Download presentation
Presentation is loading. Please wait.

1
(t,x) domain, pattern-based ground roll removal Morgan P. Brown* and Robert G. Clapp Stanford Exploration Project Stanford University

2
Receiver lines from 3-D cross-spread Shot Gather

3
Ground Roll - what is it? To first order: Rayleigh (SV) wave. Dispersive, often high-amplitude In (t,x,y), ground roll = cone. Usually spatially aliased. In practice, “ground roll cone” muted.
, ground roll = cone. Usually spatially aliased. In practice, ground roll cone muted..")
4
Motivation for advanced separation techniques. Model-based signal/noise separation. Non-stationary (t,x) PEF. Least squares signal estimation. Real Data results. Talk Outline
 PEF. Least squares signal estimation. Real Data results. Talk Outline.")
5
Advanced Separation techniques…why bother? Imaging/velocity estimation for deep targets. Rock property inversion (AVO, impedance). Single-sensor configurations.
. Single-sensor configurations..")
6
Amplitude-preservation. Robustness to signal/noise overlap. Robustness to spatially aliased noise. Signal/Noise Separation: an Algorithm wish-list

7
Motivation for advanced separation techniques. Model-based signal/noise separation. Non-stationary (t,x) PEF. Least squares signal estimation. Real Data results. Talk Outline
 PEF. Least squares signal estimation. Real Data results. Talk Outline.")
8
Coherent Noise Separation - a “model-based” approach Noise Subtraction simple subtraction adaptive subtraction pattern-based subtraction “Signal Processing” step data = signal + noise Noise Modeling moveout-based frequency-based “Physics” step Wiener Optimal Estimation

9
Coherent Noise Subtraction The Noise model: kinematics usually OK, amplitudes distorted. Simple subtraction inferior. Adaptive subtraction: mishandles crossing events, requires unknown source wavelet. Wiener optimal signal estimation.

10
Wiener Optimal Estimation Assume: data = signal + noise signal, noise uncorrelated signal, noise spectra known. Optimal Reconstruction filter

11
Question: How to estimate the non-stationary spectra of unknown signal and noise? PEF, data have inverse spectra. Spectral Estimation Answer: Smoothly non-stationary (t,x) Prediction Error Filter (PEF).
 Prediction Error Filter (PEF)..")
12
Question: How to estimate the non-stationary spectra of unknown signal and noise? Wiener technique requires signal PEF and noise PEF. Spectral Estimation Answer: Smoothly non-stationary (t,x) Prediction Error Filter (PEF).
 Prediction Error Filter (PEF)..")
13
Motivation for advanced separation techniques. Model-based signal/noise separation. Non-stationary (t,x) PEF. Least squares signal estimation. Real Data results. Talk Outline
 PEF. Least squares signal estimation. Real Data results. Talk Outline.")
14
Helix Transform and multidimensional filtering x t Data = Helix Transform 1a4a4 a1a1 a3a3 a2a2... NtNt N t x N x trace 1trace 2trace N x... x 1a3a3 a1a1 a4a4 a2a2 PEF = t

15
Helix Transform and multidimensional filtering 1a3a3 a1a1 a4a4 a2a2 * 1a4a4 a1a1 a3a3 a2a2... trace 1trace 2trace N x... *

16
Why use the Helix Transform? 2-D PEF Helix Transform 1-D PEF 1-D Decon (Backsubstitution) Stable Inverse PEF 1-D filtering toolbox directly applicable to multi-dimensional problems.
 Stable Inverse PEF 1-D filtering toolbox directly applicable to multi-dimensional problems..")
17
Convolution with stationary PEF 1 a 1 … a 2 a 3 a 4 N t x N x trace 1 trace 2 trace N x... N t x N x x Convolution Matrix

18
Convolution with smoothly non-stationary PEF 1 a 1,1 … a 1,2 a 1,3 a 1,4 1 a 2,1 … a 2,2 a 2,3 a 2,4 1 a m-1,1 … a m-1,2 a m-1,3 a m-1,4 1 a m,1 … a m,1 a m,3 a m,4 N t x N x trace 1 trace 2 trace N x... N t x N x x Convolution Matrix Up to m = N t x N x separate filters.

19
Smoothly Non-Stationary (t,x) PEF - Pro and Con Robust for spatially aliased data. Handles missing/corrupt data. No explicit patches (gates). Stability not guaranteed.
. Stability not guaranteed..")
20
Estimating the Noise PEF Small phase errors. Amplitude difference OK. Noise model requirements: Noise model = Lowpass filter( data ) Noise model = training data
 Noise model = training data.")
21
Estimating the Noise PEF Noise model: Unknown PEF: Via CG iteration “Fitting goal” notation:

22
Estimating the Noise PEF Problem often underdetermined. Apply regularization.

23
Estimating the Noise PEF Problem often underdetermined. Apply regularization.

24
Estimating the Signal PEF Given Noise PEF: Data PEF: Obtain Signal PEF: by deconvolution Use Spitz approach, only in (t,x) Reference: 1/99 TLE, 99/00 SEG
 Reference: 1/99 TLE, 99/00 SEG")
25
Motivation for advanced separation techniques. Model-based signal/noise separation. Non-stationary (t,x) PEF. Least squares signal estimation. Real Data results. Talk Outline
 PEF. Least squares signal estimation. Real Data results. Talk Outline.")
26
Estimating the Unknown Signal Noise: Signal: Data: Noise PEF: Signal PEF: Data PEF: Regularization parameter: Apply constraint to eliminate n.

27
Estimating the Unknown Signal Noise: Signal: Data: Noise PEF: Signal PEF: Data PEF: Regularization parameter: In this form, equivalent to Wiener.

28
Noise: Signal: Data: Noise PEF: Signal PEF: Data PEF: Regularization parameter: Estimating the Unknown Signal Apply Spitz’ choice of Signal PEF.

29
Noise: Signal: Data: Noise PEF: Signal PEF: Data PEF: Regularization parameter: Estimating the Unknown Signal Apply Spitz’ choice of Signal PEF.

30
Noise: Signal: Data: Noise PEF: Signal PEF: Data PEF: Regularization parameter: Estimating the Unknown Signal Precondition with inverse of signal PEF.

31
Noise: Signal: Data: Noise PEF: Signal PEF: Data PEF: Regularization parameter: Estimating the Unknown Signal Precondition with inverse of signal PEF.

32
too small = leftover noise. too large = signal removed. Ideally, should pick = f(t,x). Estimating the Unknown Signal
. Estimating the Unknown Signal.")
33
Motivation for advanced separation techniques. Model-based signal/noise separation. Non-stationary (t,x) PEF. Least squares signal estimation. Real Data results. Talk Outline
 PEF. Least squares signal estimation. Real Data results. Talk Outline.")
34
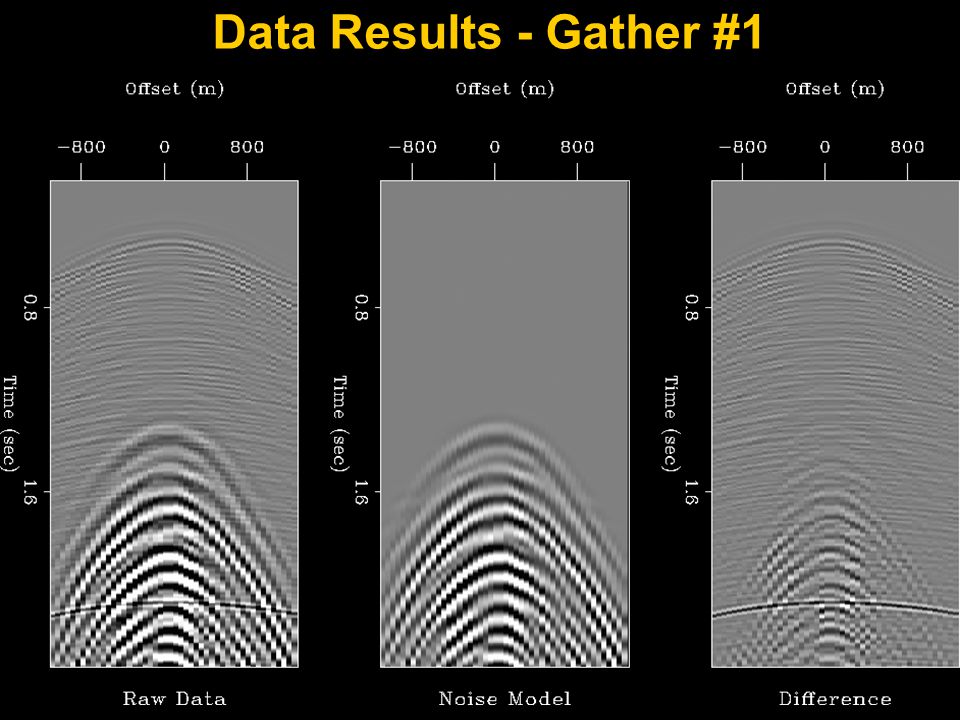
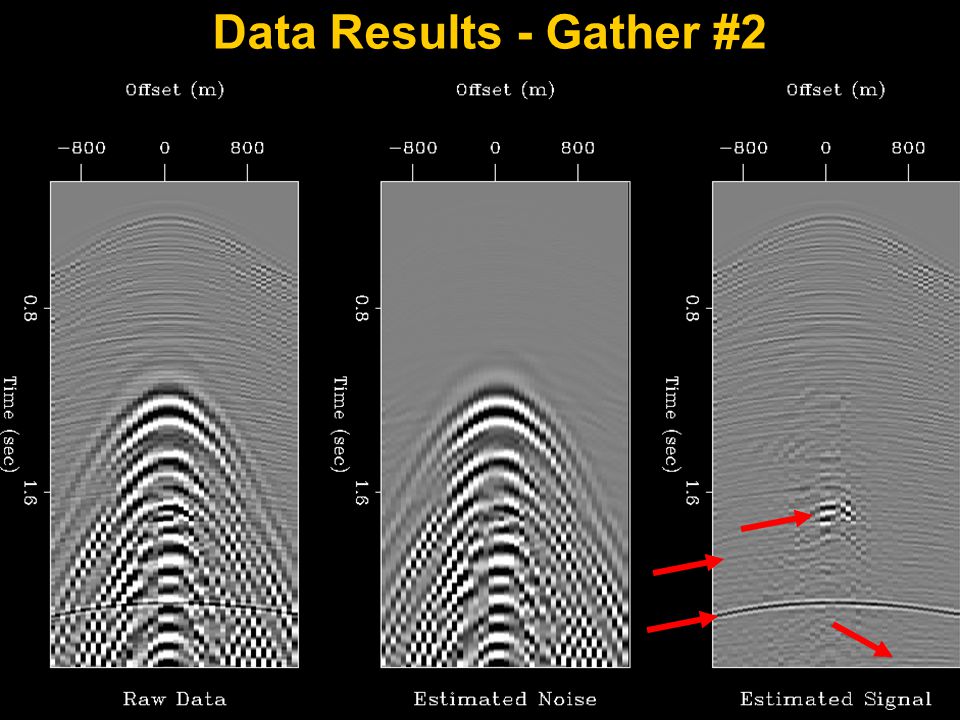
Data Specs Saudi Arabian 3-D shot gather - cross-spread acquisition. Test on three 2-D receiver lines. Strong, hyperbolic ground roll. Good separation in frequency. Noise model = 15 Hz Lowpass.

35
Data Results - Gather #1

38
Data Results - Gather #2

40
Data Results - Gather #3

42
(t,x) domain, pattern-based coherent noise removal Amplitude-preserving. Robust to signal/noise overlap. Robust to spatial aliasing. Parameter-intensive. Conclusions

43
Saudi Aramco SEP Sponsors Antoine Guitton Acknowledgements

Similar presentations



 from SRTM mission for hydrodynamic modeling and other.>")










 transformation Spatial Fourier (x k x ) transformation applications f-k x transformation Radon (-p x ) transformation.>")
 Wiener Filtering Derivation Comments Re-sampling and Re-sizing 1D 2D 10/5/06.>")





