Download presentation
Presentation is loading. Please wait.

1
Fusion of Time-of-Flight Depth and Stereo for High Accuracy Depth Maps Reporter :鄒嘉恆 Date : 2009/11/17

2
Introduction They provide real time depth estimates by combine stereo and Time-of-flight.

3
Outline Motivation Multi-sensor calibration Geometric calibration Photometric calibration Calibration verification Sensor fusion Experimental results Conclusion

4
Motivation Problem: Laser scanner are too slow for real time use. Stereo fails on textureless scenes. TOF is low resolution, noisy, and poorly calibrated.

5
Multi-sensor setup SR3000: 176x144 Operational range up to 7 meters 2 CCD stereo cameras limit the calibration range from 1m to 1.4m

6
Multi-sensor calibration Geometric calibration

7
Multi-sensor calibration Photometric calibration

8
Multi-sensor calibration Calibration verification-plane experiment

9
Multi-sensor calibration Calibration verification-plane experiment

10
Multi-sensor calibration Calibration verification-plane experiment Calibration verification-box experiment

11
Sensor fusion f d : the local evidence for node i f s : a symmetric function measures the smoothness assumption about the scene f r : the additional local evidence based on the measurement from the TOF sensor.

12
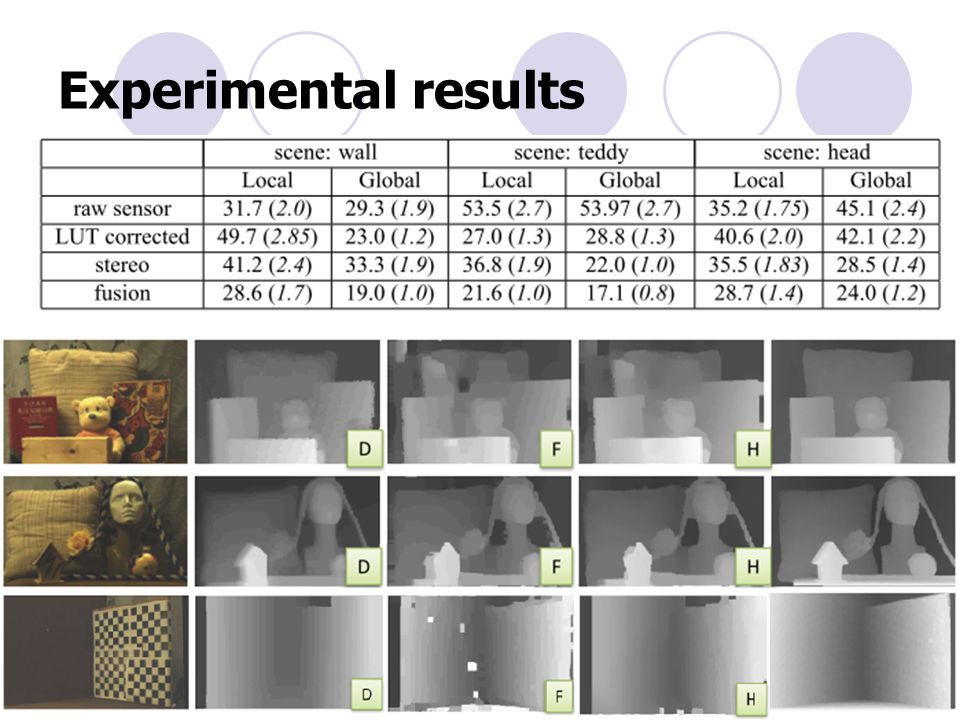
Experimental results Using TOF (A)local method (B)local method with LUT (C)global method (D)global method with LUT Using stereo (E)local method (F)global method (G)local fusion method (H)global fusion method
local method (B)local method with LUT (C)global method (D)global method with LUT Using stereo (E)local method (F)global method (G)local fusion method (H)global fusion method")
13
Experimental results

15
Conclusion They present a simple and effective calibration method to improve the performance of time-of-flight sensors. Their method can achieve an absolute accuracy of about 5mm over a range of one meter. The fusion results reduce the over-all error by 50%.

Similar presentations
>")



 Reporter :鄒嘉恆 Date : 10/06/2009.>")








 Department of Electrical and Computer Systems Engineering Monash.>")





