Download presentation
Presentation is loading. Please wait.

1
Presented by: Richard Wood

2
Goals and strategies Methods Performance evaluation Performance improvements Remaining Challenges

3
Observation Downtown traffic from parking delays Cheap street parking vs. expensive parking garages Solution Detailed information of parking availability Current Solution Fixed sensor networks. Proposed solution Drive-by monitoring Piggyback off of pre-existing infrastructure

4
The Vehicles Ultrasonic sensors – mounted on passenger door to detect vacant space through distance measurement GPS – localize vacant space Ultrasonic sensors Cheap. Potential reuse of sensors already existing on cars -- automated parking. Central Server Build real-time map of parking availability Clients query the server to find parking

5
Detection – slotted versus unslotted Space Count Occupancy Map – localization correction

6
Challenges: 1.Ultrasonic sensor: beam-width increases with distance. Erroneous echoes from objects at angles. 2.GPS errors

7
Sensor trace (width and depth) measured against a threshold to determine if a dip is a parked car. Threshold established from training data 2.52 meters width 89.7 inches Error rate: 12.4%

8
Slotted algorithm – N parking spaces filled Unslotted algorithm – D space between cars Potential parking spaces – based on threshold Difficult: variable space between cars Need to be more precise with imprecise sensors

9
Evaluation: Webcam Time stamped – actual presence of car compared to data from sensors Missed detections and false positives Tradeoff: Detection vs accuracy Slotted Unslotted

10
Parking spaces need to be mapped to reference map Accurate localization needed GPS error rates ~5-10 meters Increase accuracy through error correlation

11
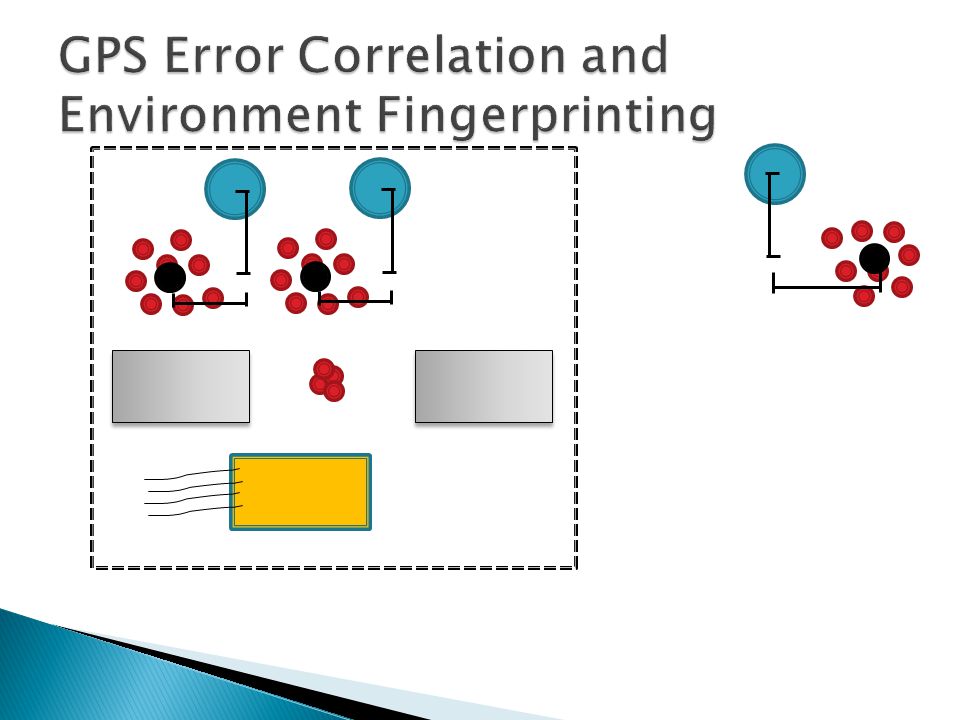
Observation: GPS error is correlated over short distance Tag stationary objects with a GPS, errors are large Correct the errors by knowing the location of the fixed objects and taking offset of the mean GPS location of the object Correlate locations between objects Limited window of correction

13
Multilane roads – sensors will detect other cars rather than or objects other than parking spaces. Speed limit – ultrasonic sensor limits the speed of the car due to sampling at the speed of sound. False data – Reflections of the sound waves may come from an angle making the data not representative of whether a car is at a certain location perpendicular to the cars path.

Similar presentations