Download presentation
Presentation is loading. Please wait.

1
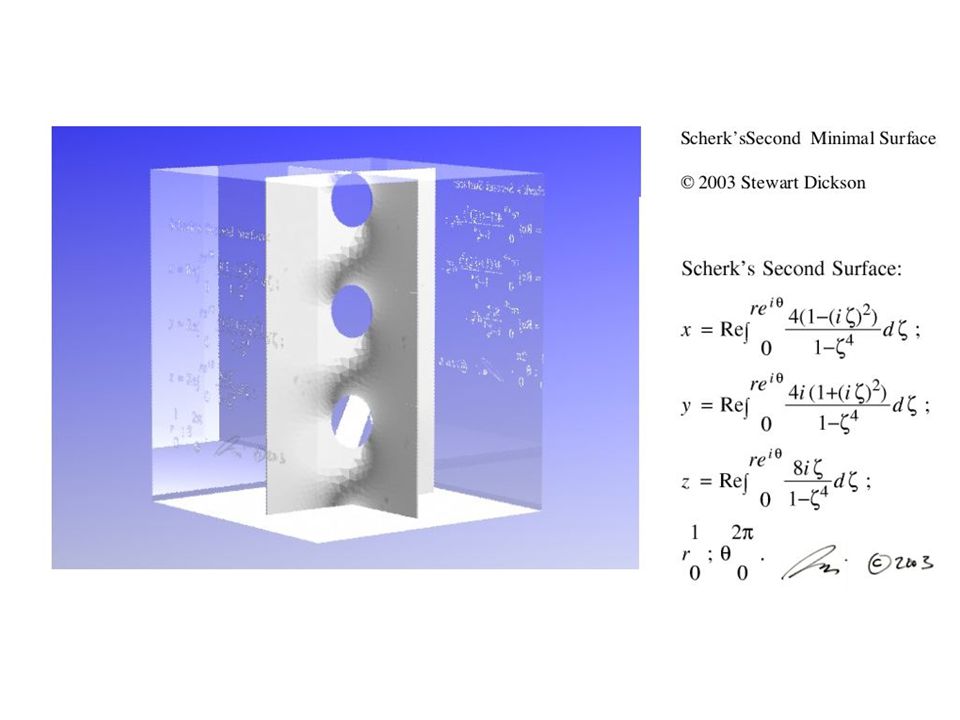
An Apparatus for Performing Real-time, Interactive Sculpture Stewart Dickson, Visualization Researcher Computer Science and Mathematics Division

2
“ What I hear I forget, What I see I remember, What I touch I understand.” -Confucius ( b. 09/28/0555 BC)
.")
3
u1[a_,b_] :=.5 (E(a + I*b) + E(- a - I*b)) u2[a_,b_] :=.5 (E(a + I*b) - E(- a - I*b)) z1k[a_,b_,n_,k_] := E(k*2*Pi*I/n)*u1[a,b](2.0/n) z2k[a_,b_,n_,k_] := E(k*2*Pi*I/n)*u2[a,b](2.0/n) {x, y, z} -> { Re[z1k[a,b,n,k1]], Re[z2k[a,b,n,k2]], Cos[alpha]*Im[z1k[a,b,n,k1]] + Sin[alpha]*Im[z2k[a,b,n,k2]]} a: (-1.0,1.0); b:(0, Pi/2); k2: (0, n - 1) k1: (0, n - 1) Tactile Mathematics is An Immediate Experience http://emsh.calarts.edu/~mathart/Zoetrope2/Zoetrope2_prop.html Calabi-Yau Manifold (with Andrew Hanson)
![u1[a_,b_] :=.5 (E(a + I*b) + E(- a - I*b)) u2[a_,b_] :=.5 (E(a + I*b) - E(- a - I*b)) z1k[a_,b_,n_,k_] := E(k*2*Pi*I/n)*u1[a,b](2.0/n) z2k[a_,b_,n_,k_] := E(k*2*Pi*I/n)*u2[a,b](2.0/n) {x, y, z} -> { Re[z1k[a,b,n,k1]], Re[z2k[a,b,n,k2]], Cos[alpha]*Im[z1k[a,b,n,k1]] + Sin[alpha]*Im[z2k[a,b,n,k2]]} a: (-1.0,1.0); b:(0, Pi/2); k2: (0, n - 1) k1: (0, n - 1) Tactile Mathematics is An Immediate Experience Calabi-Yau Manifold (with Andrew Hanson)](http://images.slideplayer.com/12/3341409/slides/slide_3.jpg "u1[a_,b_] :=.5 (E(a + I*b) + E(- a - I*b)) u2[a_,b_] :=.5 (E(a + I*b) - E(- a - I*b)) z1k[a_,b_,n_,k_] := E(k*2*Pi*I/n)*u1[a,b](2.0/n) z2k[a_,b_,n_,k_] := E(k*2*Pi*I/n)*u2[a,b](2.0/n) {x, y, z} -> { Re[z1k[a,b,n,k1]], Re[z2k[a,b,n,k2]], Cos[alpha]*Im[z1k[a,b,n,k1]] + Sin[alpha]*Im[z2k[a,b,n,k2]]} a: (-1.0,1.0); b:(0, Pi/2); k2: (0, n - 1) k1: (0, n - 1) Tactile Mathematics is An Immediate Experience Calabi-Yau Manifold (with Andrew Hanson)")
4
r1 = 1.0 r2 = 3.0 Bx [u_, v_] := (r2 + r1 * Cos[u/2.0]) * Cos[u/3.0] By [u_, v_] := (r2 + r1 * Cos[u/2.0]) * Sin[u/3.0] Bz [u_, v_] := r1 * Sin[u/2.0] x [u_, v_] := N[Bx [u, v]] + r1 * Cos[u/3.0] * Cos[v - Pi] y [u_, v_] := N[By [u, v]] + r1 * Sin[u/3.0] * Cos[v - Pi] z [u_, v_] := N[Bz [u, v]] + r1 * Sin[v - Pi] Trefoil Torus-Knot:
![r1 = 1.0 r2 = 3.0 Bx [u_, v_] := (r2 + r1 * Cos[u/2.0]) * Cos[u/3.0] By [u_, v_] := (r2 + r1 * Cos[u/2.0]) * Sin[u/3.0] Bz [u_, v_] := r1 * Sin[u/2.0] x [u_, v_] := N[Bx [u, v]] + r1 * Cos[u/3.0] * Cos[v - Pi] y [u_, v_] := N[By [u, v]] + r1 * Sin[u/3.0] * Cos[v - Pi] z [u_, v_] := N[Bz [u, v]] + r1 * Sin[v - Pi] Trefoil Torus-Knot:](http://images.slideplayer.com/12/3341409/slides/slide_4.jpg "r1 = 1.0 r2 = 3.0 Bx [u_, v_] := (r2 + r1 * Cos[u/2.0]) * Cos[u/3.0] By [u_, v_] := (r2 + r1 * Cos[u/2.0]) * Sin[u/3.0] Bz [u_, v_] := r1 * Sin[u/2.0] x [u_, v_] := N[Bx [u, v]] + r1 * Cos[u/3.0] * Cos[v - Pi] y [u_, v_] := N[By [u, v]] + r1 * Sin[u/3.0] * Cos[v - Pi] z [u_, v_] := N[Bz [u, v]] + r1 * Sin[v - Pi] Trefoil Torus-Knot:")
8
http://emsh.calarts.edu/~mathart/portfolio/CG_Bronze/CG_bronze.html

11
h tt p :/ / w w w. e ri c h a r s h b a r g e r. o r g /l e g o More Layer Manufacturing

12
http://www.swaystudio.com Honda (Element) “Purpose” Director: Roman Coppola
 Purpose Director: Roman Coppola")
13
Daniel Rozin, New York University (NYU) Shiny Balls Mirror, 2003
 Shiny Balls Mirror, 2003")
14
Daniel Rozin, New York University (NYU) Shiny Balls Mirror, 2003
 Shiny Balls Mirror, 2003")
15
http://emsh.calarts.edu/~mathart/IS99_Talk/IS99_Contents.html

16
http://www.tinialloy.com/ TiNi alloy Company’s Thin Film Shape Memory Alloy Proportionally Controlled Microvalve

17
http://emsh.calarts.edu/~mathart/IS99_Talk/IS99_Contents.html

18
Torus-Costa’s Minimal Surface Metamorphosis http://emsh.calarts.edu/~mathart/Zoetrope.html

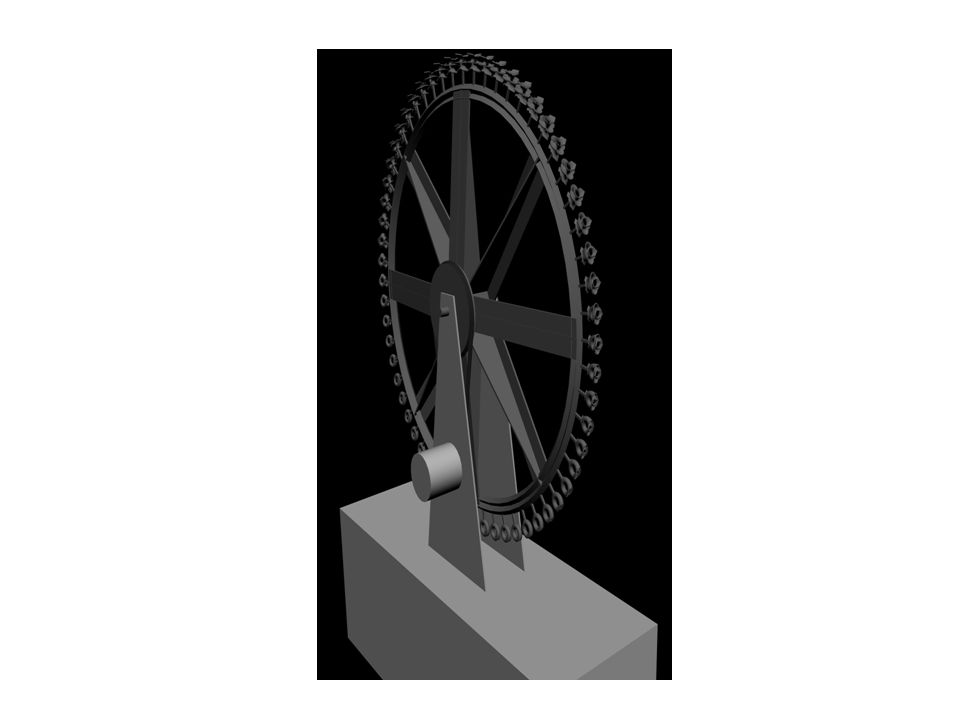
19
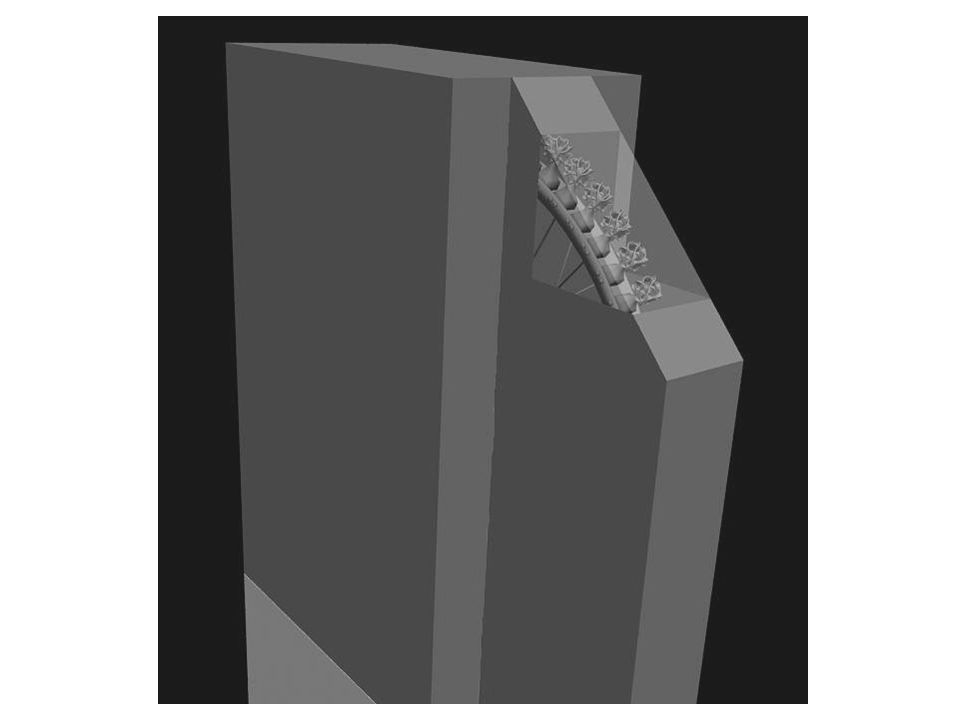
3-D Zoetrope of the Torus-Costa’s Surface Metamorphosis http://emsh.calarts.edu/~mathart/Zoetrope.html

31
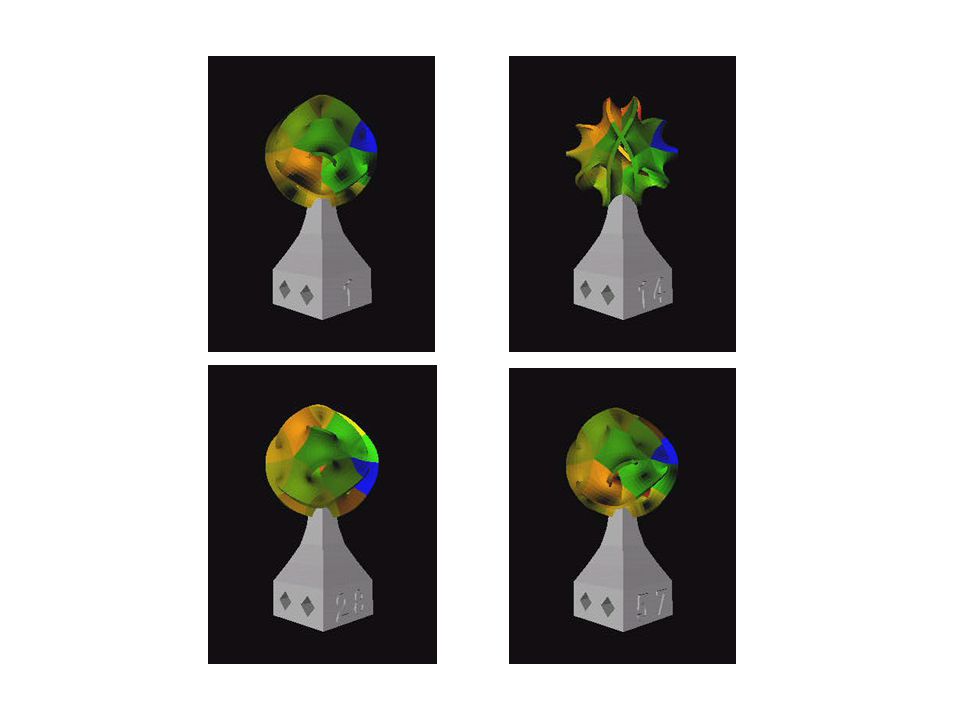
u1[a_,b_] :=.5 (E(a + I*b) + E(- a - I*b)) u2[a_,b_] :=.5 (E(a + I*b) - E(- a - I*b)) z1k[a_,b_,n_,k_] := E(k*2*Pi*I/n)*u1[a,b](2.0/n) z2k[a_,b_,n_,k_] := E(k*2*Pi*I/n)*u2[a,b](2.0/n) {x, y, z} -> { Re[z1k[a,b,n,k1]], Re[z2k[a,b,n,k2]], Cos[alpha]*Im[z1k[a,b,n,k1]] + Sin[alpha]*Im[z2k[a,b,n,k2]]} a: (-1.0,1.0); b:(0, Pi/2); k2: (0, n - 1) k1: (0, n - 1) Calabi-Yau Manifold/Fermat Surface As a Superquadric Surface Parameterized in CP4
![u1[a_,b_] :=.5 (E(a + I*b) + E(- a - I*b)) u2[a_,b_] :=.5 (E(a + I*b) - E(- a - I*b)) z1k[a_,b_,n_,k_] := E(k*2*Pi*I/n)*u1[a,b](2.0/n) z2k[a_,b_,n_,k_] := E(k*2*Pi*I/n)*u2[a,b](2.0/n) {x, y, z} -> { Re[z1k[a,b,n,k1]], Re[z2k[a,b,n,k2]], Cos[alpha]*Im[z1k[a,b,n,k1]] + Sin[alpha]*Im[z2k[a,b,n,k2]]} a: (-1.0,1.0); b:(0, Pi/2); k2: (0, n - 1) k1: (0, n - 1) Calabi-Yau Manifold/Fermat Surface As a Superquadric Surface Parameterized in CP4](http://images.slideplayer.com/12/3341409/slides/slide_31.jpg "u1[a_,b_] :=.5 (E(a + I*b) + E(- a - I*b)) u2[a_,b_] :=.5 (E(a + I*b) - E(- a - I*b)) z1k[a_,b_,n_,k_] := E(k*2*Pi*I/n)*u1[a,b](2.0/n) z2k[a_,b_,n_,k_] := E(k*2*Pi*I/n)*u2[a,b](2.0/n) {x, y, z} -> { Re[z1k[a,b,n,k1]], Re[z2k[a,b,n,k2]], Cos[alpha]*Im[z1k[a,b,n,k1]] + Sin[alpha]*Im[z2k[a,b,n,k2]]} a: (-1.0,1.0); b:(0, Pi/2); k2: (0, n - 1) k1: (0, n - 1) Calabi-Yau Manifold/Fermat Surface As a Superquadric Surface Parameterized in CP4")
36
Sachiko Kodama, Tokyo Protrude, Flow 2001

37
‘Pseudopod’ from “The Abyss” © 1989 Twentieth Century Fox

38
http://llk.media.mit.edu/projects/cricket/

39
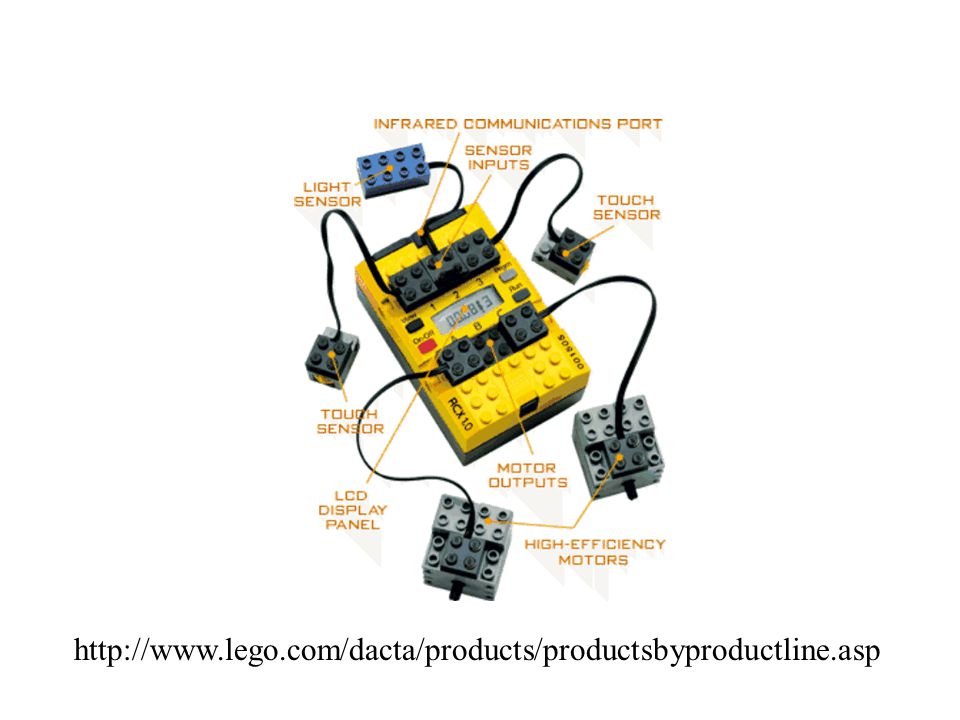
http://www.lego.com/dacta/products/productsbyproductline.asp
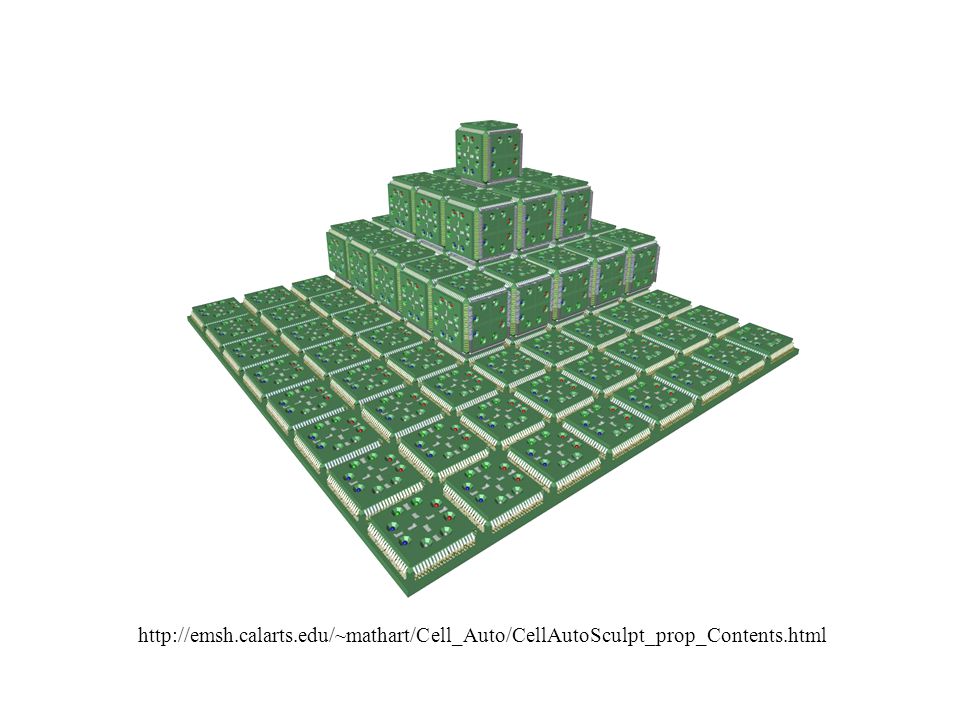
45
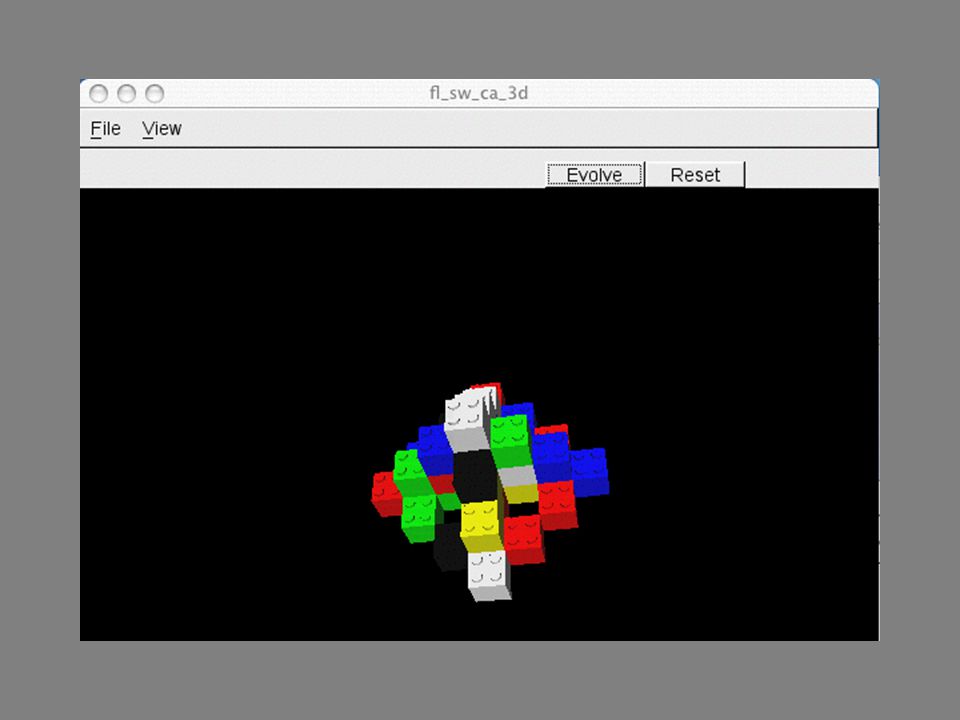
http://emsh.calarts.edu/~mathart/Cell_Auto/CellAutoSculpt_prop_Contents.html

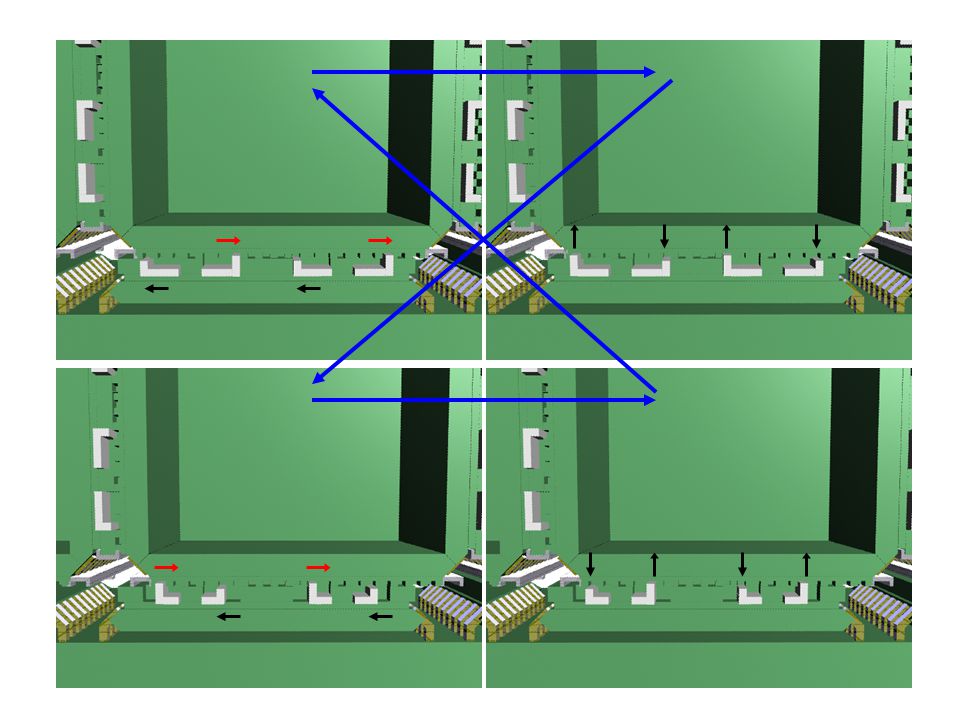
53
Stephen Wolfram 2-D Cellular Automaton -- Rule 924 “A New Kind of Science”

57
‘Pseudopod’ from “The Abyss” © 1989 Twentieth Century Fox

58
Stewart Dickson http://us.imdb.com/Name?Stewart+Dickson http://emsh.calarts.edu/~mathart http://www.cs.utk.edu/~dickson http://www.csm.ornl.gov/~dickson DicksonSP@ornl.gov Mathart@emsh.calarts.edu

Similar presentations