Download presentation
Presentation is loading. Please wait.

1
Vector Calculus Mengxia Zhu Fall 2007

2
Objective Review vector arithmetic Distinguish points and vectors Relate geometric concepts to their algebraic representation Describe point, line, and planes Exploit the dot product and cross product and their applications in Graphics

3
Basic Entities Coordinate system: has an origin and some mutually perpendicular axes emanating from the origin. Point P: a location in space Vector v : with length and direction, physical entities, such as force, and velocity. Vector has no fixed location, seen as points displacement x y z z x y Left-hand system Right-hand system P Q V V=Q-P {2, 3, 9}

4
Vector-scalar multiplication Multiplication gives a vector Has the same direction as that of v 2.5v -v-v Vector permits two fundamental operations: add them, multiply them with real number

5
Vector addition Sum of two vectors Subtraction of two vectors Adding and subtraction of corresponding components of two vectors gives a new vector v1 v1+v2 v2 v1 v2 v1-v2 v1 v1+v2 v2 v1 v2 v1-v2

6
Linear Combination and Affine Combination A linear combination of vectors W = a 1 v 1 +a 2 v 2 + a 3 v 3 +…+a n v n: all weights are scalars. A linear combination is affine combination of vectors if the sum of all coefficients add up to unity. A convex combination poses a further restriction on affine combination. Not only must the coefficients sum to unit, but each must also be non-negative

7
Linear Combination of Vectors The combination is Convex if the coefficients sum to 1, and are not negative. Partition of unit v1v1 v2v2 v =(1- a)v 1 + a v 2 = V1+a(V2-V1) v1v1 v2v2 v3v3 v = a 1 v 1 + a 2 v 2 + (1-a 1 -a 2 )v 3 a(V2-V1)
v 1 + a v 2 = V1+a(V2-V1) v1v1 v2v2 v3v3 v = a 1 v 1 + a 2 v 2 + (1-a 1 -a 2 )v 3 a(V2-V1).")
8
Normalize a vector v is represented by n-tuple ( v 1,v 2,…v n ) Magnitude (length): the distance from the tail to the head. Normalization: Scale a vector to have a unity length, unit vector

9
Point-vector addition Subtraction of two points P and Q gives a vector v: v=P-Q Adding a vector v to point Q gives a point K: K=Q+u P Q u K v

10
Dot product Dot product between vector v and vector u gives a scalar If u and v are orthogonal, the dot product equals zero. (a1,a2) dot (b1,b2) = a1xb1 + a2xb2 The most important application of the dot product is to find the angle between two vectors or between two intersecting lines. u v
 dot (b1,b2) = a1xb1 + a2xb2 The most important application of the dot product is to find the angle between two vectors or between two intersecting lines. u v.")
11
The Angle between Two Vectors Hence, dot product varies as the cosine of the angle from u to v. u v v u v u v u

12
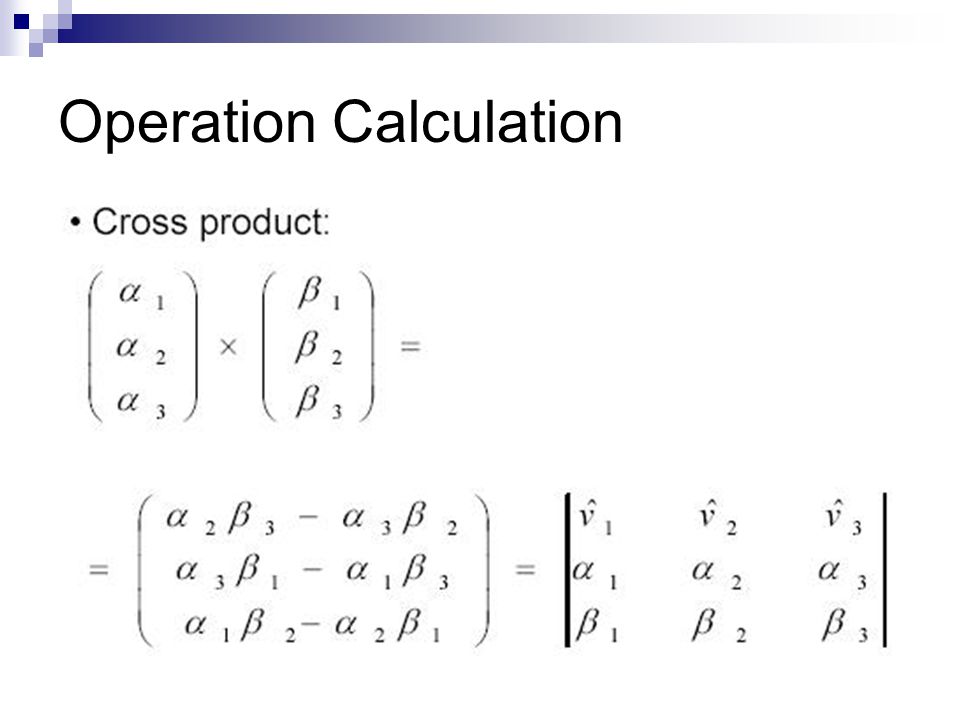
Cross Product a = (a1, a2, a3), b=(b1, b2, b3) a x b = ( a2b3 –a3b2), (a3b1-a1b3), (a1b2 – a2b1)
, b=(b1, b2, b3) a x b = ( a2b3 –a3b2), (a3b1-a1b3), (a1b2 – a2b1)")
13
Cross Product Cross product between vector v and u gives a vector n is a unit vector perpendicular to both u and v. Follow the right-hand rule u and v are parallel if The length of the cross product equals the area of the parallelogram determined by u and v v u v x u u x v

14
Operation Calculation

16
Homogeneous representation Revisit coordinate frame system Ordinary coordinate system, points and vectors are represented the same. However, they are quite different. Points have location, no direction and size. Vector has no location, but with direction and size.

17
Homogeneous representation cont Represent both points and vector using the same set of basic underlying objects, One of the hallmarks of computer graphics, keep straight the distinction between points and vectors with a compact notation. Easy to program… We view point’s location as an offset from the origin by a certain amount

18
Homogeneous representation. OpenGL uses 4D homogeneous coordinates for all its vertices. To go from ordinary to homogenous coordinates, if the object is a point, append a 1, if the object is a vector, append a 0. Point: (x,y,z,1)Vector: (x,y,z,0)
Vector: (x,y,z,0).")
19
Line A line is defined by two points. It is infinite in length and extending forever in both directions. A line segment is defined by two endpoints. A ray is semi-infinite, specified by a starting point and a direction. C B C B C B

20
Parametric Representation Line When t varies, the point P trace out all of the points on the line defined by C and B. C B t<0 t=0 t=1 t>1 L

21
Parametric Plane Heavy use of polygons in 3D graphics, planes seem to appear everywhere. Three point form Parametric representation Point normal form

22
Parametric form Equation Given any values of s and t, we can identify the corresponding point on the plane. C b a B A

23
Three point form of Plane Given three points A, B, and C. We rewrite the parametric form: Affine combination of points:

24
Point Normal form Plane can be specified by a single point B, that lies within it and direction n, normal to the plane. Normal n is perpendicular to any line lying in the plane. R is any point on the plane, it satisfies: B n

25
Tweening for Art and Animation The affine combination of points P = A(1-t) + Bt, performs a linear interpolation between the points A and B. Interesting animation can be created that show one figure being “tweened” into another. The procedure if simplest if the two figures are polylines based on the same number of points.

26
Tweening void drawTween ( Point A[], Point B[], int n, float t) { for (int i= 0; i< n; i++) { Point p; P = Tween(A[i], B[i], t); if ( i == 0 ) moveTo (Px, Py); else lineTo (Px, Py); }
![Tweening void drawTween ( Point A[], Point B[], int n, float t) { for (int i= 0; i< n; i++) { Point p; P = Tween(A[i], B[i], t); if ( i == 0 ) moveTo (Px, Py); else lineTo (Px, Py); }](http://images.slideplayer.com/12/3349610/slides/slide_26.jpg "Tweening void drawTween ( Point A[], Point B[], int n, float t) { for (int i= 0; i< n; i++) { Point p; P = Tween(A[i], B[i], t); if ( i == 0 ) moveTo (Px, Py); else lineTo (Px, Py); }")
Similar presentations