian equations Subsample motion paths in evaluating its deformation energy Subsampling ratio is sparse such as 125

73
Discussion Contribution – – a unified formulation of space, time, interaction – – combining continuous and discrete motion editing – – intuitive interface

74
Discussion Contribution – – a unified formulation of space, time, interaction – – combining continuous and discrete motion editing – – intuitive interface Future works – – handling 3D motion path – – non-linear constraints

75
Synchronized Multi-character Motion Editing Manmyung Kim, Kyunglyul Hyun, Jongmin Kim, Jehee Lee

Similar presentations















 By Agata Przybyszewska.>")




>")



![Motion Editing and Retargetting Jinxiang Chai. Outline Motion editing [video, click here]here Motion retargeting [video, click here]here.](/15/4859458/big_thumb.jpg "Motion Editing and Retargetting Jinxiang Chai. Outline Motion editing [video, click here]here Motion retargeting [video, click here]here.>")
 Maneesh Agrawal (University.>")


