Download presentation
Presentation is loading. Please wait.

1
Differential Equations MTH 242 Lecture # 16 Dr. Manshoor Ahmed

2
Summary(Recall) Application of Higher order differential equations. Hook’s Law. Newton’s second law of motion. Mass-Spring system. Derivation of equation of motion for simple harmonic motion. Solution of equation of motion alternative form of the solution. Solution of some problems.

3
Damped Motion : In the previous lecture, it was assumed that no retarding forces acting on the moving mass (i.e. free harmonic motion ). However, No retarding forces acting on the moving body is unrealistic. There always exists at least a resisting force due to surrounding medium. For example a mass can be suspended in a viscous medium. Hence, the damping forces need to be included in a realistic analysis.
. However, No retarding forces acting on the moving body is unrealistic. There always exists at least a resisting force due to surrounding medium. For example a mass can be suspended in a viscous medium. Hence, the damping forces need to be included in a realistic analysis..")
7
Solution of the equation of motion Consider the equation of free damped motion Then the auxiliary equation is Quadratic formula gives the following roots Depending upon the sign of the quantity, we can now distinguish three possible cases of the roots of the auxiliary equation.

8
Case-I: Real and distinct roots If and then the system is said to be over- damped. The solution of the equation of free damped motion is or.. This equation represents smooth and non oscillatory motion.

9
Case-II: Real and equal roots If then and the system is said to be critically damped, because any slight decrease in the damping force would result in oscillatory motion. The general solution of the equation of free damped motion is or

10
Case-III: Complex roots If then and the system is said to be under- damped. We are required to rewrite the roots of the aux. eq. The solution of the equation of free damped motion is. This represents an oscillatory motion; but amplitude of vibration as because of the coefficients Remark: Each of the three solutions contain the damping factor the displacements of the mass become negligible for larger times.

12
Some important points: 1.The coefficient is called the damped amplitude of vibrations. 2. The time interval between two successive maxima of is called quasi period, and is given by the number 3. The reciprocal of the above is called the quasi frequency. 4.The graph of the solution crosses positive t-axis i.e. the line x=0, at that time are given by where

13
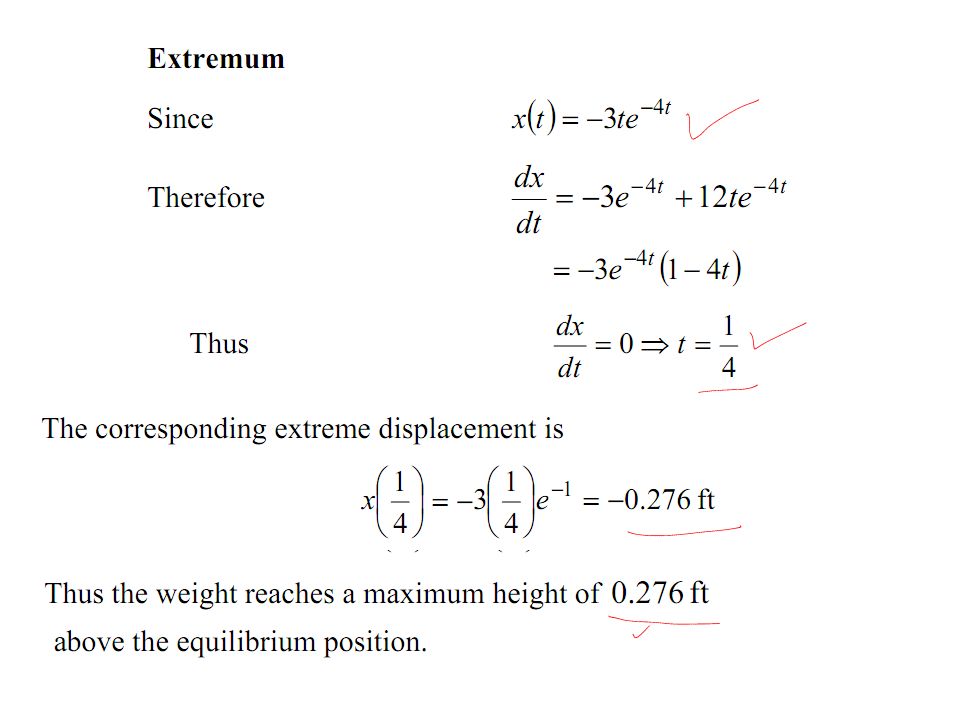
Problem 1: Find extreme values of the solution and check whether the graph crosses the equilibrium position. Interpretation:

14
Therefore, the problem represents the over-damped motion of a mass on a spring. Inspection of the boundary conditions reveals that the mass starts 1 unit below the equilibrium position with a downward velocity of 1 ft/sec.

15
Solution:

19
Problem 2: An 8-lb weight stretches a spring 2ft. Assuming that a damping force numerically equals to two times the instantaneous velocity acts on the system. Determine the equation of motion if the weight is released from the equilibrium position with an upward velocity of 3 ft / sec. Solution:

20
Thus, the differential equation of motion of the free damped motion is given by Since the mass is released from equilibrium position with an upward velocity 3 ft/sec. Therefore the initial conditions are:

21
Thus we need to solve the initial value problem Hence the system is critically damped and the solution of the governing DE is

24
Problem 3: Solution:

27
Exercises for practice

30
By the Newton’s second law of motion, we have The last equation is a non-homogeneous differential equation governing the forced motion with damping. To solve this equation, we use either the method of undetermined coefficients or the variation of parameters.

31
Problem 1: Interpretation:

32
Solution Associated homogeneous eq. Aux. eq. Therefore We use method of undetermined coefficients to find particular integral, so, let

34
Summary Applications Higher order differential equations. Damped motion, Damping force. Derivation of equation of motion. Solution of equation of motion ant alternative form of the solution. Solution of some problems. Forced damped motion. Derivation of the equation.

Similar presentations


















 represents the population of rabbits.>")





>")



 Simple Harmonic Motion (SHM)>")
 Prof. Phillips April 7, 2003.>")
 may be defined as an equation involving one or more derivatives of an.>")

