Download presentation
Presentation is loading. Please wait.

1
3. Slip and Rotor frequency of IM
The revolving magnetic field of the stator of 3 phase IM rotates in a given direction (clockwise/counter based on the phase sequence of supplied voltage) with synchronous speed Ns. The rotor of 3 phase induction motor starts running in the direction of rotating magnetic field. At standstill, rotor conductors are being cut by rotating flux at synchronous speed. At this instant, frequency f2 of rotor emf and current is equal to the supply frequency f1.
 with. synchronous speed Ns. The rotor of 3 phase induction motor starts running in. the direction of rotating magnetic field. At standstill, rotor conductors are being cut by rotating. flux at synchronous speed. At this instant, frequency f2. of rotor emf and current is equal to the supply. frequency f1.")
2
The difference in speeds depends upon the load on the motor .
When the rotor rotates at a speed nr in the direction of rotating field, the relative speed between synchronously rotating stator flux and rotor conductors becomes:- In practice the rotor never succeeds in catching up with the stator field. If it really did so, then, there would be no relative speed between the two; hence no rotor emf, no rotor current, and so no torque to maintain rotation. That is why, in the rotor windings emf and current are induced and the rotor develops torque . The difference in speeds depends upon the load on the motor . Where, ns - Slip speed Ns - synch.speed nr – rotor speed

3
Therefore, frequency of the rotor emf is:-
,rps Slip is defined as Thus, the frequency of the rotor emf and current in an induction motor f2 = Sf1; and f2 is called the slip frequency. We know that,

4
Rotor emf, current and power of IM
At standstill, relative speed between magnetic field of the stator and rotor conductors is synchronous speed of the field Ns and slip S = 1. Let the per phase induced emf in rotor circuit at this moment be E2. Stator field speed Rotor speed Relative slip Rotor emf Ns 1 E2 0.4Ns 0.6Ns 0.6 0.6E2 0.8Ns 0.2Ns 0.2 0.2E2 In general, for any value of slip S, the per phase generated emf in the rotor conductors is SE2

5
Rotor leakage reactance at standstill is:-
Rotor leakage reactance at any slip:- Rotor leakage impedance at standstill:- Rotor leakage impedance at any slip is:-

6
Per phase rotor current at standstill:-
Per phase rotor current at any slip:- Per phase power input to rotor is:- Where, pg – the power transferred from stator to rotor across the air gap. θ - power factor angle of the rotor which I2 lugs E2. θ - arc tan

8
Rotor equivalent circuit
X2 Z2 SX2 = X2` r2/S E2 r2

9
Pg can be expressed in an other way

11
Where, - rotor ohmic loss
- internal mechanical power developed in the rotor

12
Thus from rotor Equivalent circuit of IM, ohmic loss in the rotor circuit is equal to slip times power input to the rotor. i.e. Internal Torque (gross) developed per phase is:_ Where,
 developed per phase is:_. Where,")
13
windage) OR, Power output at the shaft can be obtained from Pg
Pshaft = PM – Pmech loss (friction & windage) Pshaft = Pg – (rotor ohmic loss + fric. & windage)
 Pshaft = Pg – (rotor ohmic loss + fric. & windage)")
14
Output or shaft torque is –
If the stator input is known, then, air gap power is –

15
Losses and efficiency of 3-phase IM
There are two major losses in 3-phase IM. 1) Fixed losses (Rotational losses) 2) Variable losses Fixed losses – are usually taken to be constant at a constant speed over the normal working range of the IM; even though friction losses may vary slightly with load and speed. Fixed losses are composed of:- a) Core losses - are a function of speed and flux - Hyteresis loss –- - Eddy current loss –
 Fixed losses (Rotational losses) 2) Variable losses. Fixed losses – are usually taken to be constant at a constant. speed over the normal working range of the IM; even though friction losses may vary slightly with. load and speed. Fixed losses are composed of:- a) Core losses - are a function of speed and flux. - Hyteresis loss –- - Eddy current loss –")
17
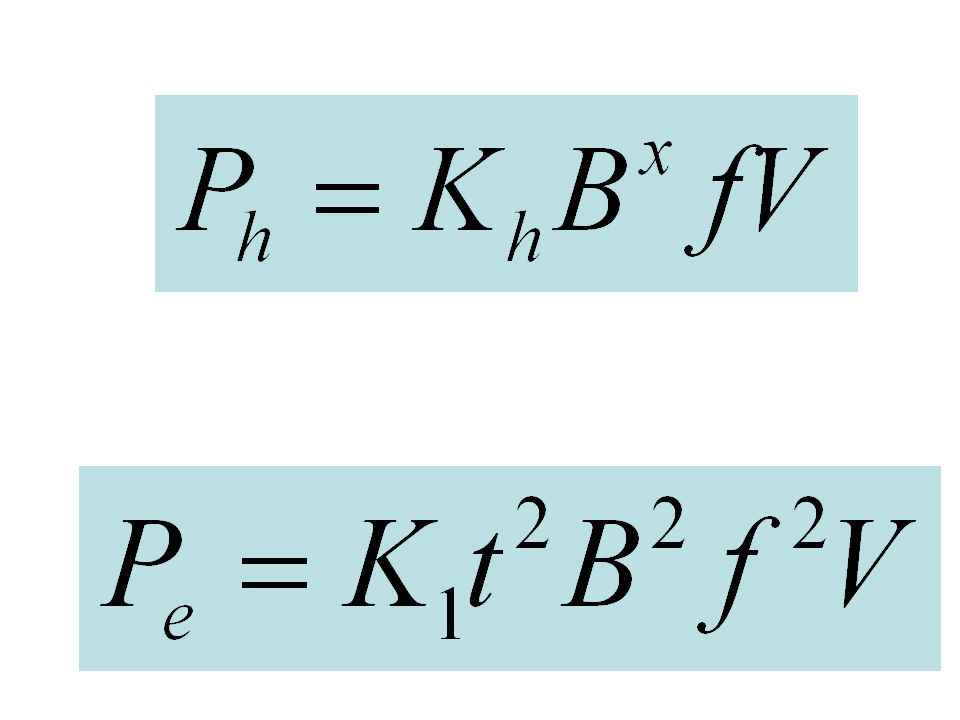
where, – is constant for a given iron used.
- flux density raised to Steinmetz exponent, and the value of x is 1.6 – – frequency of flux - volume of iron used. – eddy current constant for the conductive material used. – thickness of the conductive material used. b) Mechanical loss - Friction losses ( bearing & brush friction in WRIMs) - Windage losses.
 Mechanical loss. - Friction losses ( bearing & brush friction. in WRIMs) - Windage losses.")
18
Under usual working conditions, the rotor current of 3-phase IMs is of very low frequency. As a result, rotor core losses which are almost proportional to frequency squared are negligible. Fixed losses (rotational losses) of IMs can be obtained directly by performing no-load test on the IM. Fixed losses = (Pinput– I2R stator loss) at no-load
 of IMs can be obtained directly by performing no-load test on the IM. Fixed losses = (Pinput– I2R stator loss) at no-load.")
19
Variable losses – The value of these losses vary with load variation and are composed of:-
a) Stator ohmic losses b) Rotor ohmic losses c) Brush contact losses for WRIMs only d) Stray load losses – are losses due to step harmonics, skin effect losses in stator conductors and iron losses in structural parts of machines. The stator and rotor ohmic losses (total ohmic loss) can be obtained from block rotor test. The brush contact loss for WRIMs and stray losses are very small & can be taken as 0.5 – 1% of the total losses.
 Stator ohmic losses. b) Rotor ohmic losses. c) Brush contact losses for WRIMs only. d) Stray load losses – are losses due to step harmonics, skin effect losses in stator conductors and iron losses in structural parts of machines. The stator and rotor ohmic losses (total ohmic loss) can be obtained from block rotor test. The brush contact loss for WRIMs and stray losses are very small & can be taken as 0.5 – 1% of the total losses.")
20
Power flow diagram of IM.
Power input Pin = √3VlIlcosθ Rotor input power Shaft power Mech. power developed Pg PM Rotor core loss Rotor I2R loss Stator core loss Friction and windage loss Stator I2R loss

21
Efficiency of IM. Actually, the IM experiences a change in rotor speed with load as well as a change in the rotor frequency resulting from the speed change. i.e. neither the rotational losses (which are a functions of speed and frequency ) nor the stator and rotor electrical losses ( which are functions of load) are constant. However, the efficiency of a 3-phase induction motor is:-
 nor the stator and rotor electrical losses ( which are functions of load) are constant. However, the efficiency of a 3-phase induction motor is:-")
22
Phasor diagram of IM An IM is similar to transformers in many respects. IM at stand still Application of 3-phase balanced voltage at frequency f1to the stator winding causes the development of rotating magnetic field; which induces rotor and stator emfs. Line frequency f1 appears in E2 also, because rotor is at stand still. The emf ratio for the IM is:-

23
Where, Kw1 and Kw2 are stator and rotor winding distribution factors.
Stator and rotor windings which obviously possess resistances and reactance are treated as transformer primary and secondary windings. Thus, the phasor diagram and equivalent circuit of a three-phase IM are almost similar to those in a trans-r. The main differences are; - Appearance of winding factors Kw1 and Kw2 in the voltage ratio in IMs. - The no-load current in IM varies from 30-50% of full load current, where as in transformers it varies from 2-6% of the full load current. This is because, the resultant flux in IM completes its path through high reluctance air-gap.

24
Phasor diagram of IM at standstill.
E1 E2=I2Z2 I2 I2r2 jI2x2 ф Im Ic -I2 I1 V1= -E1 I1r1 jI1x1 Io θ1 θ2

25
Pasor diagram of IM at full load slip
V1 jI1x1 I1r1 V1= -E1 I1 θ1 θ0 I0 Ic I2r2 ф Im θ2 I2 E2 jI2x2 E1

26
Observe that, the power factor angle at stand still condition is large. i.e. the stator power factor at starting is very poor. At normal operating slip, θ1 is small. The rotor voltage equation now becomes SE2 = I2(r2 + jX2) and it is illustrated in the phasor diagram. θ1
 and it is illustrated in the phasor diagram. θ1.")
Similar presentations






>")
>")
?>")












