Download presentation
Presentation is loading. Please wait.

1
SuperSmart Crane Controller Ziyad N. Masoud and Ali H. Nayfeh Department of Engineering Science and Mechanics Virginia Polytechnic Institute and State University

2
Introduction – A nonlinear feedback SuperSmart Crane Controller (SSC Controller) has been developed at Virginia Tech to suppress cargo sway in all types of commercial and military cranes – The SSC Controller has been applied to computer models of a ship-mounted boom crane, a land- based rotary crane, and a 65-ton container crane – Experimental validation has been performed on scaled models of a ship-mounted boom crane and a land-based rotary crane
 has been developed at Virginia Tech to suppress cargo sway in all types of commercial and military cranes – The SSC Controller has been applied to computer models of a ship-mounted boom crane, a land- based rotary crane, and a 65-ton container crane – Experimental validation has been performed on scaled models of a ship-mounted boom crane and a land-based rotary crane")
3
Cargo Ship Lighter Vessel T-ACS Crane Ship-Mounted Cranes Ship-mounted cranes are used to transfer cargo from large container ships to lighter vessels when deep-water ports are not available

4
Objective of Ship-Mounted Control – will suppress cargo swinging and enable cargo transfer in heavy seas (Sea state 3 and above) – will not require major modifications to existing crane structures – which can be superimposed on the input of crane operators – will enable automatic safe landing of cargo on lighter ships Develop an active control system for a ship- mounted crane that
 – will not require major modifications to existing crane structures – which can be superimposed on the input of crane operators – will enable automatic safe landing of cargo on lighter ships Develop an active control system for a ship- mounted crane that")
5
Control Strategy Control of boom luff and slew angles, which are already actuated Control of boom luff and slew angles, which are already actuated Use the nonlinear SSC Controller scheme to create nonlinear damping of the payload pendulations Use the nonlinear SSC Controller scheme to create nonlinear damping of the payload pendulations

6
Worst-Case Scenario Because the roll and pitch motions appear as additive terms in the crane governing equations, the most critical conditions occur when the roll and pitch frequencies are approximately equal to the natural frequency of the cargo pendulation Because the roll and pitch motions appear as additive terms in the crane governing equations, the most critical conditions occur when the roll and pitch frequencies are approximately equal to the natural frequency of the cargo pendulation – Therefore, we drive the roll and pitch of the ship and the platform at the natural frequency of the cargo pendulation, thereby inducing primary resonance of the cargo Primary resonance at Primary resonance at Because the heave motion appears as a time-varying coefficient or multiplicative term in the crane governing equations, the most critical conditions occur when the heave frequency is approximately equal to twice the natural frequency of the cargo pendulation Because the heave motion appears as a time-varying coefficient or multiplicative term in the crane governing equations, the most critical conditions occur when the heave frequency is approximately equal to twice the natural frequency of the cargo pendulation – Therefore, we drive the heave of the ship and the platform at twice the natural frequency of the cargo pendulation, thereby inducing principal parametric resonance of the cargo Principal parametric resonance at Principal parametric resonance at

7
Computer Simulation The model dimensions are based on the Navys T-ACS crane ship The model dimensions are based on the Navys T-ACS crane ship The model is driven with critical sinusoidal excitations (worst-case scenario) in roll, heave, and pitch The model is driven with critical sinusoidal excitations (worst-case scenario) in roll, heave, and pitch The full nonlinear equations of motion, including the rigid-body motion of the load, are solved numerically The full nonlinear equations of motion, including the rigid-body motion of the load, are solved numerically
 in roll, heave, and pitch The model is driven with critical sinusoidal excitations (worst-case scenario) in roll, heave, and pitch The full nonlinear equations of motion, including the rigid-body motion of the load, are solved numerically The full nonlinear equations of motion, including the rigid-body motion of the load, are solved numerically")
8
Uncontrolled Response At the natural frequency of the cargo pendulation in both the roll and pitch modes of motion At the natural frequency of the cargo pendulation in both the roll and pitch modes of motion – The roll amplitude is 2º – The pitch amplitude is 1º At twice the natural frequency of the cargo pendulation in the heave motion At twice the natural frequency of the cargo pendulation in the heave motion – The heave amplitude is 1 ft To simulate the problem of cargo handling in moderate to high seas, while hoisting a payload, we excited the computer ship model sinusoidally

9
Uncontrolled Response

10
Planar Controllers Most of the current control strategies attempt to suppress payload pendulations in one plane Most of the current control strategies attempt to suppress payload pendulations in one plane To simulate the effect of ignoring the other pendulation plane, in the following clip, we apply the SSC Controller to one pendulation plane To simulate the effect of ignoring the other pendulation plane, in the following clip, we apply the SSC Controller to one pendulation plane – The same excitation conditions used in the uncontrolled simulation are applied to the computer model of the crane ship

11
Planar Controllers

12
We shift the pitch frequency away from the natural frequency of the payload We shift the pitch frequency away from the natural frequency of the payload We keep the rest of the excitation conditions as in the uncontrolled simulation We keep the rest of the excitation conditions as in the uncontrolled simulation We command the crane to perform a 90º slewing action and back every 40 sec We command the crane to perform a 90º slewing action and back every 40 sec Assuming that the pitch excitation frequency is away from the natural frequency of the cargo pendulation and that it should not introduce significant energy to the cargo

13
Planar Controllers

14
Remarks on Planar Controllers The results of the previous two simulations show that planar controllers are incapable of suppressing general payload pendulations The results of the previous two simulations show that planar controllers are incapable of suppressing general payload pendulations Therefore, a full three-dimensional controller is required Therefore, a full three-dimensional controller is required

15
3D SSC Controller The 3D SSC Controller is applied to the crane The 3D SSC Controller is applied to the crane The most critical excitation conditions, as in the uncontrolled simulation, are applied to the computer model of the crane ship The most critical excitation conditions, as in the uncontrolled simulation, are applied to the computer model of the crane ship The following clip shows the response of the controlled cargo for a stationary crane The following clip shows the response of the controlled cargo for a stationary crane

16
3D SSC Controller

17
With the 3D SSC Controller still applied to the crane, and With the 3D SSC Controller still applied to the crane, and The same most critical excitation conditions, as in the uncontrolled simulation, are applied to the computer model of the crane ship The same most critical excitation conditions, as in the uncontrolled simulation, are applied to the computer model of the crane ship The following clip shows the response of the controlled cargo for a crane performing a 90º slewing action and back every 40 sec The following clip shows the response of the controlled cargo for a crane performing a 90º slewing action and back every 40 sec

18
3D SSC Controller (Slewing crane)
")
19
Performance of 3D SSC Controller (in the Presence of Initial Conditions ICs) With the 3D SSC Controller still applied to the crane, and With the 3D SSC Controller still applied to the crane, and The same most critical excitation conditions, as in the uncontrolled simulation, are applied to the computer model of the crane ship The same most critical excitation conditions, as in the uncontrolled simulation, are applied to the computer model of the crane ship The following clip shows the response of the controlled cargo to an initial position disturbance of 60º The following clip shows the response of the controlled cargo to an initial position disturbance of 60º
 With the 3D SSC Controller still applied to the crane, and With the 3D SSC Controller still applied to the crane, and The same most critical excitation conditions, as in the uncontrolled simulation, are applied to the computer model of the crane ship The same most critical excitation conditions, as in the uncontrolled simulation, are applied to the computer model of the crane ship The following clip shows the response of the controlled cargo to an initial position disturbance of 60º The following clip shows the response of the controlled cargo to an initial position disturbance of 60º")
20
Performance of 3D SSC Controller (in the Presence of Initial Conditions ICs)
")
21
Controlled vs. Uncontrolled Response (Fixed crane orientation)
")
23
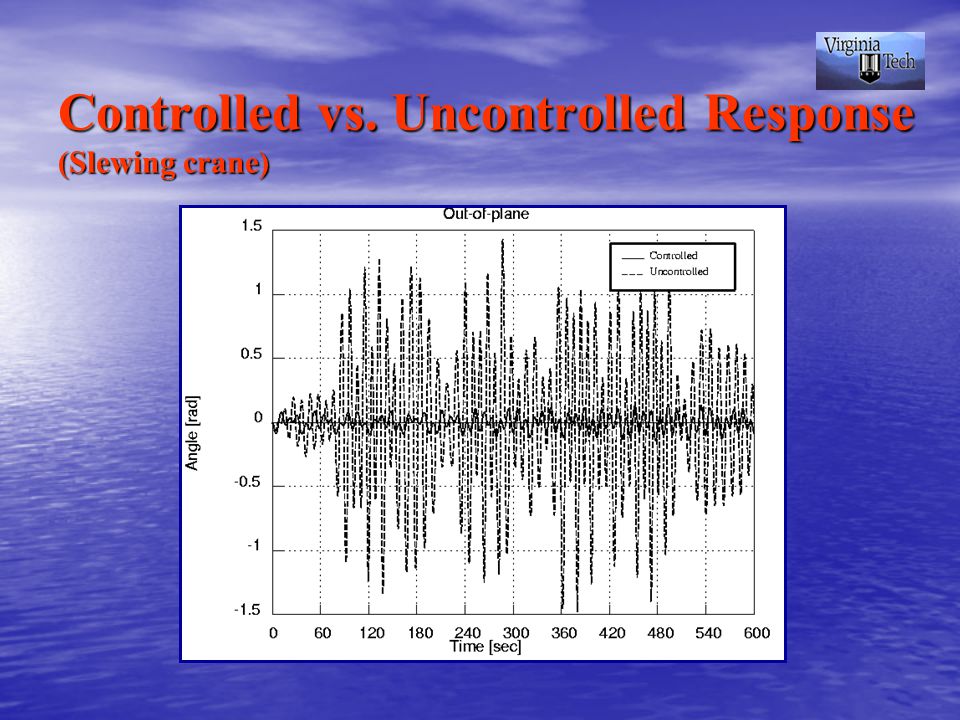
Controlled vs. Uncontrolled Response (Slewing crane)
")
25
Controlled vs. Uncontrolled Response (Performance in Presence of Initial Conditions)
")
26
Experimental Demonstration We built a 3 DOF ship- motion simulator platform We built a 3 DOF ship- motion simulator platform – It is capable of performing general pitch, roll, and heave motions We mounted a 1/24 scale model of a ship-mounted crane on the platform We mounted a 1/24 scale model of a ship-mounted crane on the platform We are using a PC to apply the SSC Controller and drive the crane We are using a PC to apply the SSC Controller and drive the crane

27
Uncontrolled Response The ship simulator platform is excited sinusoidally at The ship simulator platform is excited sinusoidally at – The natural frequency of the cargo pendulation in both the roll and pitch modes of motion The roll amplitude is 1º The roll amplitude is 1º The pitch amplitude is 0.5º The pitch amplitude is 0.5º – Twice the natural frequency of the cargo pendulation in the heave motion The heave amplitude is 0.5 in The heave amplitude is 0.5 in

28
Uncontrolled Response

29
Controlled Response The SSC Controller is activated The SSC Controller is activated The ship simulator platform is excited sinusoidally at The ship simulator platform is excited sinusoidally at – The natural frequency of the payload pendulum in both the roll and pitch modes of motion The roll amplitude is 1º The roll amplitude is 1º The pitch amplitude is 0.5º The pitch amplitude is 0.5º – Twice the natural frequency of the payload pendulum in the heave motion The heave amplitude is 0.5 in The heave amplitude is 0.5 in

30
Controlled Response

31
Controlled Response to Larger Platform Motions The SSC Controller is activated The SSC Controller is activated The ship simulator platform is still excited sinusoidally at The ship simulator platform is still excited sinusoidally at – The natural frequency of the payload pendulum in both the roll and pitch modes of motion The roll amplitude is increased to 2º The roll amplitude is increased to 2º The pitch amplitude is increased to 1º The pitch amplitude is increased to 1º – Twice the natural frequency of the payload pendulum in the heave motion The heave amplitude is 0.5 in The heave amplitude is 0.5 in

32
Controlled Response to Larger Platform Motions

33
Controlled Response (Slewing crane) The SSC Controller is activated The SSC Controller is activated The ship simulator platform is excited sinusoidally at The ship simulator platform is excited sinusoidally at – The natural frequency of the payload pendulum in both the roll and pitch modes of motion The roll amplitude is 1º The roll amplitude is 1º The pitch amplitude is 0.5º The pitch amplitude is 0.5º – Twice the natural frequency of the payload pendulum in the heave motion The heave amplitude is 0.5 in The heave amplitude is 0.5 in After 8 seconds, the crane is commanded to perform a 90º slewing action every 8 sec After 8 seconds, the crane is commanded to perform a 90º slewing action every 8 sec
 The SSC Controller is activated The SSC Controller is activated The ship simulator platform is excited sinusoidally at The ship simulator platform is excited sinusoidally at – The natural frequency of the payload pendulum in both the roll and pitch modes of motion The roll amplitude is 1º The roll amplitude is 1º The pitch amplitude is 0.5º The pitch amplitude is 0.5º – Twice the natural frequency of the payload pendulum in the heave motion The heave amplitude is 0.5 in The heave amplitude is 0.5 in After 8 seconds, the crane is commanded to perform a 90º slewing action every 8 sec After 8 seconds, the crane is commanded to perform a 90º slewing action every 8 sec")
34
Controlled Response (Slewing crane)
")
35
Controlled Response to Larger Platform Motions (Slewing crane) The SSC Controller is activated The SSC Controller is activated The ship simulator platform is excited sinusoidally at The ship simulator platform is excited sinusoidally at – The natural frequency of the payload pendulum in both the roll and pitch modes of motion The roll amplitude is 2º The roll amplitude is 2º The pitch amplitude is 1º The pitch amplitude is 1º – Twice the natural frequency of the payload pendulum in the heave motion The heave amplitude is 0.5 in The heave amplitude is 0.5 in After 8 seconds, the crane is commanded to perform a 90º slewing action every 8 sec After 8 seconds, the crane is commanded to perform a 90º slewing action every 8 sec
 The SSC Controller is activated The SSC Controller is activated The ship simulator platform is excited sinusoidally at The ship simulator platform is excited sinusoidally at – The natural frequency of the payload pendulum in both the roll and pitch modes of motion The roll amplitude is 2º The roll amplitude is 2º The pitch amplitude is 1º The pitch amplitude is 1º – Twice the natural frequency of the payload pendulum in the heave motion The heave amplitude is 0.5 in The heave amplitude is 0.5 in After 8 seconds, the crane is commanded to perform a 90º slewing action every 8 sec After 8 seconds, the crane is commanded to perform a 90º slewing action every 8 sec")
36
Controlled Response to Larger Platform Motions (Slewing crane)
")
37
Performance of the Controller (in the presence of Initial Conditions) To simulate an initial disturbance, the SSC Controller is activated 10 seconds after experiment begins To simulate an initial disturbance, the SSC Controller is activated 10 seconds after experiment begins The ship simulator platform is excited sinusoidally at The ship simulator platform is excited sinusoidally at – The natural frequency of the payload pendulum in both the roll and pitch modes of motion The roll amplitude is 1º The roll amplitude is 1º The pitch amplitude is 0.5º The pitch amplitude is 0.5º – Twice the natural frequency of the payload pendulum in the heave motion The heave amplitude is 0.5 in The heave amplitude is 0.5 in
 To simulate an initial disturbance, the SSC Controller is activated 10 seconds after experiment begins To simulate an initial disturbance, the SSC Controller is activated 10 seconds after experiment begins The ship simulator platform is excited sinusoidally at The ship simulator platform is excited sinusoidally at – The natural frequency of the payload pendulum in both the roll and pitch modes of motion The roll amplitude is 1º The roll amplitude is 1º The pitch amplitude is 0.5º The pitch amplitude is 0.5º – Twice the natural frequency of the payload pendulum in the heave motion The heave amplitude is 0.5 in The heave amplitude is 0.5 in")
38
Performance of Controller (in presence of Initial Conditions)
")
39
Tower Cranes The SSC Controller is added to and tested on a scaled model of a tower crane The SSC Controller is added to and tested on a scaled model of a tower crane The crane is tested in both the rotary and gantry modes of operation The crane is tested in both the rotary and gantry modes of operation A PC is used to apply the controller and drive the crane A PC is used to apply the controller and drive the crane

40
Rotary Mode Test Maximum rotational velocity Maximum rotational velocity Rotational acceleration Rotational acceleration

41
Uncontrolled Response

42
Controlled Response

43
Gantry Mode Test Maximum transverse velocity Maximum transverse velocity Transverse acceleration Transverse acceleration

44
Uncontrolled Response

45
Controlled Response

46
Container Crane

47
Container Cranes The SSC Controller was applied to a full-scale computer model of a container crane The SSC Controller was applied to a full-scale computer model of a container crane The combined weight of the container and the spreader bar is 80 tons The combined weight of the container and the spreader bar is 80 tons Three controlled and uncontrolled loading and unloading cases were simulated Three controlled and uncontrolled loading and unloading cases were simulated The controller was tuned to meet the Japanese standards The controller was tuned to meet the Japanese standards – The sway of the hoisted load must drop to less than 50mm within 5 seconds after the trolley stops

48
Case 1 A container is moved from a truck 35m below the trolley to a waiting ship A container is moved from a truck 35m below the trolley to a waiting ship The final position on the ship is 50m away from the truck The final position on the ship is 50m away from the truck The container is hoisted 15m in the first 10 seconds of the transport maneuver The container is hoisted 15m in the first 10 seconds of the transport maneuver The trolley covers the 50m distance in 21.5 seconds The trolley covers the 50m distance in 21.5 seconds The operator input commands are step accelerations and decelerations with a rise time of 200ms The operator input commands are step accelerations and decelerations with a rise time of 200ms

49
Case 1: Commanded Cargo Trajectory

50
Case 1: Commanded Traverse Acceleration

51
Case 1: Commanded Hoist Acceleration

52
Uncontrolled Simulation The animation is twice as fast as The animation is twice as fast as the actual speed the actual speed

53
Controlled Simulation The animation is twice as fast as The animation is twice as fast as the actual speed the actual speed

54
Case 1: Cargo Motion

55
Case 1: Cargo Sway

56
Case 1: A Zoom on Controlled Cargo Sway

57
Case 1: Cargo Sway (Relative to Trolley)
")
58
Case 1: A Zoom on Cargo Sway (Relative to Trolley)
")
59
Case 1: Trolley Velocity

60
Case 1: Trolley Acceleration

61
Case 1: Trolley Jerk

62
Case 1: Tension in the Cables

63
Case 1: Horizontal Force on Trolley (Caused by Cable Tensions)
")
64
Case 2 A container is moved from a position 20m below the trolley on a ship to a waiting truck A container is moved from a position 20m below the trolley on a ship to a waiting truck The truck is 50m away from the container position on the ship The truck is 50m away from the container position on the ship The trolley covers the 50m distance in 21.5 seconds. The trolley covers the 50m distance in 21.5 seconds. After 12 seconds from the start of the transport maneuver, the operator begins lowering the container. After 12 seconds from the start of the transport maneuver, the operator begins lowering the container. The container is deposited on the truck after 28.5 second from the start of the maneuver The container is deposited on the truck after 28.5 second from the start of the maneuver The operator input commands are step accelerations and decelerations with a rise time of 200ms The operator input commands are step accelerations and decelerations with a rise time of 200ms

65
Case 2: Commanded Cargo Trajectory

66
Case 2: Commanded Traverse Acceleration

67
Case 2: Commanded Hoist Acceleration

68
Uncontrolled Simulation The animation is twice as fast as The animation is twice as fast as the actual speed the actual speed

69
Controlled Simulation The animation is twice as fast as The animation is twice as fast as the actual speed the actual speed

70
Case 2: Cargo Motion

71
Case 2: Cargo Sway

72
Case 2: A Zoom on Controlled Cargo Sway

73
Case 2: Cargo Sway (Relative to Trolley)
")
74
Case 2: A Zoom on Cargo Sway (Relative to Trolley)
")
75
Case 2: Trolley Velocity

76
Case 2: Trolley Acceleration

77
Case 2: Trolley Jerk

78
Case 2: Tension in the Cables

79
Case 2: Horizontal Force on Trolley (Caused by Cable Tensions)
")
80
Case 3 A container is moved from a position 35m below the trolley on a ship to a waiting truck A container is moved from a position 35m below the trolley on a ship to a waiting truck The truck is 50m away from the container position on the ship The truck is 50m away from the container position on the ship The trolley covers the 50m distance in 21.5 seconds The trolley covers the 50m distance in 21.5 seconds The container is hoisted 15m in the first 10 seconds of the maneuver The container is hoisted 15m in the first 10 seconds of the maneuver Twelve seconds later, the operator begins lowering the container Twelve seconds later, the operator begins lowering the container The container is deposited on the truck after 28.5 seconds from the start of the maneuver The container is deposited on the truck after 28.5 seconds from the start of the maneuver The operator input commands are step accelerations and decelerations with a rise time of 200ms The operator input commands are step accelerations and decelerations with a rise time of 200ms

81
Case 3: Commanded Cargo Trajectory

82
Case 3: Commanded Traverse Acceleration

83
Case 3: Commanded Hoist Acceleration

84
Uncontrolled Simulation The animation is twice as fast as The animation is twice as fast as the actual speed the actual speed

85
Controlled Simulation The animation is twice as fast as The animation is twice as fast as the actual speed the actual speed

86
Case 3: Cargo Motion

87
Case 3: Cargo Sway

88
Case 3: A Zoom on Controlled Cargo Sway

89
Case 3: Cargo Sway (Relative to Trolley)
")
90
Case 3: A Zoom on Cargo Sway (Relative to Trolley)
")
91
Case 3: Trolley Velocity

92
Case 3: Trolley Acceleration

93
Case 3: Trolley Jerk

94
Case 3: Tension in the Cables

95
Case 3: Horizontal Force on Trolley (Caused by the Cable Tensions)
")
96
Concluding Remarks The nonlinear SSC Controller is an effective means of reducing cargo pendulations in crane systems The nonlinear SSC Controller is an effective means of reducing cargo pendulations in crane systems The SSC Controller is applicable to the all common types of cranes The SSC Controller is applicable to the all common types of cranes The SSC Controller is capable of absorbing base excitation energy before reaching the hoisted cargo The SSC Controller is capable of absorbing base excitation energy before reaching the hoisted cargo Significant reductions in the pendulation angles can be achieved with relatively small control inputs Significant reductions in the pendulation angles can be achieved with relatively small control inputs Most existing crane actuators can be used for the purpose of applying the controller Most existing crane actuators can be used for the purpose of applying the controller Only a few sensors and a PC (chip) are needed Only a few sensors and a PC (chip) are needed
 are needed Only a few sensors and a PC (chip) are needed")
97
Concluding Remarks (cont.) The cost of the SSC Controller system is low because it does not require modifications to existing crane structures The cost of the SSC Controller system is low because it does not require modifications to existing crane structures The system can be automated and hence the operators do not need to use pedals The system can be automated and hence the operators do not need to use pedals The SSC Controller is superimposed on the commands of crane operators The SSC Controller is superimposed on the commands of crane operators The SSC Controller is capable of absorbing the inertial excitation energy resulting from the operator commands The SSC Controller is capable of absorbing the inertial excitation energy resulting from the operator commands
 The cost of the SSC Controller system is low because it does not require modifications to existing crane structures The cost of the SSC Controller system is low because it does not require modifications to existing crane structures The system can be automated and hence the operators do not need to use pedals The system can be automated and hence the operators do not need to use pedals The SSC Controller is superimposed on the commands of crane operators The SSC Controller is superimposed on the commands of crane operators The SSC Controller is capable of absorbing the inertial excitation energy resulting from the operator commands The SSC Controller is capable of absorbing the inertial excitation energy resulting from the operator commands")
98
Concluding Remarks (cont.) The end point of the transport maneuver need not be pre-defined The end point of the transport maneuver need not be pre-defined The SSC Controller is capable of handling an operator stop command at any random time The SSC Controller is capable of handling an operator stop command at any random time
 The end point of the transport maneuver need not be pre-defined The end point of the transport maneuver need not be pre-defined The SSC Controller is capable of handling an operator stop command at any random time The SSC Controller is capable of handling an operator stop command at any random time")
99
Contact Information Ali Nayfeh Ali Nayfeh – Department of Engineering Science and Mechanics, MC 0219 – Virginia Polytechnic Institute and State University – Blacksburg, VA 24061 – Phone: (540) 231-5453 – Fax: (540) 231-2290 – Email: anayfeh@vt.edu anayfeh@vt.edu – http://www.esm.vt.edu/~anayfeh/ http://www.esm.vt.edu/~anayfeh/ Ziyad Masoud Ziyad Masoud – Department of Engineering Science and Mechanics, MC 0219 – Virginia Polytechnic Institute and State University – Blacksburg, VA 24061 – Phone: (540) 231-1227 – Fax: (540) 231-2290 – Email: zmasoud@vt.edu zmasoud@vt.edu
 – Fax: (540) – – Ziyad Masoud Ziyad Masoud – Department of Engineering Science and Mechanics, MC 0219 – Virginia Polytechnic Institute and State University – Blacksburg, VA – Phone: (540) – Fax: (540) –")
Similar presentations


















>")

