Download presentation
1
Time-Space Tradeoffs in Resolution: Superpolynomial Lower Bounds for Superlinear Space Chris Beck Princeton University Joint work with Paul Beame & Russell Impagliazzo

2
SAT The satisfiability problem is a central problem in computer science, in theory and in practice. Terminology: – A Clause is a boolean formula which is an OR of variables and negations of variables. – A CNF formula is an AND of clauses. Object of study for this talk: CNF-SAT: Given a CNF formula, is it satisfiable?

3
Resolution Proof System Lines are clauses, one simple proof step Proof is a sequence of clauses each of which is – an original clause or – follows from previous ones via resolution step a CNF is UNSAT iff can derive empty clause ⊥

4
Proof DAG General resolution: Arbitrary DAG Tree-like resolution: DAG is a tree

5
SAT Solvers Well-known connection between Resolution and SAT solvers based on Backtracking These algorithms are very powerful – sometimes can quickly handle CNF’s with millions of variables. On UNSAT formulas, computation history yields a Resolution proof. – Tree-like Resolution ≈ DPLL algorithm – General Resolution ≿ DPLL + “Clause Learning” Best current SAT solvers use this approach

6
SAT Solvers

7
DPLL requires very little memory Clause learning adds a new clause to the input CNF every time the search backtracks – Uses lots of memory to try to beat DPLL. – In practice, must use heuristics to guess which clauses are “important” and store only those. Hard to do well! Memory becomes a bottleneck. Question: Is this inherent? Or can the right heuristics avoid the memory bottleneck?

8
Proof Complexity & Sat Solvers Proof Size ≤ Time for Ideal SAT Solver Proof Space ≤ Memory for Ideal SAT Solver Many explicit hard UNSAT examples known with exponential lower bounds for Resolution Proof Size. Question: Is this also true for Proof Space?

9
Space in Resolution … Must be in memory

10
Lower Bounds on Space?

11
Size-Space Tradeoffs for Resolution

12
Size-Space Tradeoffs Informal Question: Can we formally show that memory rather than time can be a real bottleneck for resolution proofs and SAT solvers? Formal Question (Ben-Sasson): “Does there exist a such that any CNF with a refutation of size T also has a refutation of size T in space O()?” Our results: Families of formulas of size n having refutations in Time, Space n log n, but all resolution refutations have T > (n 0.58 log n /S) loglog n/logloglog n Not even close
: Does there exist a such that any CNF with a refutation of size T also has a refutation of size T in space O() Our results: Families of formulas of size n having refutations in Time, Space n log n, but all resolution refutations have T > (n 0.58 log n /S) loglog n/logloglog n Not even close.")
13
Tseitin Tautologies Given an undirected graph and :→ 2, define a CSP: Boolean variables: Parity constraints: (linear equations) When has odd total parity, CSP is UNSAT.
 When has odd total parity, CSP is UNSAT.")
14
Tseitin Tautologies When odd, G connected, corresponding CNF is called a Tseitin tautology. [Tseitin ‘68] Only total parity of matters Hard when G is a constant degree expander: [Urqhart 87]: Resolution size = 2 Ω() [Torán 99]: Resolution space =Ω(E) This work: Tradeoffs on × grid, ≫, and similar graphs, using isoperimetry.
 [Torán 99]: Resolution space =Ω(E) This work: Tradeoffs on × grid, ≫, and similar graphs, using isoperimetry..")
15
Graph for our result l n

16
A Refutation

17
A Different Refutation

18
Complexity Measure To measure progress as it occurs in the proof, want to define a complexity measure, which assigns a value to each clause in the proof. Wish list: – Input clauses have small value – Final clause has large value – Doesn’t grow quickly in any one resolution step

19
Complexity Measure for Tseitin Say an assignment to an (unsat) CNF is a critical if it violates only one constraint. For critical to Tseitin formula, “ ’s vertex”: For any Clause, define the “critical vertex set”: () ≔{ () : critical to, falsifies } ()≔ vertex of that constraint
 ≔{ () : critical to, falsifies } ()≔ vertex of that constraint.")
20
Critical Set Examples Blue = 0 Red = 1 function: one odd vertex in corner For the empty clause,Critical set is everything. In these examples, Graph is a Grid.

21
Critical Set Examples Blue = 0 Red = 1 For a clause that doesn’t cut the graph, Critical set is … still everything.

22
Critical Set Examples Blue = 0 Red = 1 For this clause, several components. Parity mismatch in only one, Upper left is critical.

23
Critical Set Examples Blue = 0 Red = 1

24
Complexity Measure Define () ≔ |()|. Then is a sub-additive complexity measure: (clause of ) = 1, (⊥) = #, () ≤ ( 1 ) + ( 2 ), when 1, 2 ⊦. Useful property: Every edge on the boundary of () is assigned by.
 = 1, (⊥) = #, () ≤ ( 1 ) + ( 2 ), when 1, 2 ⊦. Useful property: Every edge on the boundary of () is assigned by..")
25
Complexity vs. Time Consider the time ordering of any proof, and plot complexity of clauses in memory v. time Only constraints – start low, end high, and because of sub-additivity, cannot skip over any [t, 2t] window of μ-values on the way up. Time μ Input clauses ⊥

26
A Classic Application

28
Graph for our result What happens to our formula when we apply a random restriction? Say, each edge is set to 0,1,* with probability 1/3, independently. l n

29
Restricting a single variable l n

30
l n

31
Applying a random restriction l n

32
l n

33
l n

34
A Classic Application

35
Observation

36
Medium complexity clauses Fix 0 = 4 and say that clause has complexity level iff 2 0 ≤ () <2 +1 0 Medium complexity clause: complexity level between 0 and log -1 – By choice of parameters 4 () < ||/2 Subadditivity can’t skip any level going up.
 < Medium complexity clause: complexity level between 0 and log -1 – By choice of parameters 4 () < ||/2 Subadditivity can’t skip any level going up.")
37
Main Lemma

38
Complexity vs. Time Consider the time ordering of any proof, and divide time into equal epochs (fix later) Time Hi Med Low
 Time Hi Med Low.")
39
Two Possibilities Consider the time ordering of any proof, and divide time into equal epochs (fix later) Either, a clause of medium complexity appears in memory for at least one of the breakpoints between epochs, Time Hi Med Low
 Either, a clause of medium complexity appears in memory for at least one of the breakpoints between epochs, Time Hi Med Low")
40
Two Possibilities Time Hi Med Low

41
Analysis

43
Two Possibilities Time Hi Med Low

44
Two Possibilities Time Hi Med Low

45
Restating this as a decomposition S T Size is mS T/m

46
An even better tradeoff Don’t just divide into epochs once Recursively divide proof into epochs and sub-epochs where each sub-epoch contains sub-epochs of the next smaller size Prove that, if an epoch does a lot of work, either – Breakpoints contain many complexities – A sub-epoch does a lot of work

47
An even better tradeoff a

48
… Internal Node Size = mS Leaf Node Size = T/m^(h-1)
")
49
An even better tradeoff

50
Final Tradeoff If space is at most 2 2 / 2 then size blows up by a super-polynomial amount

51
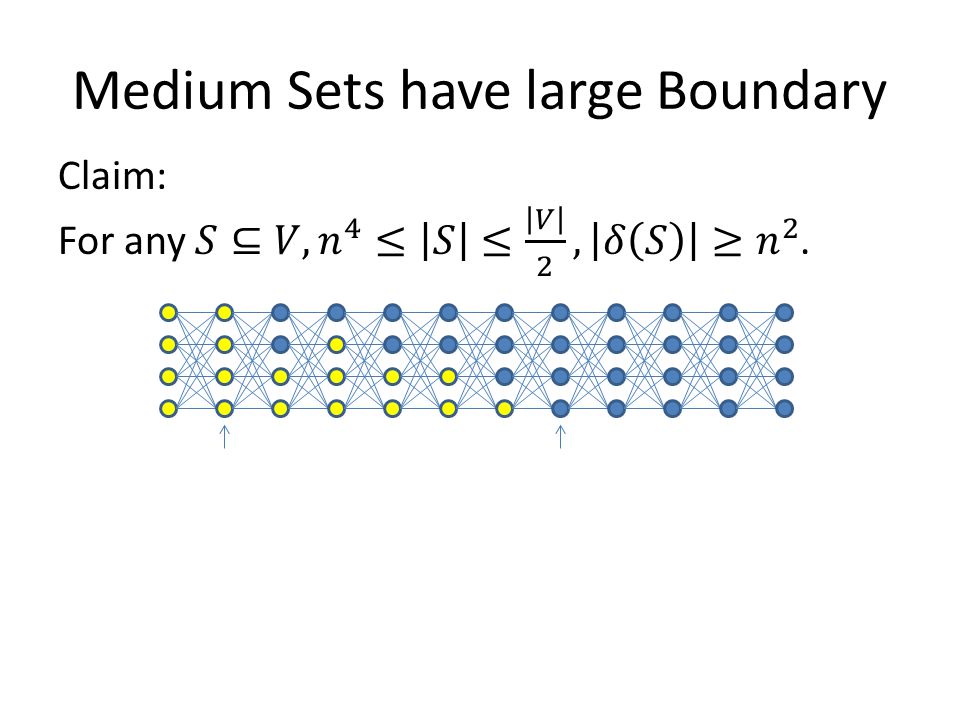
Medium Sets have large Boundary

53
Extended Isoperimetric Inequality Lemma: For 1, 2 ⊆, both medium, 2| 1 |<| 2 |, have |( 1 ) ∪ ( 2 )| ≥ 2 2. Two medium sets of very different sizes boundary guarantee doubles. Also: medium sets of super-increasing sizes boundary guarantee goes up by factor of

54
Extended Isoperimetric Inequality If the sets aren’t essentially blocks, we’re done. If they are blocks, reduce to the line:

55
Intervals on the line

56
Ext. Isoperimetry in Random Graph

57
Proof DAG

58
“Regular”: On every root to leaf path, no variable resolved more than once.

59
Tradeoffs for Regular Resolution Theorem : For any k, 4-CNF formulas (Tseitin formulas on long and skinny grid graphs) of size n with – Regular resolution refutations in size n k+1, Space n k. – But with Space only n k- , for any > 0, any regular resolution refutation requires size at least n log log n / log log log n.

60
Regular Resolution Can define partial information more precisely Complexity is monotonic wrt proof DAG edges. This part uses regularity assumption, simplifies arguments with complexity plot. Random Adversary selects random assignments based on proof – No random restrictions, conceptually clean and don’t lose constant factors here and there.

61
Open Questions More than quasi-polynomial separations? – For Tseitin formulas upper bound for small space is only a log n power of the unrestricted size – Candidate formulas? – Are these even possible? Other proof systems? Other cases for separating search paradigms: “dynamic programming” vs. “binary search”?

62
Thanks!









 Toby Walsh Cork Constraint Computation Centre University College Cork Ireland 4c.ucc.ie/~tw/sat/>")

 Literal: propositional variable or its negation p >")


 two kinds: Application of inference rules: Legitimate (sound)>")

 two kinds: Application of inference rules: Legitimate (sound) generation.>")


 what makes them hard? any solutions? Definitions >")

 A.I. Planning problems: can we reach a desired state in k steps? Verification of safety properties:>")
 two kinds: –Application of inference rules Legitimate (sound) generation of new sentences from old Proof.>")
