Download presentation
Presentation is loading. Please wait.

1
Control Engineering 05/09/2006Control SystemsLecture # 1

2
Feedback Control of Dynamic Systems. 4 th Edition By : Gene F. Franklin, J.David Powell, Abbas Emami - Naeini

3
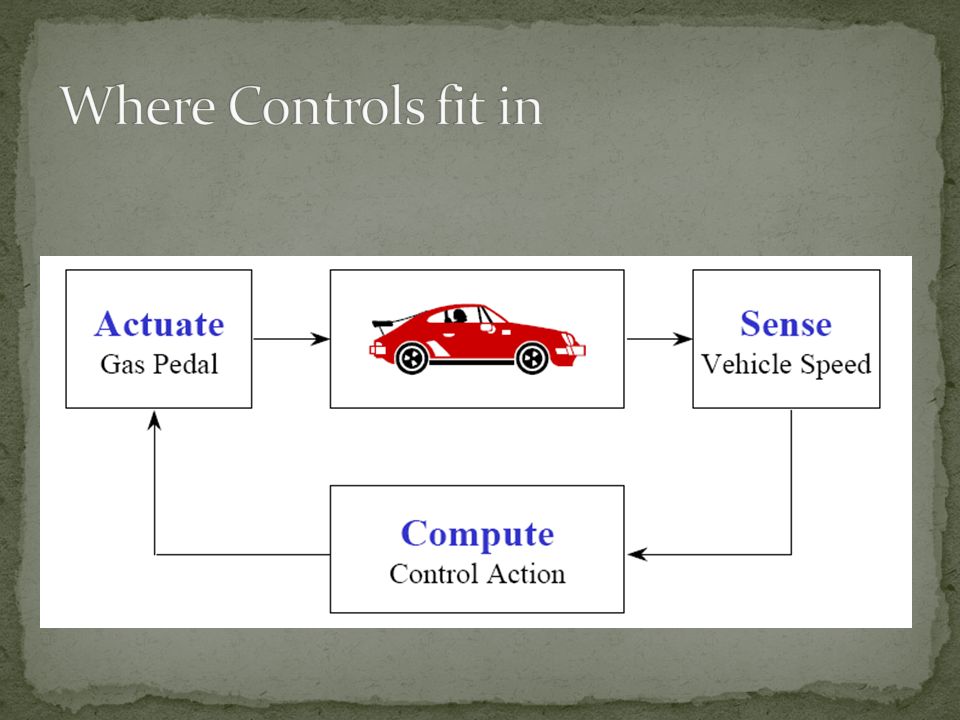
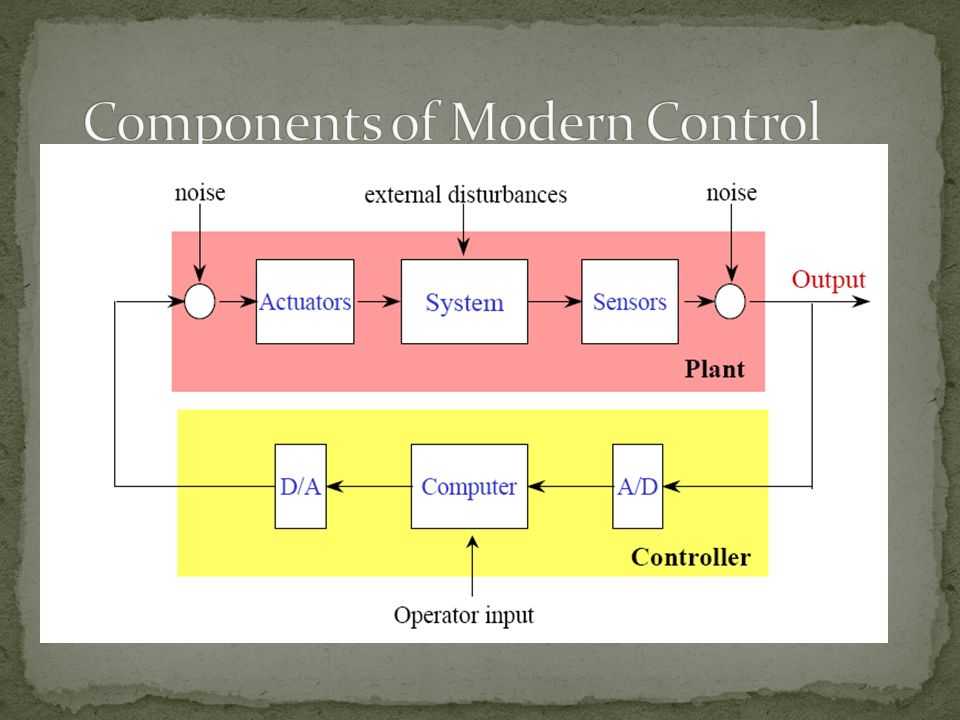
What is Control Systems? Applications Implementations Salient Design Steps Chapter 1

5
Can you manage this turn with eyes closed? Turning involves : Direction adjustment Speed adjustment A human driver does it easily. What if a computer has to do it?

6
The objective of a controller is to modify the behavior of a given system so that it works in accordance with our wishes. Control Systems is the science of designing such controllers. One of the most complicated and theoretical branch of Electrical Engineering.

7
Definition of Controls revolve around Systems. What is a system? Identify systems in this room Air-conditioners Bracket fans Amplifiers Humans Power Supply of a PC

10
Aircrafts, Missiles Automotives Nuclear Reactors, Industrial Processes Robots Human Systems

13
Modern day controller Piece of Software Housed in a PC Hosted in an Embedded Processor Real Time (Fast Processing) is the key
 is the key")
14
Design involves Mathematical Modeling of the System Model Verification Controller Design Controller Software Development Controller Testing on Simulation Controller Testing on Actual System Commissioning

15
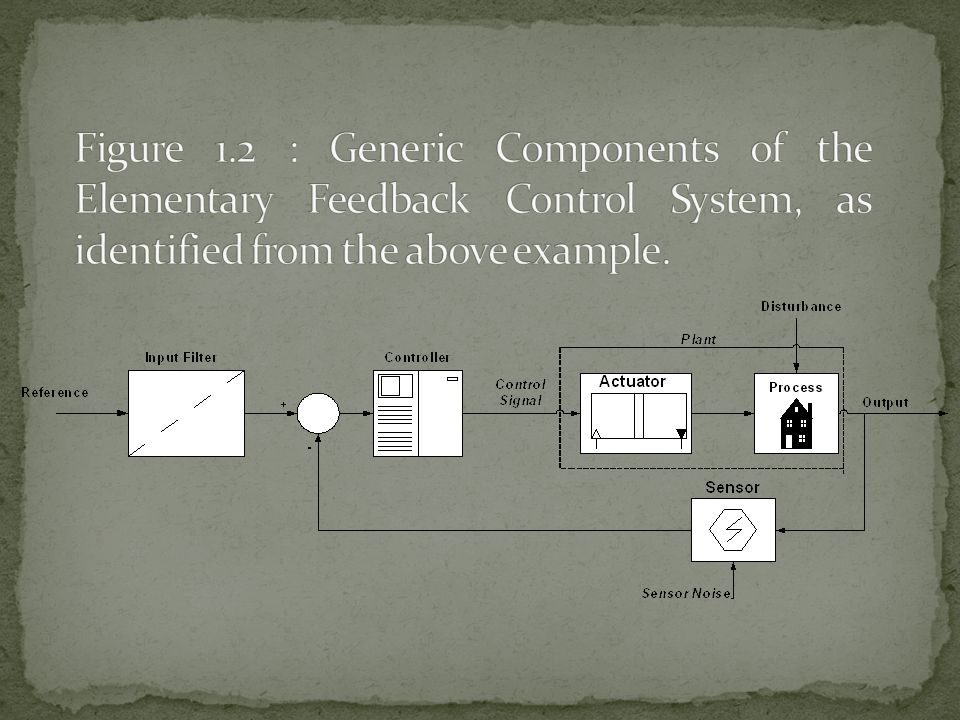
An Overview and Brief History of Feedback Control.

16
Manual and Automatic Control. Regulators. Tracking or Servo systems. Open Loop Control. Feedback Control. Processes described by LTI Equations. Feed Forward.

17
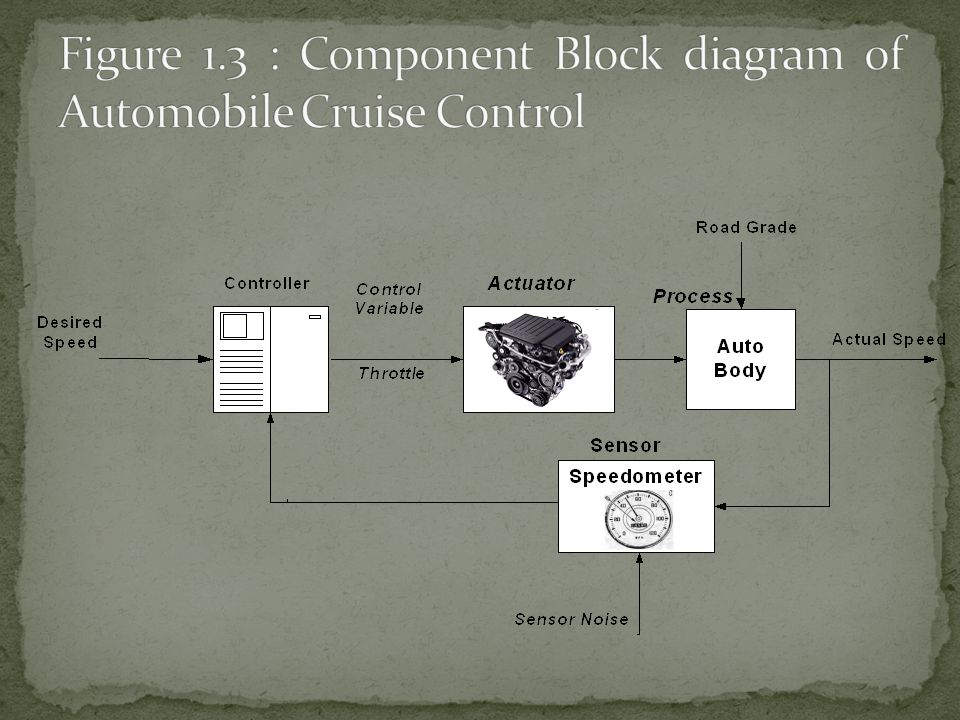
Component Block Diagram of a Room Temperature Control System

20
The value of feedback can be readily demonstrated by quantitative analysis of a simplified model of a familiar system, the cruise control of an automobile.

23
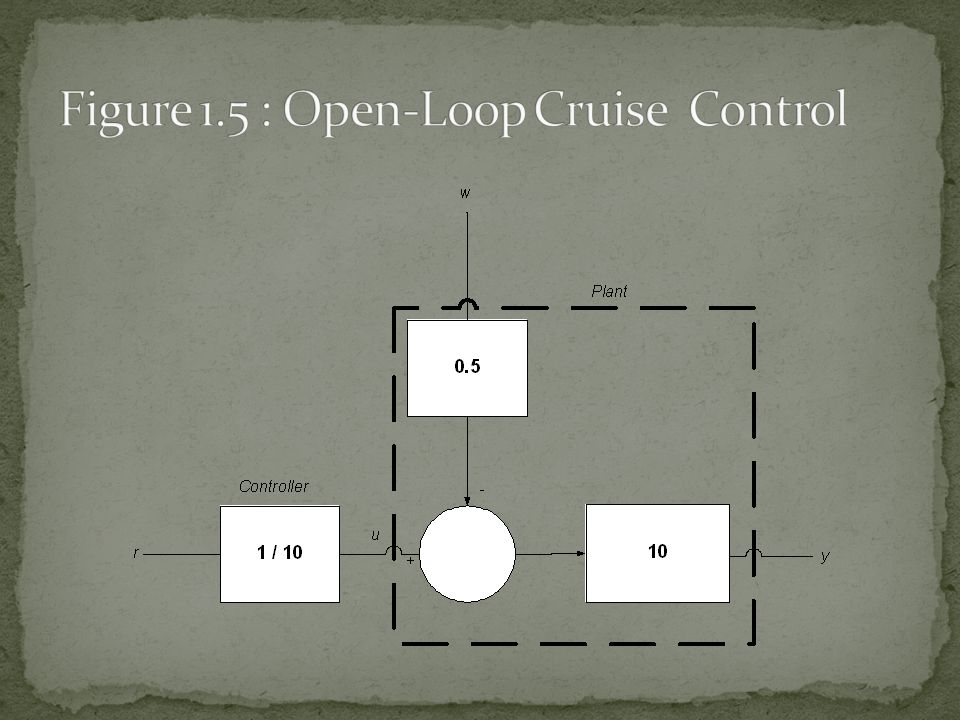
Example of an Open-Loop Control System. Controller does not use the speedometer readings.

25
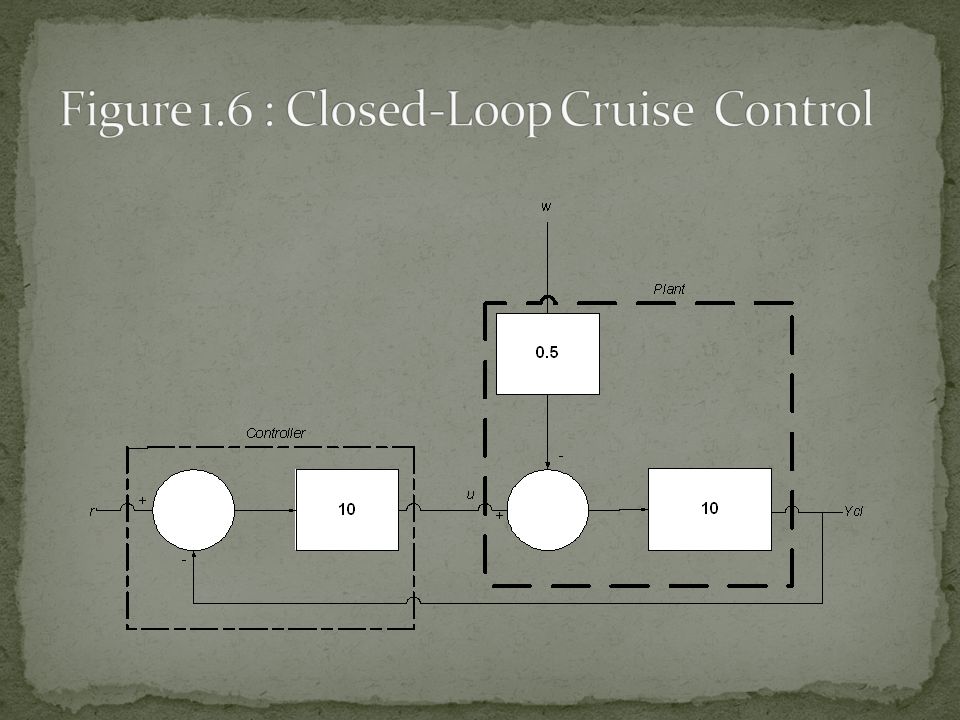
Example of a Closed-Loop Control System. Feedback scheme is shown in fig 1.6, where the controller gain has been set to 10. Feedback reduces the sensitivity of the speed error.

27
Earliest two examples: Control of flow rate to regulate a water clock. Control of liquid level in wine vessel. Liquid Level Control: Invented in antiquity and still used today (e.g. water tank of the ordinary flush toilet) is the float valve.
 is the float valve..")
28
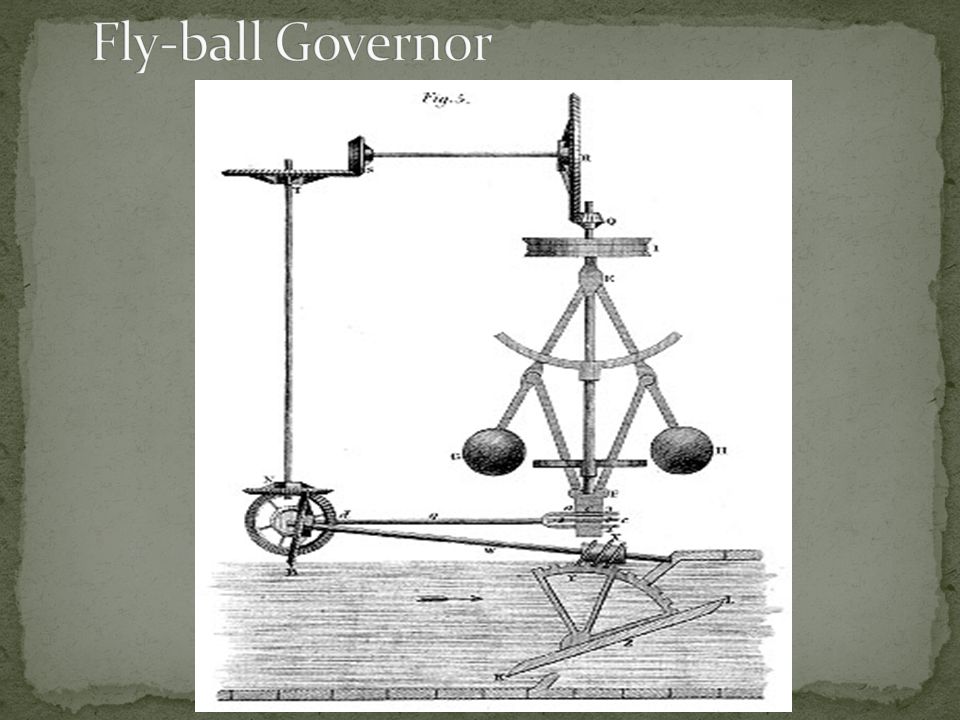
Drebbels’s Incubator: Designed in 1620, to control the temperature of a furnace, used to heat an incubator. (Refer to Fig 1.7) Fly-ball Governor: Motivated by the desire to automatically control the speed of the grinding stone in a wind driven flour mill, Fuller (1976) used a conical pendulum, or Fly-ball governor, to measure the speed of the mill. James Watt: However it was adaption of these principles to the steam engine in the laboratories of James Watt that made Fly-ball Governor famous.
 Fly-ball Governor: Motivated by the desire to automatically control the speed of the grinding stone in a wind driven flour mill, Fuller (1976) used a conical pendulum, or Fly-ball governor, to measure the speed of the mill. James Watt: However it was adaption of these principles to the steam engine in the laboratories of James Watt that made Fly-ball Governor famous..")
31
Airy (1840) was concerned with speed control. Using the centrifugal-pendulum governor, he discovered that it was capable of unstable motion. Stability Analysis: In a paper written by Maxwell, he stated that stability depends on the roots of a certain equation having negative real parts.

32
Frequency Response: To solve the problem of reducing distortion, BLACK proposed the feedback amplifier. PID Control: This field, characterized by processes that are not only highly complex but also nonlinear and subject to relatively long time delays between actuator and sensor, developed Potentional Integral- Derivative Control. Root Locus: This method is suitable for designing, as well as for stability analysis.

33
State-Variable Design: Much of this work was stimulated by the new field of control of artificial earth satellites, in which the ODE is a natural form for writing the model. Classical Control: It uses the Laplace or Fourier transforms. Modern Control: It is based on ODEs in state form and were introduced into the field starting in the 1960s.

Similar presentations







 - Introduction.>")















