Download presentation
Presentation is loading. Please wait.

1
Skynet An Autonomous Quatrocopter Designed by Andrew Malone And Bryan Absher

2
Introduction Flying robot Self stabilizing Able to fly in preprogrammed patterns Autonomous Low cost

3
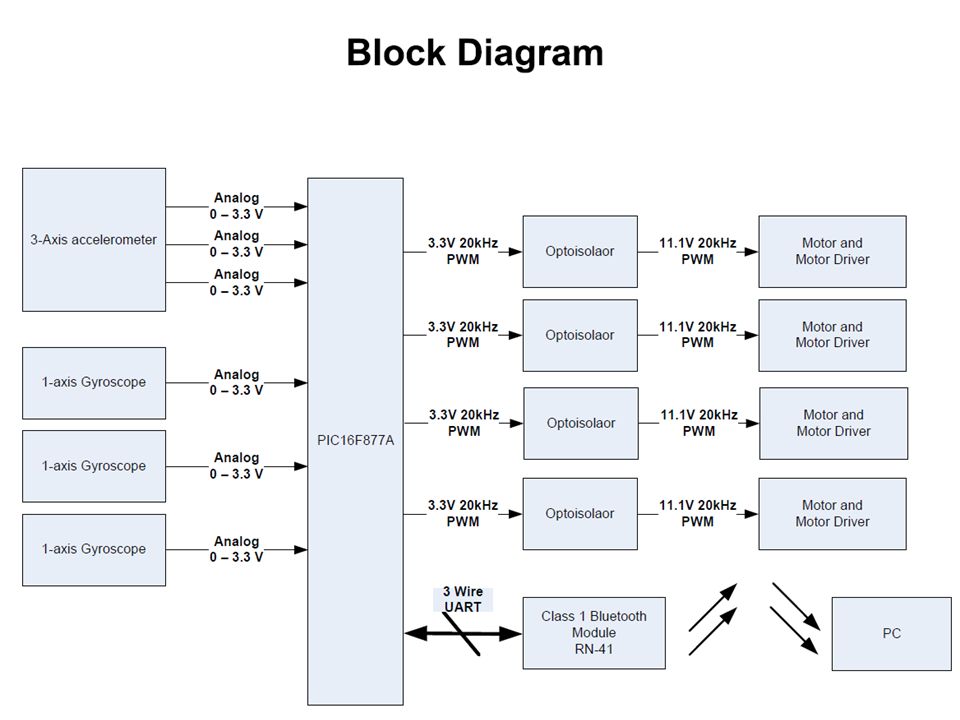
Outline Block Diagram PWM Control Motor Driver Circuit Wireless Communications Sensors Control System Results Applications Future Improvements

5
Power Consumption Logic Power –2 x PICLF877A Microprocessor 0.6mA at 3 V and 4Mhz –3 x LY530ALH 1 Axis Gryroscope 5mA at 3 V –ADXL335 3 axis Accelerometer 3 uA at 3 V Use 2 button batteries at 150mAh each

6
Motor Driving System Control of High-Current Motors with a Microprocessor Microprocessor Output –PIC16F877A –2V to 5V max ~25mA Motor –GWS EDF50 –~4 Amps at 10.8 V

7
PWM Characteristics Output Voltage is Simulated –Device is Switched On and Off PIC PWM max 25mA Magnifies Motor Driving Concerns –Inductance –Generation –Noise –Power on Ground

8
System Requirements Extremely High Current Gain –~1000A/A 10V Maximum Output from 11V Supply High Current Output –~5A per Motor Fast Switching Time –< 20µs Complete Electrical Isolation –No Common Ground

9
Optical Isolation Anode and Cathode Voltages drive infrared LED Light Modulates Phototransistor Base Voltage Complete electric isolation Cheap ($0.60 EE store) Fast (5 – 10 µs) TIL111 Perfect for PWM
 Fast (5 – 10 µs) TIL111 Perfect for PWM")
10
Darlington Transistor TIP 122 –5A Max Current –β >1000 at 5A –~1V VCE –< 20µs Switching Time

11
Delivery to Motor AC Output Interacts with Inductance Motors Prefer DC inputs Low-pass Filter http://www.zen22142.zen.co.uk/Design/dcpsu.htm

12
Final Circuit Design

13
Wireless Communication IEEE 802.15.1 (Bluetooth) –Low power (100mA Tx, 20mA Rx) –Complex Protocol Stack –Small Network Size –Fast Data Rates (1.5 Mbit/s, or 3 Mbit/s) IEEE 802.15.4 Zigbee –Low power –Low overhead –Slower data rates –Large network size
 –Low power (100mA Tx, 20mA Rx) –Complex Protocol Stack –Small Network Size –Fast Data Rates (1.5 Mbit/s, or 3 Mbit/s) IEEE Zigbee –Low power –Low overhead –Slower data rates –Large network size")
14
Our Implementation Simple configuration UART communications –115 kBaud (Limited by PIC16LF877A) –3.3 V RN-41-SM –Light weight –Low power –High data speed Good for tuning PID
 –3.3 V RN-41-SM –Light weight –Low power –High data speed Good for tuning PID")
15
Sensor Theory Accelerometer –Charged cantilever –Change in acceleration changes the capacitance of the cantilever

16
Sensor Theory Gyroscopes –MEMS gyroscopes consist of a vibrating structure –Angular velocity changes the vibration

17
Sensor Implementation Ideal implementation: –Initial angles = arctan(x/z) and arctan(y/z) –ω from gyroscope reading –Subsequent angles = initial angles + ω*dt –Accelerations relative to ground derived from accelerometer combined with gyroscope angle readings –Velocity = a*dt –Position = v*dt
 and arctan(y/z) –ω from gyroscope reading –Subsequent angles = initial angles + ω*dt –Accelerations relative to ground derived from accelerometer combined with gyroscope angle readings –Velocity = a*dt –Position = v*dt")
18
Sensor Implementation Accelerometers and Gyroscopes vary widely from specification –Accelerometer bias must be calibrated –Gyroscope bias varies over time Inaccurate over long periods Readings can be corroborated using a Kalman Filter Integrals rely on fast sampling rate

19
Sensor Implementation Angle –Assume gravity is greatest acceleration –Angle = arctan(r/z) –Extremely accurate Change in Altitude –Integrate Z-axis acceleration Accurate for very small accelerations
 –Extremely accurate Change in Altitude –Integrate Z-axis acceleration Accurate for very small accelerations")
20
System Control PID control –Proven method –Standard Tuning methods Ziegler–Nichols –Effective at controlling high order systems

21
Our Control System

22
Results PID-controlled power output Accurate angular orientation measurement Sufficient lift, battery life Wireless feedback

23
Applications Aerial Displays –MIT Flyfire Flying sensor network Autonomous surveillance

24
Improvements 32 or 16bit ARM processor at 100 Mhz Horizontal motion measurements –Local or Global GPS –SONAR Environment sensors –CO2 –Visual –Wind Speed ZigBee mesh network –Create a flying sensor network –Distributed intelligence Kalman Filter –Reduce noise in angle measurements

Similar presentations







>")






 Group 8 Andrés F. Suárez (EE) Brian Maldonado (EE) Rígel Jiménez (EE)>")
 By: Ashwaq Alkailany Reema Abubaker Supervised by: Dr. Luia Malhis.>")



