Download presentation
Presentation is loading. Please wait.

1
By Sridhar Godavarthy

2
Co-Author: Joshua Candamo Ph.D Advisors: Dr. Kasturi Rangachar Dr. Dmitry Goldgof

3
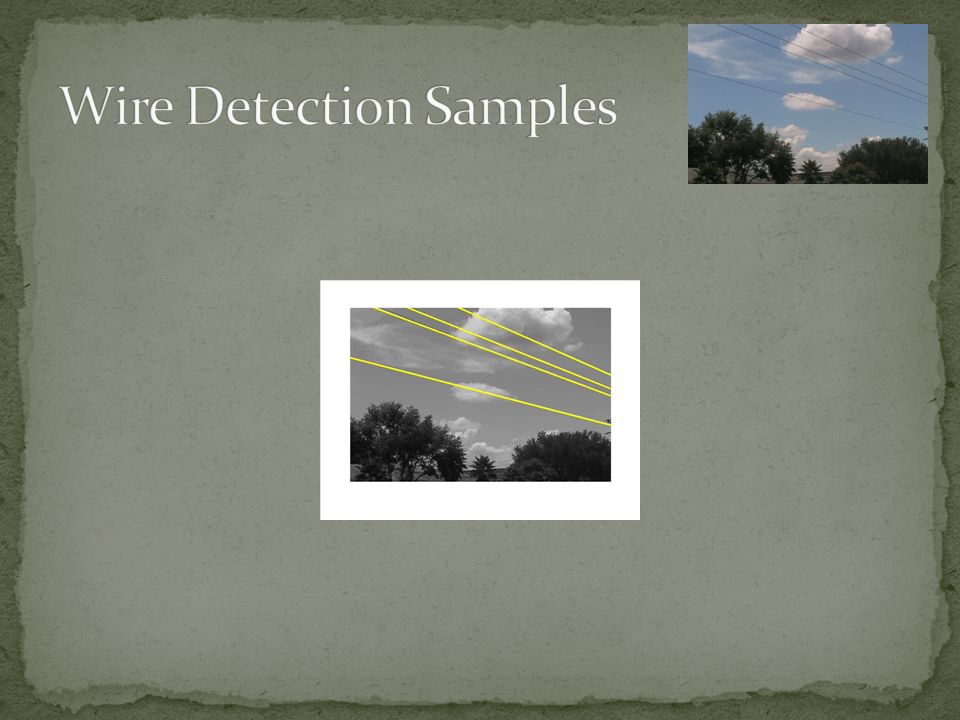
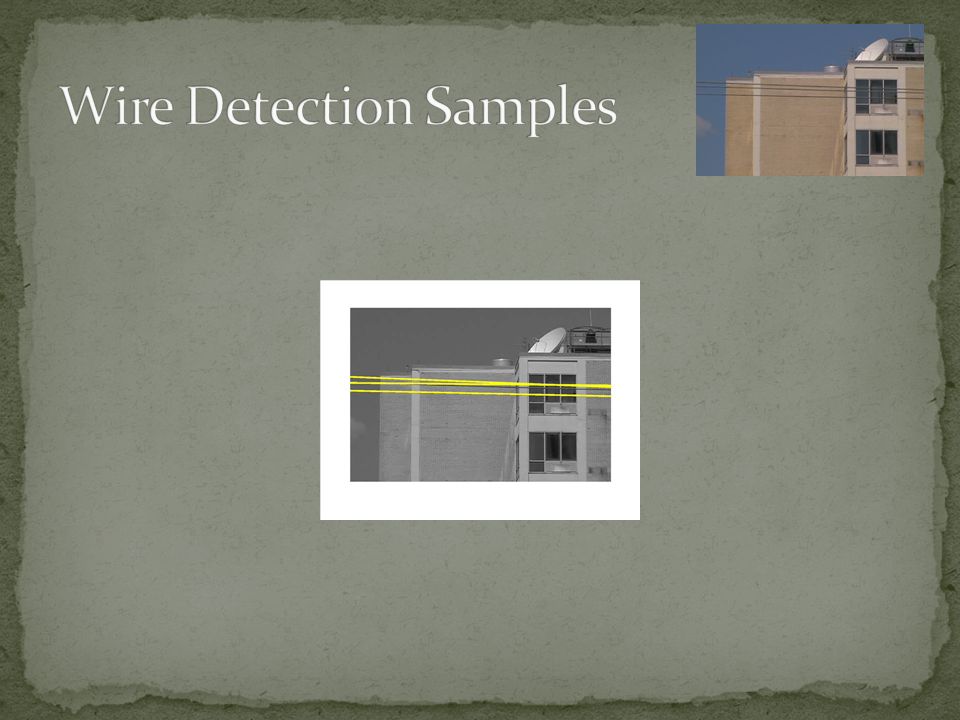
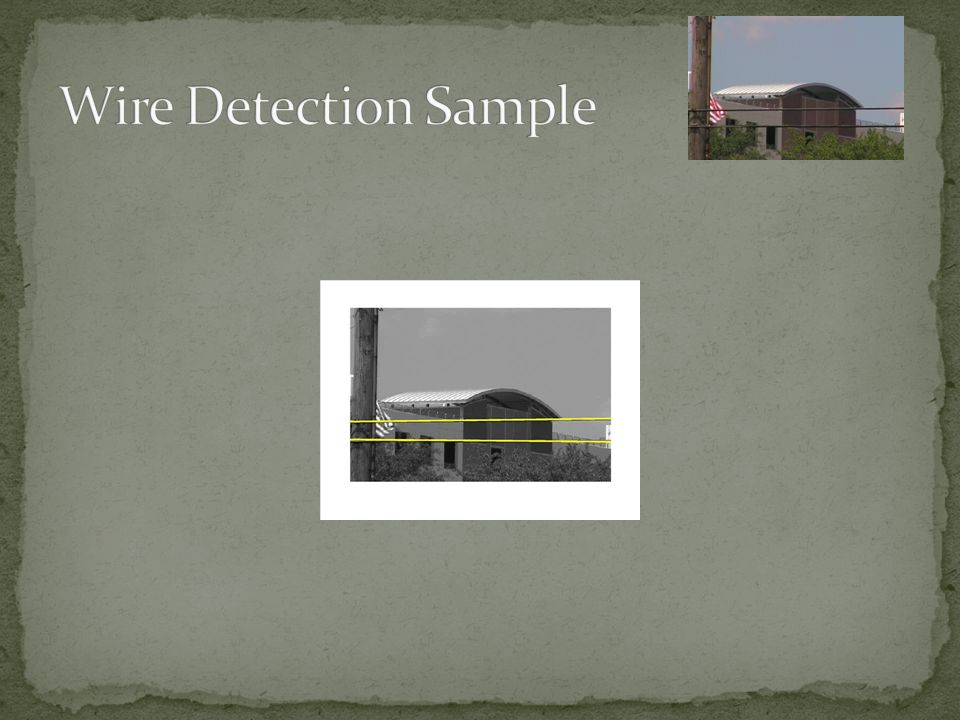
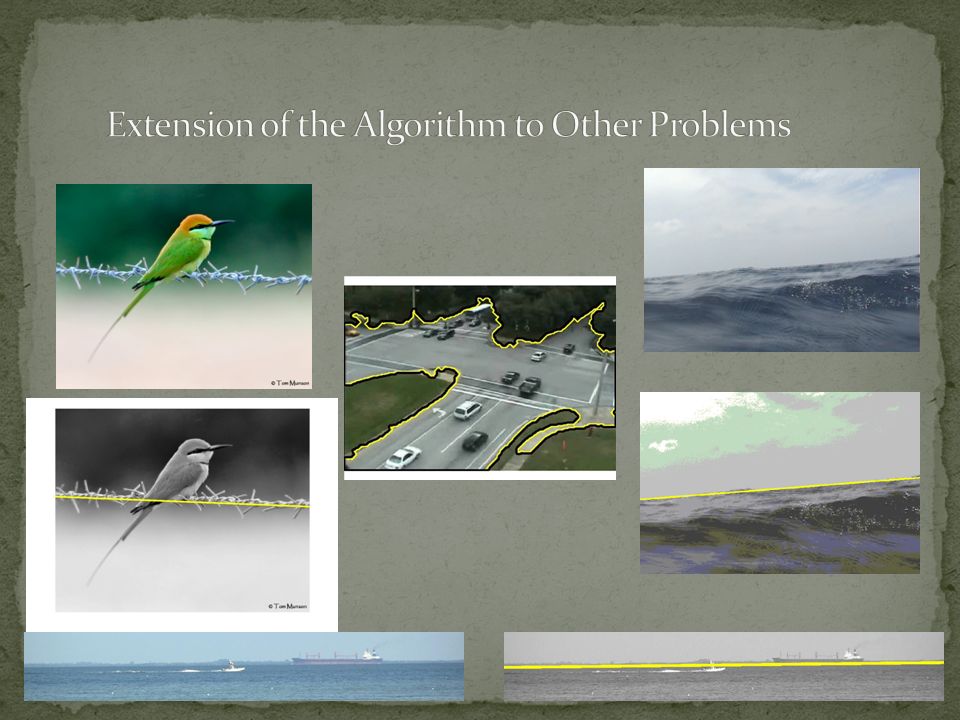
Motivation Problem Definition Previous Work Baseline The Algorithm The Profile Model The performance metric Results Samples and Other Applications - “A picture is worth a thousand words"

4
The United States army reports that they have lost more helicopters to power lines than against enemies in combat [*] [*] P. Avizonis and B. Barron, “Low cost wire detection system” Digital Avionics Systems Conference, vol. 1, pp. 3.C.3-1-3.C.3-4, 1999.
![The United States army reports that they have lost more helicopters to power lines than against enemies in combat [*] [*] P.](http://images.slideplayer.com/32/9841822/slides/slide_4.jpg "Avizonis and B. Barron, Low cost wire detection system Digital Avionics Systems Conference, vol. 1, pp. 3.C C.3-4,")
5
In image processing applications, objects are typically represented without accounting for information from their surroundings. A novel approach to represent the profile of objects using Gaussian models is presented. The profile is a representation of the object and its surrounding regions. The profile model is empirically shown to be effective and easily applicable to several object detection tasks.

6
Synthetically generated images [*] High altitude [*] R. Kasturi, O. Camps, Y. Huang, A. Narasimhamurthy, and N. Pande, “Wire Detection Algorithms for Navigation,” NASA Technical Report, 2002. Videos with real wires Low altitude urban scenes
![Synthetically generated images [*] High altitude [*] R.](http://images.slideplayer.com/32/9841822/slides/slide_6.jpg "Kasturi, O. Camps, Y. Huang, A. Narasimhamurthy, and N. Pande, Wire Detection Algorithms for Navigation, NASA Technical Report, Videos with real wires Low altitude urban scenes.")
7
Image Boundary-based Feature Map Detected Objects Pattern Matching Post-Processing Previous Algorithm Example Hough Transform

8
Support Vector Machine (SVM): Found to be not suitable for thin wires Difficult to provide a good set of positive and negative examples “Future research should explore 1) integration over time of the obtained results to detect very thin wires and 2) use image context” Gandhi, T., Yang, M.T., Kasturi, R., Camps, O., Coraor, L., McCandless, J. “Performance Characterization of the Dynamic Programming Obstacle Detection Algorithm”, IEEE Trans. on Image Processing, vol. 15, no. 5, pp. 1202-1214, 2006. Gandhi, T., Yang M. T., Kasturi, R., Camps, O., Coraor, L., McCandless, J., “Detection of obstacles in the flight path of an aircraft” IEEE Trans. Aerospace and Electronic Systems, vol. 39, no. 1, pp. 176–191, 2003.

9
[*] J. Candamo and D. Goldgof, "Wire Detection in Low-Altitude, Urban, and Low-Quality Video Frames," International Conference Pattern Recognition, pp. 1-4, 2008. [**] J. Candamo, R. Kasturi, D. Goldgof, and S. Sarkar, "Detection of thin lines using low quality video from low altitude aircraft in urban settings," IEEE Transactions on Aerospace and Electronic Systems, vol. 45, no. 2, 2009. Baseline [**]
![[*] J. Candamo and D.](http://images.slideplayer.com/32/9841822/slides/slide_9.jpg "Goldgof, Wire Detection in Low-Altitude, Urban, and Low-Quality Video Frames, International Conference Pattern Recognition, pp. 1-4, [**] J. Candamo, R. Kasturi, D. Goldgof, and S. Sarkar, Detection of thin lines using low quality video from low altitude aircraft in urban settings, IEEE Transactions on Aerospace and Electronic Systems, vol. 45, no. 2, Baseline [**].")
10
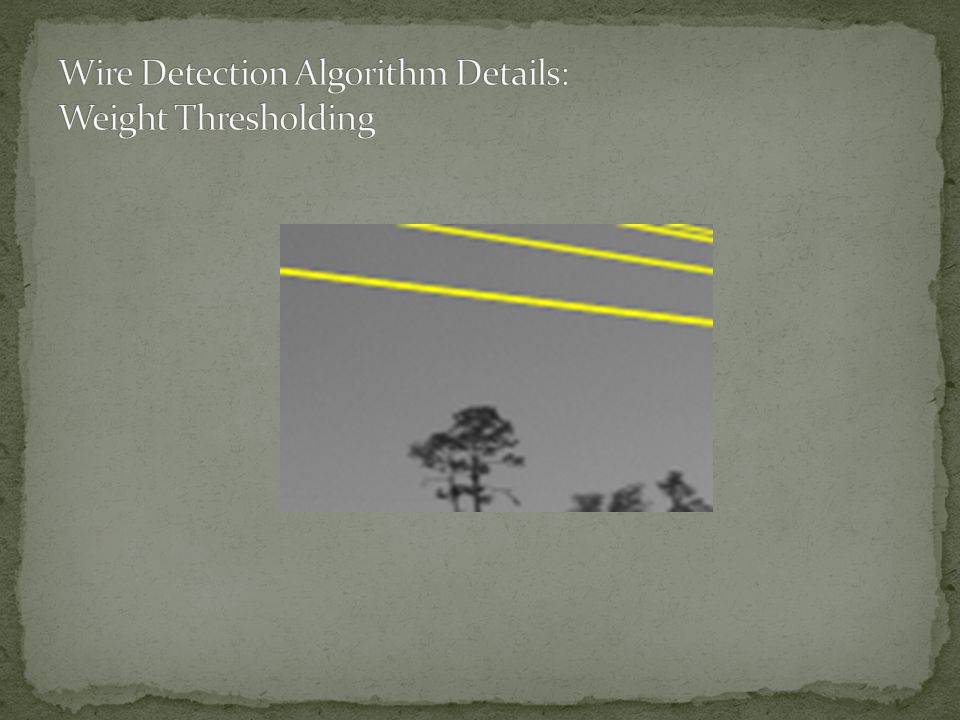
Video Frames Edge Detection Noise Reduction Line Fitting Profile Analysis Initial Wire Estimates Weight Thresholding Scene Correction Final Wires Support Pixels

11
Video Frames Edge Detection Noise Reduction Line Fitting Profile Analysis Initial Wire Estimates Weight Thresholding Scene Correction Final Wires Support Pixels

12
Each connected component in the feature map is represented using a chain code. Compute the chain code histogram: Only the pixels labeled with the code with the highest count in the histogram are kept. 0 001 1 7 1 7 1

13
Video Frames Edge Detection Noise Reduction Line Fitting Profile Analysis Initial Wire Estimates Weight Thresholding Scene Correction Final Wires Support Pixels

14
Straight lines: Fitting is done through regression, minimizing the squared error: A 4% fit improvement, leads to 15% ROC performance detection increase

15
Video Frames Edge Detection Noise Reduction Line Fitting Profile Analysis Initial Wire Estimates Weight Thresholding Scene Correction Final Wires Support Pixels

16
Thin Objects Wire Surrounding Regions Object Profile

17
Looking for Symmetrical Profiles

18
Video Frames Edge Detection Noise Reduction Line Fitting Profile Analysis Initial Wire Estimates Weight Thresholding Scene Correction Final Wires Support Pixels

20
Let the set of all wire candidates that “survived” the weight thresholding be S. where m i is the slope of the wire candidate, m S is the set of slopes corresponding to S, and θ is the angle deviation required for a wire to be considered correctly detected.

21
Image Boundary-based Feature Map Detected Objects Pattern Matching Profile Estimation Initial Detected Objects Pre-Processing Post-Processing Wire Detection Example

22
within an angle of 10 0 and y-intercept within 20 pixels of the ground truth Reasonable. Based on psychological studies of human perception

23
[*] J. Candamo and D. Goldgof, "Wire Detection in Low-Altitude, Urban, and Low-Quality Video Frames," International Conference Pattern Recognition, pp. 1-4, 2008. [**] J. Candamo, R. Kasturi, D. Goldgof, and S. Sarkar, "Detection of thin lines using low quality video from low altitude aircraft in urban settings," IEEE Transactions on Aerospace and Electronic Systems, vol. 45, no. 2, 2009. Final Algorithm Preliminary Algorithm [*] Baseline [**] Final Algorithm Preliminary Algorithm [*] Baseline [**]
![[*] J. Candamo and D.](http://images.slideplayer.com/32/9841822/slides/slide_23.jpg "Goldgof, Wire Detection in Low-Altitude, Urban, and Low-Quality Video Frames, International Conference Pattern Recognition, pp. 1-4, [**] J. Candamo, R. Kasturi, D. Goldgof, and S. Sarkar, Detection of thin lines using low quality video from low altitude aircraft in urban settings, IEEE Transactions on Aerospace and Electronic Systems, vol. 45, no. 2, Final Algorithm Preliminary Algorithm [*] Baseline [**] Final Algorithm Preliminary Algorithm [*] Baseline [**].")
24
No Tracking Low quality video Handles cluttered background Specifically designed for low altitude flight Robust

29
Visual Complexity Choppy Wires

30
Merci beaucoup pour votre patience Sridhar Godavarthy sgodavar @ cse.usf.edu www.cse.usf.edu/~sgodavar Questions?

32
Found Videos are videos downloaded from the Internet UAV: Unmanned Aerial Vehicles Total Training 592 pixel blobs from 16 traffic images Found Videos40 videos UAV Videos15 minutes of video

33
Definition not concise 2 lines are equal if: Weak feature map led to high FA rate HT is a weak pattern recognition method in reality: trigonometric operations are slow, and only robust to noise if you have low clutter Line i=(ρ i, θ i ) Line j=(ρ j, θ j )
 Line j=(ρ j, θ j )")
34
Within the application domain: 2 image wires i & j are equivalent if they can be used interchangeably to describe the same true wire i & j are similar if they are likely to be perceived as equal by a human operator We define equivalency of wires as And line similarity as PAR_SIM_m = 0.2 (about 10 o ) PAR_SIM_c = 20px
 PAR_SIM_c = 20px")
35
Wires Lines Morphological Filtering Lines Threshold Canny Connected Component Labeling Combine Similar Lines Image Line Fitting Support Points Global Line Direction Similarity Steger’s Line Profile Low Level Image Understanding Strong Feature Map (No Training) High Level Image Understanding (Training) Kasturi’s Threshold: Base= control variable for ROC
 High Level Image Understanding (Training) Kasturi’s Threshold: Base= control variable for ROC")
36
Primitive mean Compute distance d to i th Gaussian Use pixels along No Update i th Gaussian No If Initialize a th Gaussian No, i.e. 1 st iteration ThenComplete iterations for G 3

37
No Wire Candidate i Initial Weight (pixels) Weight Thresholding Sum Scene Correction Are all Wire Candidates Done? Next candidate Feature Map Original Edge Map Using t = -1 0 1 Yes Support Pixels

38
“Most wire pixels are edge pixels” “Most of edge pixels are not wire pixels” Domain Definitions/Assumptions: A wire i is described by the 3-tuple weight, slope, and y-intercept The weight is the # of pixels conforming the wire PAR_SIM_m = 0.2 (about 10 o ) PAR_SIM_c = 20px
 PAR_SIM_c = 20px")
Similar presentations

:747-757, Aug 2000.>")







: edge detection>")



 Junlan Yang University of Illinois,Chicago.>")






