Download presentation
Presentation is loading. Please wait.

1
Hybrid Simulation with On-line Updating of Numerical Model Based on Measured Experimental Behavior M. Javad Hashemi, Armin Masroor, and Gilberto Mosqueda University at Buffalo Quake Summit 2012 July 12, 2012

2
Introduction

3
System Identification – Determine system parameters given the input and output In this application, the system output is only known to the current simulation time Early identification of some parameters is difficult – cannot calibrate yield force until structure actually yields Example: Extracting Initial Stiffness, Yield Force and Post Elastic Stiffness Ratio From Experimental Response Introduction

4
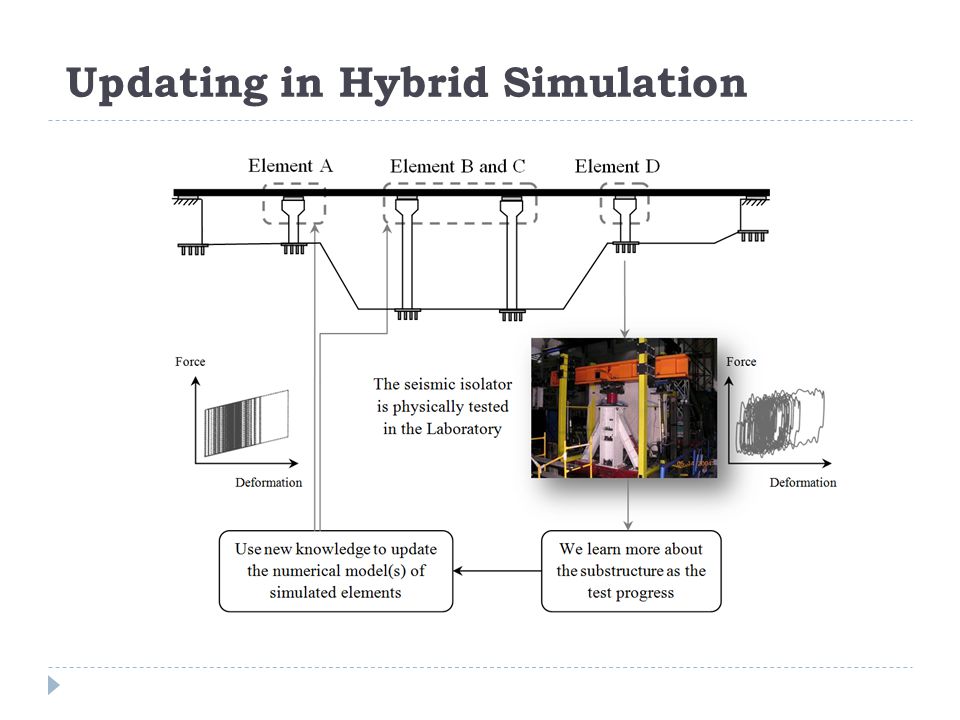
In hybrid simulation, it is often assumed that a reliable model of numerical substructure exists During a hybrid simulation, experimental data is gathered from experimental structural components – other similar components may be present throughout numerical substructure OBJECTIVE: Use on-line measurements of experimental substructure to update numerical models of similar components (Elnashai et al. 2008) Could experience similar stress/strain demands Could experience very different demands, but likely at lower amplitudes (Test component experiencing largest demands) Updating in Hybrid Simulation
 Could experience similar stress/strain demands Could experience very different demands, but likely at lower amplitudes (Test component experiencing largest demands) Updating in Hybrid Simulation.")
6
Algorithm Numerical Substructure may contain models to be updated Auxiliary model of experiment to calibrate model parameters Other tasks focus on when and what to update

7
Online Updating Challenges Experimental Issues: The on-line identification process should instantaneously and automatically track the critical characteristics of the system and their variations as time proceeds, without requiring any major action by the researcher during the test. Measurement data are usually contaminated by errors (noise) that can substantially influence the accuracy of the identification result. In online schemes, it is difficult to manipulate the input–output data as can be done for offline applications.
 that can substantially influence the accuracy of the identification result. In online schemes, it is difficult to manipulate the input–output data as can be done for offline applications..")
8
Online Updating Challenges Numerical Issues: For effective on-line identification schemes, it is necessary to develop a reasonable non-linear model that is able to provide a good representation of the system behavior. Independent of the system to be identified, online identification algorithm must be adaptable to capture parameter changes as time progresses (such as sudden fracture). Parameters should converge smoothly and rapidly to the proper parameter values.
. Parameters should converge smoothly and rapidly to the proper parameter values..")
9
Hysteretic Model Smooth Hysteretic Model: Has been used by several researchers for simulating and identifying hysteretic system response Model is highly nonlinear and has nine control parameters including stiffness and strength degradation.

10
Parameter Identification Objective: Find the best-fit parameters to minimize the error function E defined as: Note: Auxiliary Numerical Model and Experimental Model have identical deformation demands

11
Parameter Identification Techniques Downhill Simplex : The Downhill Simplex method is a multidimensional optimization method which uses geometric relationships to aid in finding function minimums The Simplex method is not sensitive to small measurement noise and does not tend to divergence The code is ready as a function in Matlab and with some slight modification it is ready to use Actuators are on hold while finding the updated parameters Limited number of updating which sometimes causes non- uniform hysteresis

12
Parameter Identification Techniques Unscented Kalman Filter: UKF is a recursive algorithm for estimating the optimal state of a nonlinear system from noise-corrupted data To identify the unknown parameters of a system, these parameters should be added to the states of the system to be estimated using experimental substructure response. The updating is instantaneously (each step) Converges smoothly and rapidly Actuators work continuously
 Converges smoothly and rapidly Actuators work continuously.")
13
Structural Model One Bay Frame Structure Element 1: Experimental substructure Element 2: Numerical substructure similar to Element 1 Element 3: Spring that varies demands between Element 1 and Element 2 NumericalExperimental

14
Experimental Substructure

15
Hybrid Simulation Architecture

16
One Bay Frame Structural Properties Experimental ControlxPCtarget Period (sec)0.5182 Elastic Stiffness (kips/in)5.88 Mass for Each DoF (kips/g)0.04 Integration SchemeNewmark Explicit Integration Time Step (sec)0.005 Ground Motion Time Step (sec)0.02 Simulation Time Step (sec)0.25 El Centro
 Elastic Stiffness (kips/in)5.88 Mass for Each DoF (kips/g)0.04 Integration SchemeNewmark Explicit Integration Time Step (sec)0.005 Ground Motion Time Step (sec)0.02 Simulation Time Step (sec)0.25 El Centro")
17
Test Protocol Test Series 1:Verification of Parameter Identification Techniques: Mass 1 and 2 are equivalent and Element 3 is rigid: Deformation demands in Element 1 and 2 are identical. Online calibration of the Element 2 using parameter identification techniques, ideally, should produce a hysteresis identical to Element 1. Test Series 2: Implementation in General Condition: Element 3 is flexible, Mass 1 and 2 are different: Deformation demands in Element 1 and 2 are different Although elements 1 and 2 may have similar properties, they experience different deformation demands and damage at different times

18
Test Series 1 [Identical Deformation Demands] Reference Model: Reference Model: Response of Element 2 is replaced by measured behavior for Element 1 since both have the same demands
![Test Series 1 [Identical Deformation Demands] Reference Model: Reference Model: Response of Element 2 is replaced by measured behavior for Element 1 since both have the same demands](http://images.slideplayer.com/5/1508646/slides/slide_18.jpg "Test Series 1 [Identical Deformation Demands] Reference Model: Reference Model: Response of Element 2 is replaced by measured behavior for Element 1 since both have the same demands")
19
Test Series 1 [Identical Deformation Demands] Calibration of the Experimental Response Calibration:
![Test Series 1 [Identical Deformation Demands] Calibration of the Experimental Response Calibration:](http://images.slideplayer.com/5/1508646/slides/slide_19.jpg "Test Series 1 [Identical Deformation Demands] Calibration of the Experimental Response Calibration:")
20
Test Series 1 [Identical Deformation Demands] Initial Values For Updating Test Initial Values: No stiffness or strength degradation assigned to the numerical model No updating is implemented
![Test Series 1 [Identical Deformation Demands] Initial Values For Updating Test Initial Values: No stiffness or strength degradation assigned to the numerical model No updating is implemented](http://images.slideplayer.com/5/1508646/slides/slide_20.jpg "Test Series 1 [Identical Deformation Demands] Initial Values For Updating Test Initial Values: No stiffness or strength degradation assigned to the numerical model No updating is implemented")
21
Test Series 1 [Identical Deformation Demands] Results for updating in real time: Downhill SimplexUnscented Kalman Filter
![Test Series 1 [Identical Deformation Demands] Results for updating in real time: Downhill SimplexUnscented Kalman Filter](http://images.slideplayer.com/5/1508646/slides/slide_21.jpg "Test Series 1 [Identical Deformation Demands] Results for updating in real time: Downhill SimplexUnscented Kalman Filter")
22
Test Series 2 [Different Deformation Demands] Reference Model: Reference Model: Response of Element 2 is Based on the Calibration of Experimental Element Response without degradation
![Test Series 2 [Different Deformation Demands] Reference Model: Reference Model: Response of Element 2 is Based on the Calibration of Experimental Element Response without degradation](http://images.slideplayer.com/5/1508646/slides/slide_22.jpg "Test Series 2 [Different Deformation Demands] Reference Model: Reference Model: Response of Element 2 is Based on the Calibration of Experimental Element Response without degradation")
23
Test Series 2 [Different Deformation Demands] Results: Comparison of Element 2 Hysteresis For Different Tests
![Test Series 2 [Different Deformation Demands] Results: Comparison of Element 2 Hysteresis For Different Tests](http://images.slideplayer.com/5/1508646/slides/slide_23.jpg "Test Series 2 [Different Deformation Demands] Results: Comparison of Element 2 Hysteresis For Different Tests")
24
Test Series 2 [Different Deformation Demands] Results: Comparison of Element 2 (=DOF2) Force History For Different Tests
![Test Series 2 [Different Deformation Demands] Results: Comparison of Element 2 (=DOF2) Force History For Different Tests](http://images.slideplayer.com/5/1508646/slides/slide_24.jpg "Test Series 2 [Different Deformation Demands] Results: Comparison of Element 2 (=DOF2) Force History For Different Tests")
25
Test Series 2 [Different Deformation Demands] Results: Comparison of Element 2 (=DOF2) Displacement History For Different Tests
![Test Series 2 [Different Deformation Demands] Results: Comparison of Element 2 (=DOF2) Displacement History For Different Tests](http://images.slideplayer.com/5/1508646/slides/slide_25.jpg "Test Series 2 [Different Deformation Demands] Results: Comparison of Element 2 (=DOF2) Displacement History For Different Tests")
26
Test Series 2 [Different Deformation Demands] Online Parameter Calibration: Note: Initial values for the updating parameters for the UKF Method were obtained from test with no updating. Updated Parameter Values In UKF Identification Technique Updating Parameters:
![Test Series 2 [Different Deformation Demands] Online Parameter Calibration: Note: Initial values for the updating parameters for the UKF Method were obtained from test with no updating.](http://images.slideplayer.com/5/1508646/slides/slide_26.jpg "Updated Parameter Values In UKF Identification Technique Updating Parameters:.")
27
Test Series 2 [Different Deformation Demands] Online Parameter Calibration: Updated Parameter Values In UKF Identification Technique
![Test Series 2 [Different Deformation Demands] Online Parameter Calibration: Updated Parameter Values In UKF Identification Technique](http://images.slideplayer.com/5/1508646/slides/slide_27.jpg "Test Series 2 [Different Deformation Demands] Online Parameter Calibration: Updated Parameter Values In UKF Identification Technique")
28
Test Series 2 [Different Deformation Demands] Online Parameter Calibration: Updated Parameter Values In UKF Identification Technique
![Test Series 2 [Different Deformation Demands] Online Parameter Calibration: Updated Parameter Values In UKF Identification Technique](http://images.slideplayer.com/5/1508646/slides/slide_28.jpg "Test Series 2 [Different Deformation Demands] Online Parameter Calibration: Updated Parameter Values In UKF Identification Technique")
29
Test Series 2 [Different Deformation Demands] Online Parameter Calibration: Updated Parameter Values In UKF Identification Technique
![Test Series 2 [Different Deformation Demands] Online Parameter Calibration: Updated Parameter Values In UKF Identification Technique](http://images.slideplayer.com/5/1508646/slides/slide_29.jpg "Test Series 2 [Different Deformation Demands] Online Parameter Calibration: Updated Parameter Values In UKF Identification Technique")
32
Conclusion 1. A basic objective is to implement and advance the methodology of hybrid simulation with updating of the numerical substructure model(s) during the test and thereby better predict the response of inelastic structures more accurately. 2. An auxiliary numerical model was implemented to calibrate numerical model parameters. Different optimization techniques were examined to minimize the objective function, defined as the error between numerical and experimental substructure response. Both methods give relatively accurate estimates. 3. Hybrid simulation with updating can be implemented using common software such as OpenSEES and MATLAB®. Algorithms for updating process, time of implementing the updated parameters in numerical model and others can be coded by the researcher and used in the proposed framework. 4. The procedure was implemented here for a simple structural model, with more complex applications expected in the near future
 during the test and thereby better predict the response of inelastic structures more accurately. 2. An auxiliary numerical model was implemented to calibrate numerical model parameters. Different optimization techniques were examined to minimize the objective function, defined as the error between numerical and experimental substructure response. Both methods give relatively accurate estimates. 3. Hybrid simulation with updating can be implemented using common software such as OpenSEES and MATLAB®. Algorithms for updating process, time of implementing the updated parameters in numerical model and others can be coded by the researcher and used in the proposed framework. 4. The procedure was implemented here for a simple structural model, with more complex applications expected in the near future.")
33
Acknowledgements Research funding NEESR CMMI-0936633 (PI Eduardo Miranda, Stanford) NSF Award CMS 0402490 for shared use access of nees@buffalo Collaborators Eduardo Miranda, Helmut Krawinkler, Stanford University Dimitrios Lignos, McGill University Ricardo Medina, University of New Hampshire
 NSF Award CMS for shared use access of Collaborators Eduardo Miranda, Helmut Krawinkler, Stanford University Dimitrios Lignos, McGill University Ricardo Medina, University of New Hampshire")
34
Thank You! Questions?

Similar presentations








 Using Hybrid Simulation and Cyclic Testing SELIM GÜNAY, POSTDOCTORAL.>")












