Download presentation
Presentation is loading. Please wait.

1
ABS Control Project Ondrej Ille Pre-bachelor Project

2
What is ABS in real world? Advantages of ABS: - effective braking at different surfaces - anti block system for car controllability Disadvantages of ABS: - longer braking distance

3
ABS Laboratory model :

4
Angle encoders for measuring wheel positions Derivations of outputs gives angular velocities Disc Brake input : PWM Motor Input No Dynamometers !!!

5
Simplified Model Scheme:

6
System described by equations, based on second Newtons law: Sum of the moments applied to wheel is proportional to angular acceleration of the wheel. Coefficient of the proportion is Moment of Inertia

8
Slip – represents relative difference of wheel velocities: Main controlled parameter, non-linear When choosing x 1,x 2 State variables, Slip is inversely proportional to State variables Different definition according to signs of x1 x2

9
Friction force is function of Slip: In INTECO model approximated by: Substitution of parameters and obtaining general model

10
Where c 11 to c 31 are coefficients of the model, provided by INTECO together with the system Non-Linear State model Is the description by c ij and b reliable?? Experiments to compare reality and model described by State equations and coefficients

11
Initial condition response without braking:

12
Response with the braking:

13
Simulated Slip doesnt respond to real Slip Incorrect function coefficients: New identification is not possible due to no dynamometers in model For control we have to accept the model which is given by INTECO

14
Friction coefficient vs slip in Simulation model:

15
Friction coefficient vs Slip in real systems [1] :
![Friction coefficient vs Slip in real systems [1] :](http://images.slideplayer.com/5/1578496/slides/slide_15.jpg "Friction coefficient vs Slip in real systems [1] :")
16
ABS control intends to keep Slip at value with maximal friction coefficient ! Then Friction force is maximal since normal force is given by mass of the car: Controllability of the car: Lowest possible Slip with maximal friction coefficient Usual approach: Gain scheduling control

17
Problem in our design due to friction coefficient function Proposed approach: setting evaluating parameters! Evaluating parameters: Braking Distance Slip Ratio – ideally expresses the car controllability

18
Classical ABS [1] : friction coefficient function has strong affect on braking distance INTECO simulation model: friction coefficient function has lower affect on braking distance Braking distance is more affected by amount of time when the Slip is zero. For this reason we use different reference values
![Classical ABS [1] : friction coefficient function has strong affect on braking distance INTECO simulation model: friction coefficient function has lower affect on braking distance Braking distance is more affected by amount of time when the Slip is zero.](http://images.slideplayer.com/5/1578496/slides/slide_18.jpg "For this reason we use different reference values.")
19
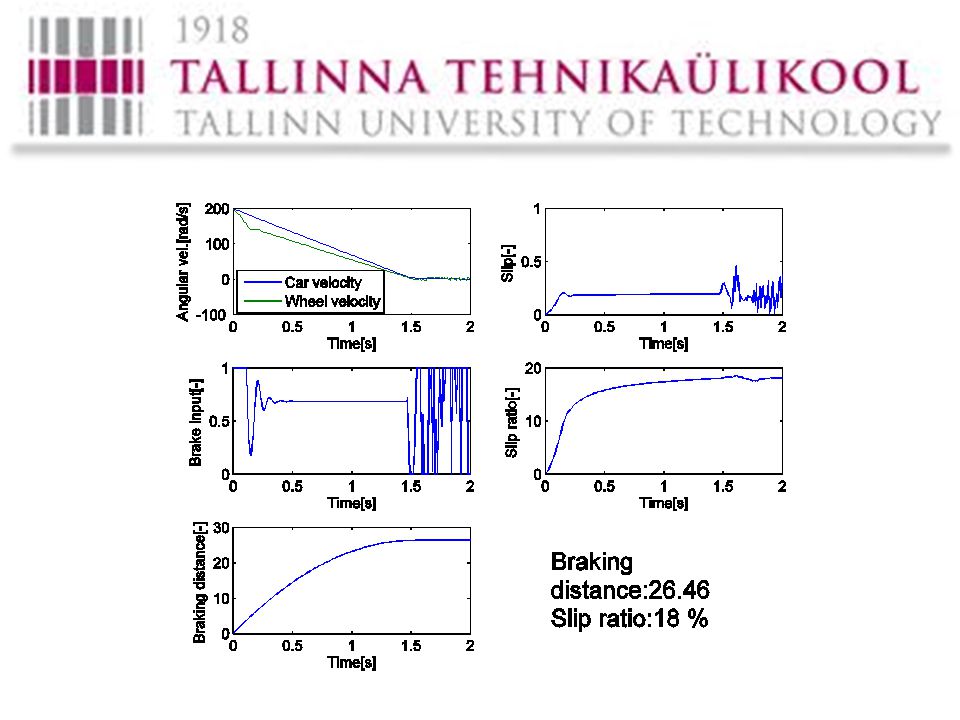
Evaluation parameters tested with simple Relay controller:

20
Setting the condition for maximal braking distance and examining Slip Ratio:

21
We obtain Setting for Relay controller:

22
Different controllers: PID controller – linear control of non-linear system Non-linear PID controller :

23
Non-linear function :

24
Tuning of controllers (in simulations) : Ziegler –Nichols method (appropriate for linear systems.) Trial and Error Cohen Coons method Controllers tuned to follow reference value or to achieve best evaluating parameters values
 : Ziegler –Nichols method (appropriate for linear systems.) Trial and Error Cohen Coons method Controllers tuned to follow reference value or to achieve best evaluating parameters values")
25
Classical PID:

27
Non-Linear PID :

28
Difference between Linear and Non-linear PID:

29
Applying controllers to reality with problems: Time delay Non – fitting coefficients of controllers The difference between the model and reality causes problems in prediction of delay Solutions: Retuning with real model Compensating time delay

30
Smiths predictor to compensate time delay:

31
Types of tested controllers in reality: Relay, Linear PID, Non-linear PID Without delay prediction, With Smiths predictor, With INTECO predictor Tuning to achieve best Braking distance, Slip Ratio, or follow the reference value

32
Relay without prediction:

33
Linear PID for 0.35 reference:

34
Non-Linear PID for 0.35 reference:

35
Linear vs. Non-Linear PID:

37
Conclusion: For optimal Braking Distance and Slip Ratio the Non-linear PID with Smiths predictor reached the best result Is the performance truly so important? What about following the reference? Isnt simpler controller (Relay) better??
 better .")
Similar presentations














 Jean-Paul Busselaar MSc. thesis.>")







