Download presentation
Presentation is loading. Please wait.

1
Constraint Satisfaction Problems Russell and Norvig: Chapter 5.1-3

2
Intro Example: 8-Queens Generate-and-test, 8 8 combinations

3
Intro Example: 8-Queens

4
What is Needed? Not just a successor function and goal test But also a means to propagate the constraints imposed by one queen on the others and an early failure test Explicit representation of constraints and constraint manipulation algorithms

5
Constraint Satisfaction Problem Set of variables {X 1, X 2, …, X n } Each variable X i has a domain D i of possible values Usually D i is discrete and finite Set of constraints {C 1, C 2, …, C p } Each constraint C k involves a subset of variables and specifies the allowable combinations of values of these variables Assign a value to every variable such that all constraints are satisfied

6
Example: 8-Queens Problem 8 variables X i, i = 1 to 8 Domain for each variable {1,2,…,8} Constraints are of the forms: X i = k X j k for all j = 1 to 8, j i X i = k i, X j = k j |i-j| | k i - k j | for all j = 1 to 8, j i

7
Example: Map Coloring 7 variables {WA,NT,SA,Q,NSW,V,T} Each variable has the same domain {red, green, blue} No two adjacent variables have the same value: WA NT, WA SA, NT SA, NT Q, SA Q, SA NSW, SA V,Q NSW, NSW V WA NT SA Q NSW V T WA NT SA Q NSW V T

8
Example: Task Scheduling T1 must be done during T3 T2 must be achieved before T1 starts T2 must overlap with T3 T4 must start after T1 is complete T1 T2 T3 T4

9
Constraint Graph Binary constraints T WA NT SA Q NSW V Two variables are adjacent or neighbors if they are connected by an edge or an arc T1 T2 T3 T4

10
CSP as a Search Problem Initial state: empty assignment Successor function: a value is assigned to any unassigned variable, which does not conflict with the currently assigned variables Goal test: the assignment is complete Path cost: irrelevant

11
Remark Finite CSP include 3SAT as a special case 3SAT is known to be NP-complete So, in the worst-case, we cannot expect to solve a finite CSP in less than exponential time

12
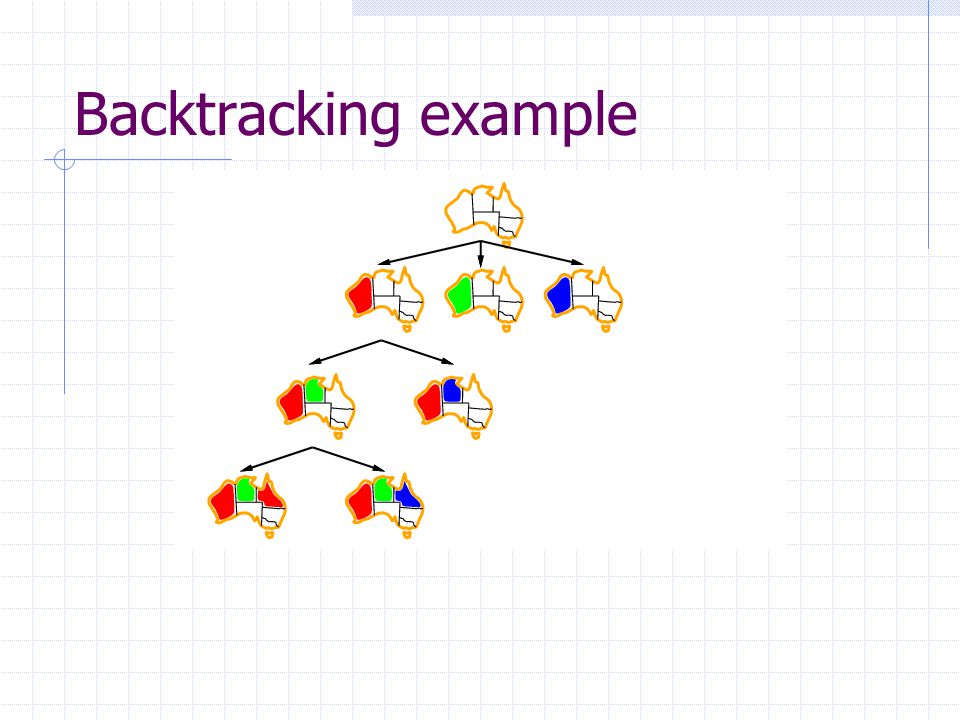
Backtracking example

16
Backtracking Algorithm CSP-BACKTRACKING(PartialAssignment a) If a is complete then return a X select an unassigned variable D select an ordering for the domain of X For each value v in D do If v is consistent with a then Add (X= v) to a result CSP-BACKTRACKING(a) If result failure then return result Remove (X= v) from a Return failure Start with CSP-BACKTRACKING({})
 If a is complete then return a X select an unassigned variable D select an ordering for the domain of X For each value v in D do If v is consistent with a then Add (X= v) to a result CSP-BACKTRACKING(a) If result failure then return result Remove (X= v) from a Return failure Start with CSP-BACKTRACKING({})")
17
Improving backtracking efficiency Which variable should be assigned next? In what order should its values be tried? Can we detect inevitable failure early?

18
Most constrained variable Most constrained variable: choose the variable with the fewest legal values a.k.a. minimum remaining values (MRV) heuristic
 heuristic.")
19
Most constraining variable Tie-breaker among most constrained variables Most constraining variable: choose the variable involved in largest # of constraints on remaining variables

20
Least constraining value Given a variable, choose the least constraining value: the one that rules out the fewest values in the remaining variables Combining these heuristics makes 1000 queens feasible

21
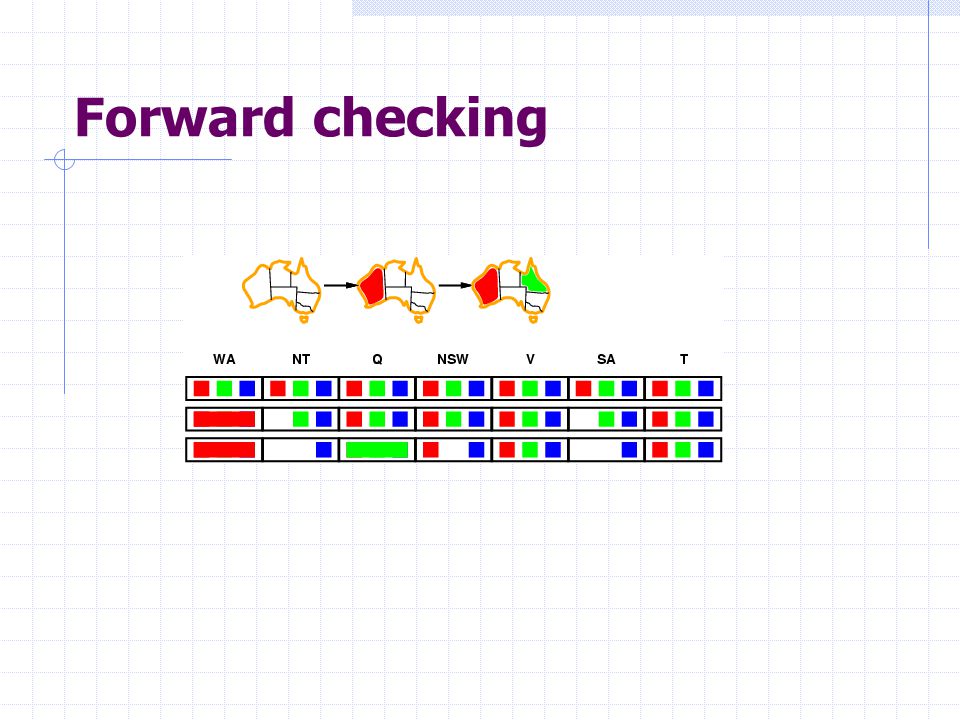
Forward Checking After a variable X is assigned a value v, look at each unassigned variable Y that is connected to X by a constraint and deletes from Y’s domain any value that is inconsistent with v

22
Forward checking

26
Constraint propagation Forward checking propagates information from assigned to unassigned variables, but doesn't provide early detection for all failures: NT and SA cannot both be blue!

27
Definition (Arc consistency) A constraint C_xy is said to be arc consistent w.r.t. x if for each value v of x there is an allowed value of y. Similarly, we define that C_xy is arc consistent w.r.t. y. A binary CSP is arc consistent iff every constraint C_xy is arc consistent wrt x as well as wrt y.

28
When a CSP is not arc consistent, we can make it arc consistent, e.g. by using AC3. This is also called “enforcing arc consistency”.

29
Example Let domains be D_x = {1,2,3}, D_y = {3,4,5,6} A constaint C_xy = {(1,3),(1,5),(3,3),(3,6)} C_xy is not arc consistent w.r.t. x, neither w.r.t. y. By enforcing arc consistency, we get reduced domains D’_x = {1,3}, D’_y={3,5,6}

30
Arc consistency Simplest form of propagation makes each arc consistent X Y is consistent iff for every value x of X there is some allowed y

31
Arc consistency Simplest form of propagation makes each arc consistent X Y is consistent iff for every value x of X there is some allowed y

32
Arc consistency If X loses a value, neighbors of X need to be rechecked

33
Arc consistency Arc consistency detects failure earlier than forward checking Can be run as a preprocessor or after each assignment

34
Example: domain reduction Consider constraints: X > Y, Y > Z Domains: Dx = Dy = Dz = {1,2,3} - 1 in Dx is removed by maintaining arc consistency, w.r.t. the constraint X < Y. - You work out the rest. The resulting domains are D’x = {1}, D’y = {2}, D’z = {3} No search is needed

35
General CP for Binary Constraints Algorithm AC3 contradiction false Q stack of all variables while Q is not empty and not contradiction do X UNSTACK(Q) For every variable Y adjacent to X do If REMOVE-ARC-INCONSISTENCIES(X,Y) then If Y’s domain is non-empty then STACK(Y,Q) Else return false
 For every variable Y adjacent to X do If REMOVE-ARC-INCONSISTENCIES(X,Y) then If Y’s domain is non-empty then STACK(Y,Q) Else return false")
36
Complexity Analysis of AC3 e = number of constraints (edges) (or n 2 where n is the # of variables) d = number of values per variable Each variable is inserted in Q up to d times REMOVE-ARC-INCONSISTENCY takes O(d 2 ) time AC3 takes O(ed 3 ) time to run
 (or n 2 where n is the # of variables) d = number of values per variable Each variable is inserted in Q up to d times REMOVE-ARC-INCONSISTENCY takes O(d 2 ) time AC3 takes O(ed 3 ) time to run")
37
Solving a CSP Search: can find solutions, but must examine non- solutions along the way Constraint Propagation: can rule out non-solutions, but this is not the same as finding solutions: Interweave constraint propagation and search Perform constraint propagation at each search step.

38
4-Queens Problem 1 3 2 4 3241 X1 {1,2,3,4} X3 {1,2,3,4} X4 {1,2,3,4} X2 {1,2,3,4}

39
4-Queens Problem 1 3 2 4 3241 X1 {1,2,3,4} X3 {1,2,3,4} X4 {1,2,3,4} X2 {1,2,3,4}

40
4-Queens Problem 1 3 2 4 3241 X1 {1,2,3,4} X3 {1,2,3,4} X4 {1,2,3,4} X2 {1,2,3,4}

41
4-Queens Problem 1 3 2 4 3241 X1 {1,2,3,4} X3 {1,2,3,4} X4 {1,2,3,4} X2 {1,2,3,4}

42
4-Queens Problem 1 3 2 4 3241 X1 {1,2,3,4} X3 {1,2,3,4} X4 {1,2,3,4} X2 {1,2,3,4}

43
4-Queens Problem 1 3 2 4 3241 X1 {1,2,3,4} X3 {1,2,3,4} X4 {1,2,3,4} X2 {1,2,3,4}

44
4-Queens Problem 1 3 2 4 3241 X1 {1,2,3,4} X3 {1,2,3,4} X4 {1,2,3,4} X2 {1,2,3,4}

45
4-Queens Problem 1 3 2 4 3241 X1 {1,2,3,4} X3 {1,2,3,4} X4 {1,2,3,4} X2 {1,2,3,4}

46
4-Queens Problem 1 3 2 4 3241 X1 {1,2,3,4} X3 {1,2,3,4} X4 {1,2,3,4} X2 {1,2,3,4}

47
Local search for CSPs Hill-climbing, simulated annealing typically work with "complete" states, i.e., all variables assigned To apply to CSPs: allow states with unsatisfied constraints operators reassign variable values Variable selection: randomly select any conflicted variable Value selection by min-conflicts heuristic: choose value that violates the fewest constraints

48
Summary Constraint Satisfaction Problems (CSP) CSP as a search problem Backtracking algorithm General heuristics Forward checking Constraint propagation (Arc consistency) Interweaving CP and backtracking
 CSP as a search problem Backtracking algorithm General heuristics Forward checking Constraint propagation (Arc consistency) Interweaving CP and backtracking")
Similar presentations





. What is search for? Assumptions: single agent, deterministic, fully observable, discrete environment Search.>")

 Chapter 6.1 – 6.4, except>")

>")

 Chapter 6.1 – 6.4, except 6.3.3>")


>")

 Standard search problem: – State is a “black box” – any data structure that.>")






