Download presentation
Presentation is loading. Please wait.

1
© 2009 Microsoft Corporation. All rights reserved. Automatic Verification of Heap Manipulation using Separation Logic Josh Berdine with thanks to Byron Cook, Stephen Magill, Thomas Wies SLAyer project colleagues (MSR Cambridge) Cristiano Calcagno, Dino Distefano, Peter O’Hearn, Hongseok Yang SpaceInvader & Smallfoot project colleagues (London) SOFSEM 09 January 25, 2009 TexPoint fonts used in EMF. Read the TexPoint manual before you delete this box.: A A AAA A
 Cristiano Calcagno, Dino Distefano, Peter O’Hearn, Hongseok Yang SpaceInvader & Smallfoot project colleagues (London) SOFSEM 09 January 25, 2009 TexPoint fonts used in EMF. Read the TexPoint manual before you delete this box.: A A AAA A.")
2
© 2009 Microsoft Corporation. All rights reserved. 2000’s: impressive practical advances in automatic program verification E.g.: –SLAM: Protocol properties of procedure calls in device drivers, e.g. any call to ReleaseSpinLock is preceded by a call to AquireSpinLock –ASTRÉE: no run-time errors in Airbus code However –ASTRÉE assumes: no dynamic pointer allocation –SLAM assumes: memory safety Important programs make serious use of heap memory... but heap verification is hard Maybe one day… automatically prove: –Memory safety of the operating system (kernel) –The absence of any security holes due to abuse of memory Context
 –The absence of any security holes due to abuse of memory Context.")
3
© 2009 Microsoft Corporation. All rights reserved. Heap-manipulating code –dynamic allocation & deallocation: malloc & free –pointer swing: x->Flink = y Want to know manipulation of pointers is “ok” An old challenge void filter(PSLL_ENTRY *a, int i) { PSLL_ENTRY t, *z = a; while(*z != NULL) if((*z)->Data == i) { t = *z; *z = t->Flink; free(t); } else { z = &(*z)->Flink; }
 { PSLL_ENTRY t, *z = a; while(*z != NULL) if((*z)->Data == i) { t = *z; *z = t->Flink; free(t); } else { z = &(*z)->Flink; }.")
4
© 2009 Microsoft Corporation. All rights reserved. Absence of memory errors –dereference dangling pointers –double free –leak memory Doesn’t hold code very likely doesn’t behave “as expected” Focus on pointers over arrays: “pointer safety” Other properties –data structure integrity –accesses only a constrained portion of the heap Memory safety (what does “ok” mean)
.")
5
© 2009 Microsoft Corporation. All rights reserved. Memory Safety Bug

6
© 2009 Microsoft Corporation. All rights reserved. Memory Safety Bug BlinkFlink

7
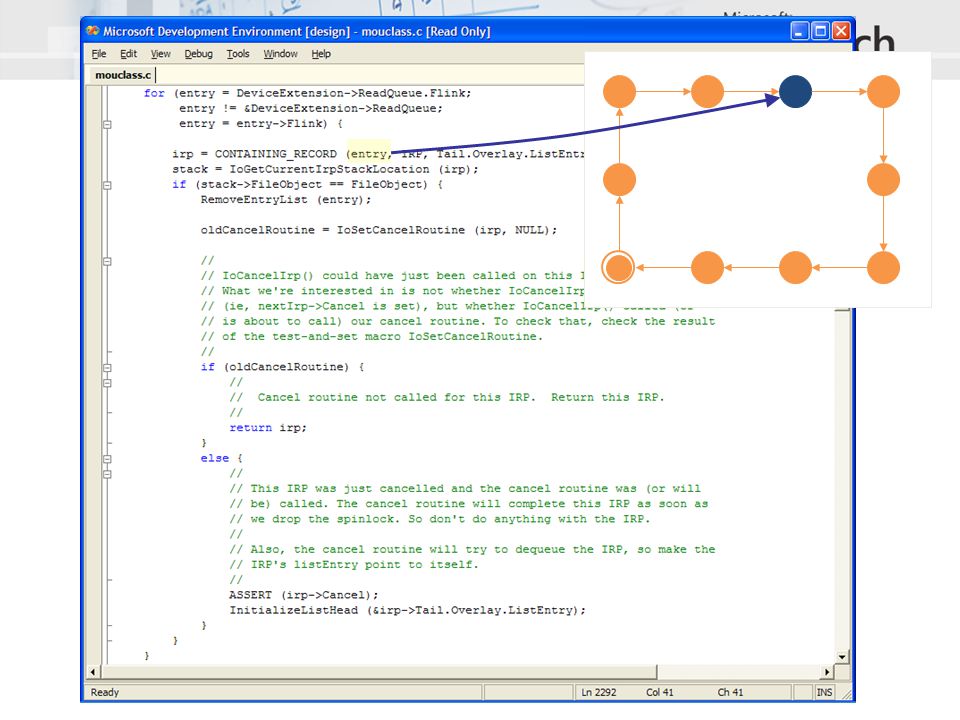
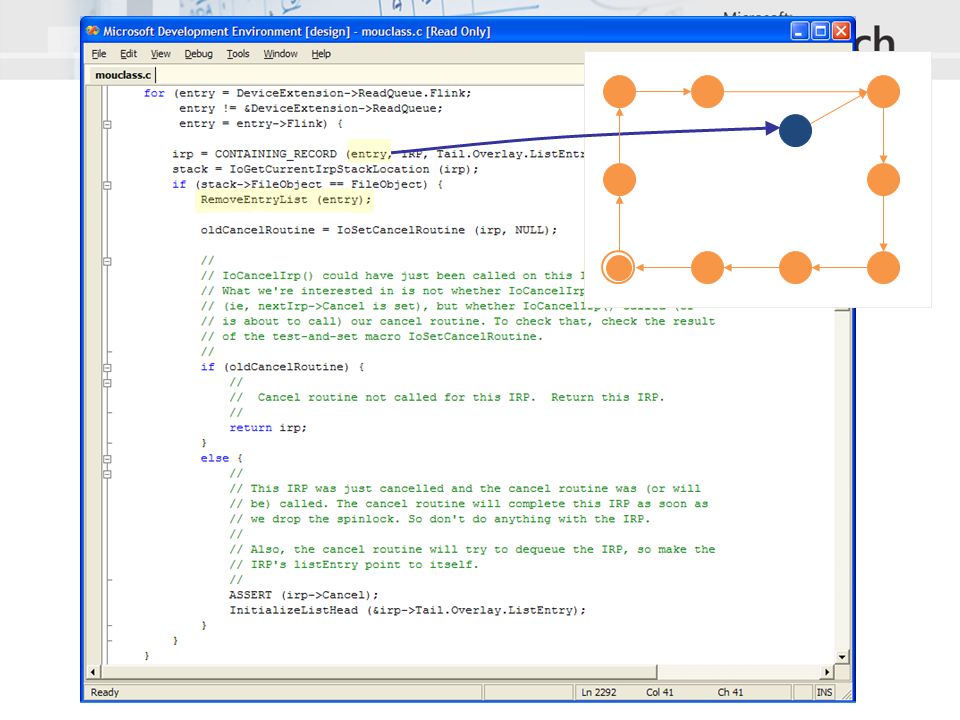
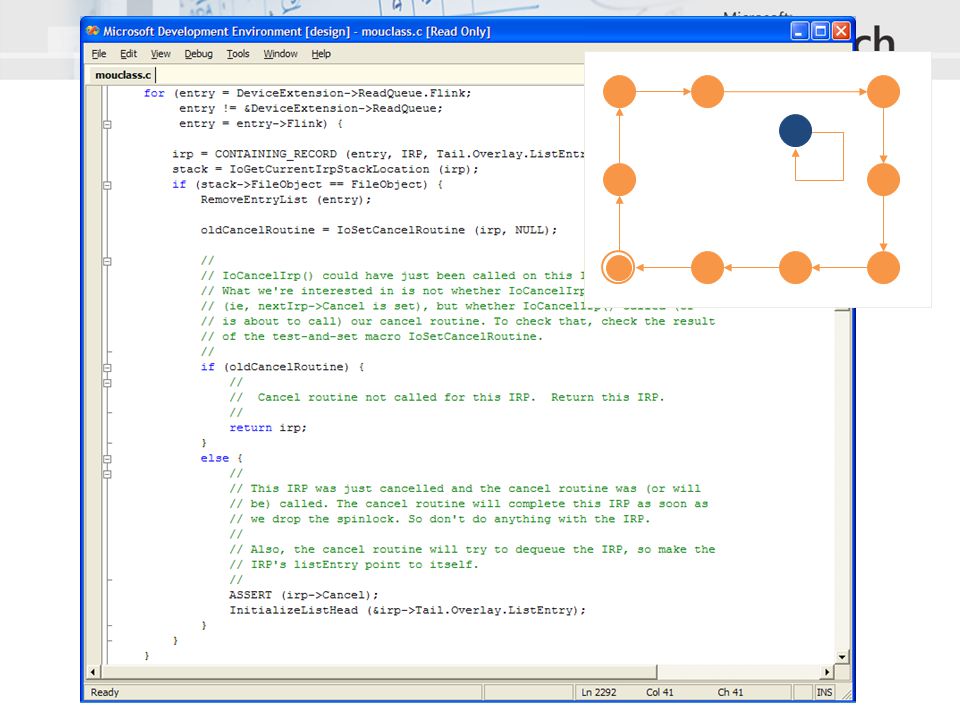
© 2009 Microsoft Corporation. All rights reserved. Memory Safety Bug BlinkFlink Irp BlinkFlink Irp BlinkFlink

8
© 2009 Microsoft Corporation. All rights reserved. Memory Safety Bug BlinkFlink Irp BlinkFlink Irp BlinkFlink

9
© 2009 Microsoft Corporation. All rights reserved. SLAyer: Abstract interpreter based on a domain of separation logic formulae together with linear arithmetic. Intention: to prove deeper properties about the heap than SLAM/SDV can handle. Experimental integration with Static Driver Verifier in progress. Joint work with the East London Massive Memory Safety Bug BlinkFlink

10
© 2009 Microsoft Corporation. All rights reserved. SLAyer: Abstract interpreter based on a domain of separation logic formulae together with linear arithmetic. Intention: to prove deeper properties about the heap than SLAM/SDV can handle. Experimental integration with Static Driver Verifier in progress. Joint work with the East London Massive Memory Safety Bug BlinkFlink

11
© 2009 Microsoft Corporation. All rights reserved. SLAyer: Abstract interpreter based on a domain of separation logic formulae together with linear arithmetic. Intention: to prove deeper properties about the heap than SLAM/SDV can handle. Experimental integration with Static Driver Verifier in progress. Joint work with the East London Massive Memory Safety Bug BlinkFlink

12
© 2009 Microsoft Corporation. All rights reserved. Separation Logic: Heap Assertions xy

13
© 2009 Microsoft Corporation. All rights reserved. (sub)heaps are possible worlds (a form of modal logic) Classical Logic + – emp : “the heap is empty” – x y : “the heap has exactly one cell x, containing y” – A ¤ B : “the heap can be divided so A holds of one part and B of the other” Add inductive definitions …and other exotic things (“magic wand”) Standard model: RAM model and many variations Separation Logic: Heap Assertions
heaps are possible worlds (a form of modal logic) Classical Logic + – emp : the heap is empty – x y : the heap has exactly one cell x, containing y – A ¤ B : the heap can be divided so A holds of one part and B of the other Add inductive definitions …and other exotic things ( magic wand ) Standard model: RAM model and many variations Separation Logic: Heap Assertions.")
14
© 2009 Microsoft Corporation. All rights reserved. A 0 A ¤ A (13 66) 0 (13 66) ¤ (13 66) –Crucial for catching “no access after deallocation” A ¤ B 0 A (13 66) ¤ (42 7) 0 (13 66) –Crucial for catching leaks (13 66) ¤ (13 66) ` false –Crucial for catching interference A Substructural Logic
 0 (13 66) ¤ (13 66) –Crucial for catching no access after deallocation A ¤ B 0 A (13 66) ¤ (42 7) 0 (13 66) –Crucial for catching leaks (13 66) ¤ (13 66) ` false –Crucial for catching interference A Substructural Logic.")
15
© 2009 Microsoft Corporation. All rights reserved. Symbolic Execution of commands [(x f:-) ¤ P] [x.f] := 42 [(x f:42) ¤ P] [true] [x.f] := 42 [??] [(x -) ¤ P] free(x) [P] [true] free(x) [??] [P] x := alloc() [9 x’. P[x’/x] ¤ (x -)] In-place Reasoning
 ¤ P] [x.f] := 42 [(x f:42) ¤ P] [true] [x.f] := 42 [ ] [(x -) ¤ P] free(x) [P] [true] free(x) [ ] [P] x := alloc() [9 x’. P[x’/x] ¤ (x -)] In-place Reasoning.")
16
© 2009 Microsoft Corporation. All rights reserved. x := null; while(?) { y := alloc(); [y.n] := x; x := y; } Loops? emp emp Æ x=null (y -) Æ x=null (y {n:x}) Æ x=null 9 x’. (x {n:x’}) Æ x’=null Invariant: (emp Æ x=null) Ç ( 9 x’. (x {n:x’}) Æ x’=null)
 { y := alloc(); [y.n] := x; x := y; } Loops. emp emp Æ x=null (y -) Æ x=null (y {n:x}) Æ x=null 9 x’. (x {n:x’}) Æ x’=null Invariant: (emp Æ x=null) Ç ( 9 x’. (x {n:x’}) Æ x’=null).")
17
© 2009 Microsoft Corporation. All rights reserved. x := null; while(?) { y := alloc(); [y.n] := x; x := y; } Loops? emp 9 x’. (x {n:x’}) Æ x’=null 9 x’. (y -) ¤ (x {n:x’}) Æ x’=null 9 x’. (y {n:x}) ¤ (x {n:x’}) Æ x’=null 9 x’,x’’. (x {n:x’’}) ¤ (x’’ {n:x’}) Æ x’=null Invariant: (emp Æ x=null) Ç ( 9 x’. (x {n:x’}) Æ x’=null) Ç ( 9 x’,x’’. (x {n:x’’}) ¤ (x’’ {n:x’}) Æ x’=null) Ç ( 9 x’,x’’,x’’’. (x {n:x’’’}) ¤ (x’’’ {n:x’’}) ¤ (x’’ {n:x’}) Æ x’=null) …
 { y := alloc(); [y.n] := x; x := y; } Loops. emp 9 x’. (x {n:x’}) Æ x’=null 9 x’. (y -) ¤ (x {n:x’}) Æ x’=null 9 x’. (y {n:x}) ¤ (x {n:x’}) Æ x’=null 9 x’,x’’. (x {n:x’’}) ¤ (x’’ {n:x’}) Æ x’=null Invariant: (emp Æ x=null) Ç ( 9 x’. (x {n:x’}) Æ x’=null) Ç ( 9 x’,x’’. (x {n:x’’}) ¤ (x’’ {n:x’}) Æ x’=null) Ç ( 9 x’,x’’,x’’’. (x {n:x’’’}) ¤ (x’’’ {n:x’’}) ¤ (x’’ {n:x’}) Æ x’=null) ….")
18
© 2009 Microsoft Corporation. All rights reserved. ls n (E, F), (E=F Æ emp) Ç ( 9 y’. (E {n:y’}) ¤ ls n (y’, F)) – list n (E) is shorthand for ls n (E, null) ls(x,y) ¤ ls(y,x) Linked List Segments x y
, (E=F Æ emp) Ç ( 9 y’. (E {n:y’}) ¤ ls n (y’, F)) – list n (E) is shorthand for ls n (E, null) ls(x,y) ¤ ls(y,x) Linked List Segments x y.")
19
© 2009 Microsoft Corporation. All rights reserved. ls n (E, F), (E=F Æ emp) Ç ( 9 y’. (E {n:y’}) ¤ ls n (y’, F)) – list n (E) is shorthand for ls n (E, null) ls n (x,t) ¤ (t {n:y}) ¤ list n (y) Linked List Segments xty Entailment: ` list n (x)
, (E=F Æ emp) Ç ( 9 y’. (E {n:y’}) ¤ ls n (y’, F)) – list n (E) is shorthand for ls n (E, null) ls n (x,t) ¤ (t {n:y}) ¤ list n (y) Linked List Segments xty Entailment: ` list n (x).")
20
© 2009 Microsoft Corporation. All rights reserved. ls n (E, F), (E=F Æ emp) Ç ( 9 y’. (E {n:y’}) ¤ ls n (y’, F)) – list n (E) is shorthand for ls n (E, null) ls n (x,t) ¤ (t {n:null}) ¤ list n (y) Linked List Segments xty Non-Entailment: 0 list n (x)
, (E=F Æ emp) Ç ( 9 y’. (E {n:y’}) ¤ ls n (y’, F)) – list n (E) is shorthand for ls n (E, null) ls n (x,t) ¤ (t {n:null}) ¤ list n (y) Linked List Segments xty Non-Entailment: 0 list n (x).")
21
© 2009 Microsoft Corporation. All rights reserved. x := null; while(?) { y := alloc(); [y.n] := x; x := y; } Loops? emp 9 x’. (x {n:x’}) Æ x’=null 9 x’. (y -) ¤ (x {n:x’}) Æ x’=null 9 x’. (y {n:x}) ¤ (x {n:x’}) Æ x’=null 9 x’,x’’. (x {n:x’’}) ¤ (x’’ {n:x’}) Æ x’=null ls n ( x,null) Invariant: (emp Æ x=null) Ç ( 9 x’. (x {n:x’}) Æ x’=null) Ç ls n ( x,null) Generalize
 { y := alloc(); [y.n] := x; x := y; } Loops. emp 9 x’. (x {n:x’}) Æ x’=null 9 x’. (y -) ¤ (x {n:x’}) Æ x’=null 9 x’. (y {n:x}) ¤ (x {n:x’}) Æ x’=null 9 x’,x’’. (x {n:x’’}) ¤ (x’’ {n:x’}) Æ x’=null ls n ( x,null) Invariant: (emp Æ x=null) Ç ( 9 x’. (x {n:x’}) Æ x’=null) Ç ls n ( x,null) Generalize.")
22
© 2009 Microsoft Corporation. All rights reserved. x := null; while(?) { y := alloc(); [y.n] := x; x := y; } a` ls n ( x,null) emp ls n ( x,null) (y -) ¤ ls n ( x,null) (y {n:x}) ¤ ls n ( x,null) 9 x’. (x {n:x’}) ¤ ls n ( x’,null) ` ls n ( x,null) Invariant: (emp Æ x=null) Ç ( 9 x’. (x {n:x’}) Æ x’=null) Ç ls n ( x,null) Loops?
 { y := alloc(); [y.n] := x; x := y; } a` ls n ( x,null) emp ls n ( x,null) (y -) ¤ ls n ( x,null) (y {n:x}) ¤ ls n ( x,null) 9 x’. (x {n:x’}) ¤ ls n ( x’,null) ` ls n ( x,null) Invariant: (emp Æ x=null) Ç ( 9 x’. (x {n:x’}) Æ x’=null) Ç ls n ( x,null) Loops .")
23
© 2009 Microsoft Corporation. All rights reserved. Hierarchical Data Structures example

24
© 2009 Microsoft Corporation. All rights reserved. hls( ¤, E, F), (E=F Æ emp) Ç ( 9 y’. ¤ (E,y’) ¤ hls( ¤, y’, F)) For: ¤ ls(x,y) = 9 z’. (x {F:y, D:z’}) ¤ ls n (z’, null) hls( ¤ ls, x, y) Second-Order Linked List Segments y x F FF DD n n n n n n D
, (E=F Æ emp) Ç ( 9 y’. ¤ (E,y’) ¤ hls( ¤, y’, F)) For: ¤ ls(x,y) = 9 z’. (x {F:y, D:z’}) ¤ ls n (z’, null) hls( ¤ ls, x, y) Second-Order Linked List Segments y x F FF DD n n n n n n D.")
25
© 2009 Microsoft Corporation. All rights reserved. hls( ¤, E, F), (E=F Æ emp) Ç ( 9 y’. ¤ (E,y’) ¤ hls( ¤, y’, F)) For: ¤ emp(x,y) = 9 z’. (x {F:y, D:z’}) hls( ¤ emp, x, y) Second-Order Linked List Segments y x F FF DDD
, (E=F Æ emp) Ç ( 9 y’. ¤ (E,y’) ¤ hls( ¤, y’, F)) For: ¤ emp(x,y) = 9 z’. (x {F:y, D:z’}) hls( ¤ emp, x, y) Second-Order Linked List Segments y x F FF DDD.")
26
© 2009 Microsoft Corporation. All rights reserved. trim(x,y) { [hls( ¤ ls, x, y)] if (x!=y) { [ 9 w’,z’. (x {F:w’, D:z’}) ¤ ls n (z’, null) ¤ hls( ¤ ls, w’, y)] free_list(x->D); [ 9 w’,z’. (x {F:w’, D:z’}) ¤ emp ¤ hls( ¤ ls, w’, y)] [ 9 w’,z’. (x {F:w’, D:z’}) ¤ hls( ¤ ls, w’, y)] trim(x->F,y); [ 9 w’,z’. (x {F:w’, D:z’}) ¤ hls( ¤ emp, w’, y)] } [hls( ¤ emp, x, y)] } Supposing: [ls n (x, null)] free_list(x); [emp] Symbolic Execution with HO lists
 { [hls( ¤ ls, x, y)] if (x!=y) { [ 9 w’,z’. (x {F:w’, D:z’}) ¤ ls n (z’, null) ¤ hls( ¤ ls, w’, y)] free_list(x->D); [ 9 w’,z’. (x {F:w’, D:z’}) ¤ emp ¤ hls( ¤ ls, w’, y)] [ 9 w’,z’. (x {F:w’, D:z’}) ¤ hls( ¤ ls, w’, y)] trim(x->F,y); [ 9 w’,z’. (x {F:w’, D:z’}) ¤ hls( ¤ emp, w’, y)] } [hls( ¤ emp, x, y)] } Supposing: [ls n (x, null)] free_list(x); [emp] Symbolic Execution with HO lists.")
27
© 2009 Microsoft Corporation. All rights reserved. Adaptive shape analysis –build in induction principles, rather than particular data structures –automatic recognition of many complex variations on linked lists: singly-linked list segments …of non-empty doubly-linked lists …with back-pointers to the head node …of cyclic doubly-linked lists … Hierarchical Data Structures

28
© 2009 Microsoft Corporation. All rights reserved. Recap Proof search by abstract interpretation Symbolically execute commands using in-place reasoning Check if invariant found using theorem prover Generalization of invariant approximations –E.g. 9y’. (x {F:y’, D:42}) ¤ ls(y’,z) ` ls(x,z) –Rules are specializations of prover’s
 ¤ ls(y’,z) ` ls(x,z) –Rules are specializations of prover’s.")
29
© 2009 Microsoft Corporation. All rights reserved. List* curr = null; int i = 0; while(i < n) { t = new(List); t->next = curr; curr = t; i++; } int j = 0; while(j < n) { curr = curr->next; j++; } Transition Systems 0: 1: 2: 3: 0 1 2 curr = null i = 0 [i < n] t = new t→next = curr curr = t i = i + 1 [i ≥ n] j = 0 [ j < n ] curr = curr→next j = j + 1 3 [ j ≥ n ]
 { t = new(List); t->next = curr; curr = t; i++; } int j = 0; while(j < n) { curr = curr->next; j++; } Transition Systems 0: 1: 2: 3: curr = null i = 0 [i < n] t = new t→next = curr curr = t i = i + 1 [i ≥ n] j = 0 [ j < n ] curr = curr→next j = j [ j ≥ n ].")
30
© 2009 Microsoft Corporation. All rights reserved. Example 0 1 2 curr = null i = 0 [i < n] t = new t→next = curr curr = t i = i + 1 [i ≥ n] j = 0 [ j < n ] curr = curr→next j = j + 1 3 [ j ≥ n ] [emp] curr = null i = 0 [emp ∧ curr = null ] [emp ∧ curr = null ∧ i = 0 ] 0 [emp] 1 [emp ∧ curr = null ∧ i = 0] curr = null i = 0

31
© 2009 Microsoft Corporation. All rights reserved. Example 0 1 2 curr = null i = 0 [i < n] t = new t→next = curr curr = t i = i + 1 [i ≥ n] j = 0 [ j < n ] curr = curr→next j = j + 1 3 [ j ≥ n ] [emp] 0 [emp ∧ curr = null ∧ i = 0 ] curr = null i = 0 [i < n] t = new t→next = curr curr = t i = i + 1 1 [i ≥ n] j = 0

32
© 2009 Microsoft Corporation. All rights reserved. Example 0 1 2 curr = null i = 0 [i < n] t = new t→next = curr curr = t i = i + 1 [i ≥ n] j = 0 [ j < n ] curr = curr→next j = j + 1 3 [ j ≥ n ] [emp] 0 [emp ∧ curr = null ∧ i = 0 ] curr = null i = 0 [i < n] t = new t→next = curr curr = t i = i + 1 1 [i ≥ n] j = 0 1 [t ↦ next : curr’ ∧ curr’ = null ∧ i’ = 0 ∧ i’ < n ∧ curr = t ∧ i = i’ + 1] emp ∧ curr = null ∧ i = 0 ∧ i < n t ↦ – ∧ curr = null ∧ i = 0 ∧ i < n t ↦ next : curr ∧ curr = null ∧ i = 0 ∧ i < n t ↦ next : curr’ ∧ curr’ = null ∧ i = 0 ∧ i < n ∧ curr = t t ↦ next : curr’∧ curr’ = null ∧ i’ = 0 ∧ i’ < n ∧ curr = t ∧ i = i’ + 1 [i < n] t = new t→next = curr curr = t i = i + 1

33
© 2009 Microsoft Corporation. All rights reserved. [i < n] t = new t→next = curr curr = t i = i + 1 [i < n] t = new t→next = curr curr = t i = i + 1 Example 0 [emp] [emp ∧ curr = null ∧ i = 0 ] curr = null i = 0 1 1 [t ↦ next : curr’ ∧ curr’ = null ∧ i’ = 0 ∧ i’ < n ∧ curr = t ∧ i = i’ + 1 ] [i ≥ n] j = 0 [i ≥ n] j = 0 1 [t ↦ next : t’ * t’ ↦ next : curr’ ∧ curr’ = null ∧ i’ = 0 ∧ i’ < n ∧ curr’’ = t’ ∧ i’’ = i’ + 1 ∧ i’’ < n ∧ curr = t ∧ i = i’’ + 1]

34
© 2009 Microsoft Corporation. All rights reserved. [i < n] t = new t→next = curr curr = t i = i + 1 [i < n] t = new t→next = curr curr = t i = i + 1 Example 0 [emp] [emp ∧ curr = null ∧ i = 0 ] curr = null i = 0 1 1 [t ↦ next : curr’ ∧ curr’ = null ∧ i’ = 0 ∧ i’ < n ∧ curr = t ∧ i = i’ + 1 ] [i ≥ n] j = 0 [i ≥ n] j = 0 1 [ t ↦ next : t’ * t’ ↦ {next : curr’} ∧ curr’ = null ∧ i’ = 0 ∧ i’ < n ∧ curr’’ = t’ ∧ i’’ = i’ + 1 ∧ i’’ < n ∧ curr = t ∧ i = i’’ + 1] Generalization

35
© 2009 Microsoft Corporation. All rights reserved. ls K (E, F), (K=0 Æ E=F Æ emp) Ç (K>0 Æ 9 y’. (E {next:y’}) ¤ ls K-1 (y’, F)) – ls n (E, F) is shorthand for 9 k. ls n k (E, F) – ls K (E, F) represents a list segment from E to F (via next) of length K Generalization [ t ↦ next : t’ * t’ ↦ {next : curr’} ∧ curr’ = null ∧ i’ = 0 ∧ i’ < n ∧ curr’’ = t’ ∧ i’’ = i’ + 1 ∧ i’’ < n ∧ curr = t ∧ i = i’’ + 1 ] { ls 2 (curr,null) ∧ i = 2 } { ls 3 (curr,null) ∧ i = 3 } { ls 4 (curr,null) ∧ i = 4 } ⋮ { ∃k,v. ls k (curr,null) ∧ i = v } { ∃k. ls k (curr,null)}
, (K=0 Æ E=F Æ emp) Ç (K>0 Æ 9 y’. (E {next:y’}) ¤ ls K-1 (y’, F)) – ls n (E, F) is shorthand for 9 k. ls n k (E, F) – ls K (E, F) represents a list segment from E to F (via next) of length K Generalization [ t ↦ next : t’ * t’ ↦ {next : curr’} ∧ curr’ = null ∧ i’ = 0 ∧ i’ < n ∧ curr’’ = t’ ∧ i’’ = i’ + 1 ∧ i’’ < n ∧ curr = t ∧ i = i’’ + 1 ] { ls 2 (curr,null) ∧ i = 2 } { ls 3 (curr,null) ∧ i = 3 } { ls 4 (curr,null) ∧ i = 4 } ⋮ { ∃k,v. ls k (curr,null) ∧ i = v } { ∃k. ls k (curr,null)}.")
36
© 2009 Microsoft Corporation. All rights reserved. Symbolic Execution [i < n] t = new t→next = curr curr = t i = i + 1 [i < n] t = new t→next = curr curr = t i = i + 1 0 [emp] curr = null i = 0 1 1 [ t ↦ next : null] [i ≥ n] j = 0 [i ≥ n] j = 0 [ ∃k. ls k (curr,null)] [i < n] t = new t→next = curr curr = t i = i + 1 [i ≥ n]; j = 0 2 [ ∃k. ls k (curr,null)] 2 [ j < n ] curr = curr→next j = j + 1 3 [ j ≥ n ] [ j < n ] 2’ [∃k. ls k (curr,null) ∧ j < n ] curr = curr →next 1
] [i < n] t = new t→next = curr curr = t i = i + 1 [i ≥ n]; j = 0 2 [ ∃k. ls k (curr,null)] 2 [ j < n ] curr = curr→next j = j [ j ≥ n ] [ j < n ] 2’ [∃k. ls k (curr,null) ∧ j < n ] curr = curr →next 1.")
37
© 2009 Microsoft Corporation. All rights reserved. Shape-Arithmetic Correlations Why is this okay? Relationship between i and the length of the list ∃k. ls k (curr,null) i = k present in the code appears due to generalization List* curr = null; int i = 0; while(i < n) { t = new(List); t->next = curr; curr = t; i++; } int j = 0; while(j < n) { curr = curr->next; j++; }
 i = k present in the code appears due to generalization List* curr = null; int i = 0; while(i < n) { t = new(List); t->next = curr; curr = t; i++; } int j = 0; while(j < n) { curr = curr->next; j++; }.")
38
© 2009 Microsoft Corporation. All rights reserved. Need to know about correlations between shape and arithmetic That is, refine shape information with arithmetic information Need to understand arithmetic Could use: –Abstract Interpretation –Interpolants –Proofs –Counter Automata –Probably others Arithmetic Engine

39
© 2009 Microsoft Corporation. All rights reserved. Modularity A framework that can utilize any such refinement method Must preserve as much of the control flow as possible Generate programs corresponding to abstract traces (sets of concrete traces) Reason for safety of generated program must transfer to our abstraction
 Reason for safety of generated program must transfer to our abstraction.")
40
© 2009 Microsoft Corporation. All rights reserved. Abstract States ∃k. ls k (curr, null) ∃v, w. x ↦ v * y ↦ w must make these appear in the generated program Variables in CEx program: original program vars existential vars Commands in CEx program: updates to program vars changes to witnesses of existential vars
 ∃v, w. x ↦ v * y ↦ w must make these appear in the generated program Variables in CEx program: original program vars existential vars Commands in CEx program: updates to program vars changes to witnesses of existential vars.")
41
© 2009 Microsoft Corporation. All rights reserved. Generating Code ∃y. Q(y) ∃x. P(x) c
 ∃x. P(x) c")
42
© 2009 Microsoft Corporation. All rights reserved. Generating Code ∃x. P(x) ∃y. Q(y) c P(a)
 ∃y. Q(y) c P(a)")
43
© 2009 Microsoft Corporation. All rights reserved. Generating Code ∃x. P(x) ∃y. Q(y) c P(a) P’(a) ⊦
 ∃y. Q(y) c P(a) P’(a) ⊦")
44
© 2009 Microsoft Corporation. All rights reserved. Generating Code ∃x. P(x) ∃y. Q(y) c P(a) P’(a) ⊦ a := x y := f(a) ∃- Elim ∃- Intro
 ∃y. Q(y) c P(a) P’(a) ⊦ a := x y := f(a) ∃- Elim ∃- Intro.")
45
© 2009 Microsoft Corporation. All rights reserved. Example [∃k. ls k (curr,null)] [i < n] t = new t→next = curr curr = t i = i + 1 1 [∃k. ls k (curr,null)] a := k [ls a (curr,null)] [i < n] t = new t→next = curr curr = t i = i + 1 [curr ↦ next : c’ * ls a (c’,null) ∧ i = i’ + 1 ∧ i’ < n ∧ curr = t ] generalize [ls a+1 (curr,null)] k := a+1 [∃ k. ls k (curr,null)]
] [i < n] t = new t→next = curr curr = t i = i [∃k. ls k (curr,null)] a := k [ls a (curr,null)] [i < n] t = new t→next = curr curr = t i = i + 1 [curr ↦ next : c’ * ls a (c’,null) ∧ i = i’ + 1 ∧ i’ < n ∧ curr = t ] generalize [ls a+1 (curr,null)] k := a+1 [∃ k. ls k (curr,null)].")
46
© 2009 Microsoft Corporation. All rights reserved. Encoding the Error 2’ [∃k. ls k (curr,null) ∧ j < n ] curr = curr →next Crash Condition of A[E ] ≝ the condition under which the command A[E] results in abort. in this case: (k = 0) if(k=0) goto ERROR; Add to program:
 ∧ j < n ] curr = curr →next Crash Condition of A[E ] ≝ the condition under which the command A[E] results in abort. in this case: (k = 0) if(k=0) goto ERROR; Add to program:.")
47
© 2009 Microsoft Corporation. All rights reserved. Full Program (≡ an unrolling of:) List* curr = null; int i = 0; while(i < n) { t = new(List); t->next = curr; curr = t; i++; } int j = 0; while(j < n) { curr = curr->next; j++; } int k; int curr = 0; int i = 0; while(i < n) { t = ?; curr = t; i++; k++; } int j = 0; while(j < n) { curr = ?; j++; if(k = 0) goto ERROR; else k--; }
 List* curr = null; int i = 0; while(i < n) { t = new(List); t->next = curr; curr = t; i++; } int j = 0; while(j < n) { curr = curr->next; j++; } int k; int curr = 0; int i = 0; while(i < n) { t = ; curr = t; i++; k++; } int j = 0; while(j < n) { curr = ; j++; if(k = 0) goto ERROR; else k--; }.")
48
© 2009 Microsoft Corporation. All rights reserved. List* curr = null; int* i = new(0); while(*i < n) { t = new(List); t->next = curr; curr = t; *i = *i + 1; } int j = 0; while(j < n) { curr = curr->next; j++; } Also Works For [∃k,v. ls k (curr,null) ∧ i ↦ v] a := k; b := v [ls a+1 (curr,null) ∧ i ↦ b + 1] k := a+1; v := b+1 loop body
; while(*i < n) { t = new(List); t->next = curr; curr = t; *i = *i + 1; } int j = 0; while(j < n) { curr = curr->next; j++; } Also Works For [∃k,v. ls k (curr,null) ∧ i ↦ v] a := k; b := v [ls a+1 (curr,null) ∧ i ↦ b + 1] k := a+1; v := b+1 loop body.")
49
© 2009 Microsoft Corporation. All rights reserved. 1.Perform shape analysis –Construct abstract transition system Separation Logic assertions at vertices Heap-manipulating commands on edges 2.Construct arithmetic abstraction 1.Add commands tracking values of existential variables “auxiliary variable introduction” 2.Throw away heap-manipulation commands 3.If ERROR unreachable in arithmetic abstraction –According to any arithmetic prover 4.Then have a memory safety proof for original program Combined Verification

50
© 2009 Microsoft Corporation. All rights reserved. End up needing to know rather a lot about the data structures Is proving only memory safety underkill? What else can we use this info for? Beyond Memory Safety

51
© 2009 Microsoft Corporation. All rights reserved.

63
List* find(List* head, int fo) { List* prev, entry, tmp; prev = head; entry = head->next; while(entry != head) { if (entry->data == fo) { tmp = entry->next; prev->next = tmp; if (?) return entry; entry->next = entry; entry = entry->next; } else { prev = entry; entry = entry->next; } return NULL; } Non-Terminating Arithmetic Abstraction List* find(List* head, int fo) { int k; List* prev, entry, tmp; prev = head; entry = ?; while(entry != head) { assume(k>0); if (?) { tmp = ?; if (?) return entry; entry = ?; } else { prev = entry; entry = ?; k--; } return NULL; }
 { List* prev, entry, tmp; prev = head; entry = head->next; while(entry != head) { if (entry->data == fo) { tmp = entry->next; prev->next = tmp; if ( ) return entry; entry->next = entry; entry = entry->next; } else { prev = entry; entry = entry->next; } return NULL; } Non-Terminating Arithmetic Abstraction List* find(List* head, int fo) { int k; List* prev, entry, tmp; prev = head; entry = ; while(entry != head) { assume(k>0); if ( ) { tmp = ; if ( ) return entry; entry = ; } else { prev = entry; entry = ; k--; } return NULL; }")
64
© 2009 Microsoft Corporation. All rights reserved. Arithmetic abstraction is sound also for termination: –If original program admits an infinite trace –Then so does the arithmetic abstraction (of its memory safety proof) –Despite the arithmetic abstraction being an over-approximation So to prove termination of heap-manipulating code: 1.Prove memory safety 2.Translate proof & program to heap-free program that Terminates only if original does Reveals potential progress measures for data structures 3.Run an arithmetic termination prover Variance analysis Termination Proving
 –Despite the arithmetic abstraction being an over-approximation So to prove termination of heap-manipulating code: 1.Prove memory safety 2.Translate proof & program to heap-free program that Terminates only if original does Reveals potential progress measures for data structures 3.Run an arithmetic termination prover Variance analysis Termination Proving.")
65
© 2009 Microsoft Corporation. All rights reserved. Concurrency PLIST_ENTRY head; KSPIN_LOCK lock; void initialize() { head = ExAllocatePool(PagedPool, sizeof(LIST_ENTRY)); InitializeListHead(&head); } void producer() { KIRQL Irql; PLIST_ENTRY entry; while (nondet()) { KeAcquireSpinlock(&lock, &Irql); entry = ExAllocatePool(PagedPool, sizeof(LIST_ENTRY)); if (entry) { InsertHeadList(&head, entry); } KeReleaseSpinlock(&lock, Irql); } void consumer() { KIRQL Irql; PLIST_ENTRY entry; while (nondet()) { KeAcquireSpinlock(&lock, &Irql); entry = RemoveHeadList(&head); if (entry != head) { ExFreePool(entry); } KeReleaseSpinlock(&lock, Irql); } lock protects a (doubly-linked cyclic) list pointed to by head
 { head = ExAllocatePool(PagedPool, sizeof(LIST_ENTRY)); InitializeListHead(&head); } void producer() { KIRQL Irql; PLIST_ENTRY entry; while (nondet()) { KeAcquireSpinlock(&lock, &Irql); entry = ExAllocatePool(PagedPool, sizeof(LIST_ENTRY)); if (entry) { InsertHeadList(&head, entry); } KeReleaseSpinlock(&lock, Irql); } void consumer() { KIRQL Irql; PLIST_ENTRY entry; while (nondet()) { KeAcquireSpinlock(&lock, &Irql); entry = RemoveHeadList(&head); if (entry != head) { ExFreePool(entry); } KeReleaseSpinlock(&lock, Irql); } lock protects a (doubly-linked cyclic) list pointed to by head.")
66
© 2009 Microsoft Corporation. All rights reserved. Infer description of data structure each lock protects Descriptions induce partitioning of heap –Changes from one program point to another –No part accessed simultaneously by multiple threads Catch accesses outside of critical sections Concurrency

67
© 2009 Microsoft Corporation. All rights reserved. Thread-modular shape analysis –supports concurrently accessed heap data –coarse-grained locking –works if there is not intricate coordination between the threads –also checks for data races –scalability: sub-exponential in number of threads Locks in the heap –unboundedly many locks –finer grained locking, e.g. hand-over-hand list locking Concurrency

68
© 2009 Microsoft Corporation. All rights reserved. Post-Context Source.c.h Verification Engine Proof Counter- Example False alarm Programming language & runtime model Potential Counter- example

69
© 2009 Microsoft Corporation. All rights reserved. Problem is undecidable: –For any program and any property, does program satisfy property? Focus on class of programs and properties –Trade-off to gain automatic inference of annotations Inherently limited

70
© 2009 Microsoft Corporation. All rights reserved. Not property driven –Already focused on a class of properties –Analyzer automatically finds & proves strongest specifications / most information it can For a property of interest, analysis results –possibly prove it –are possibly overkill –possibly do not (but may form basis of further proof) Property proved = Absence of whole class of bugs Static analysis for verification
 Property proved = Absence of whole class of bugs Static analysis for verification.")
71
© 2009 Microsoft Corporation. All rights reserved. Post-Context Source.c.h Verification Engine Proof Counter- Example False alarm Programming language & runtime model Potential Counter- example

72
© 2009 Microsoft Corporation. All rights reserved. Post-Context Source.c.h Verification Engine API spec & OS model Proof Counter- Example False alarm Programming language & runtime model Potential Counter- example

73
© 2009 Microsoft Corporation. All rights reserved. Carefully chosen fragment of a logic for describing heap data structures Theorem prover for that fragment In-place reasoning about commands Calculate invariants, generalizing using tweaked version of prover’s proof theory Abstract (candidate) memory safety proofs to arithmetic programs Use arithmetic analyses to complete safety proofs Use arithmetic termination provers Summary
 memory safety proofs to arithmetic programs Use arithmetic analyses to complete safety proofs Use arithmetic termination provers Summary.")
Similar presentations

















 (Joint work with Josh Berdine, Cristiano Calcagno, Byron Cook,>")








 Challenge: Correct and Efficient Synchronization { ……………………………>")
