Download presentation
Presentation is loading. Please wait.

1
Multi-Objective Optimization for Topology Control in Hybrid FSO/RF Networks Jaime Llorca December 8, 2004

2
Outline Hybrid FSO/RF Networks Topology Control Problem Statement Optimal solution Constraint method Weighting method Heuristics Comparison versus optimal Conclusions

3
Hybrid FSO/RF Networks Wireless directional links FSO: high capacity, low reliability RF: lower capacity, higher reliability Cost Matrix 0 58 30 38 31 27 60 58 0 27 42 35 33 30 30 27 0 13 27 2 33 38 42 13 0 33 10 25 31 35 27 33 0 22 43 27 33 2 10 22 0 42 60 30 33 25 43 42 0

4
Topology Control Dynamic networks Atmospheric obscuration Nodes mobility Topology Control Dynamic topology reconfiguration in order to optimize performance

5
Problem Statement Dynamically select the best possible topology Objectives: Maximize total capacity Minimize total power expenditure Constraints 2 transceivers per node Bi-connectivity Ring Topologies

6
Link Parameters Capacity (C) FSO and RF: C = 1.1 Gbps RF: C = 100 Mbps Power expenditure (P) FSO and RF: P = (P TX ) FSO + (P TX ) RF RF: P = (P TX ) RF
 FSO and RF: C = 1.1 Gbps RF: C = 100 Mbps Power expenditure (P) FSO and RF: P = (P TX ) FSO + (P TX ) RF RF: P = (P TX ) RF")
7
Formulation Objectives: Constraints: Bi-connectivity Degree constraints Sub-tour constraints

8
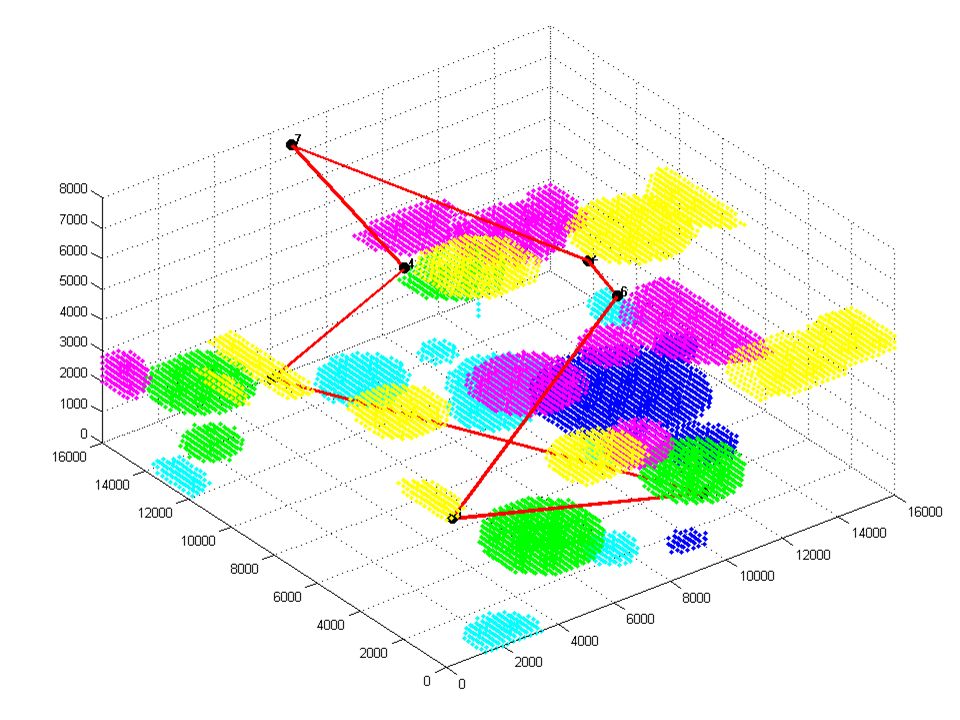
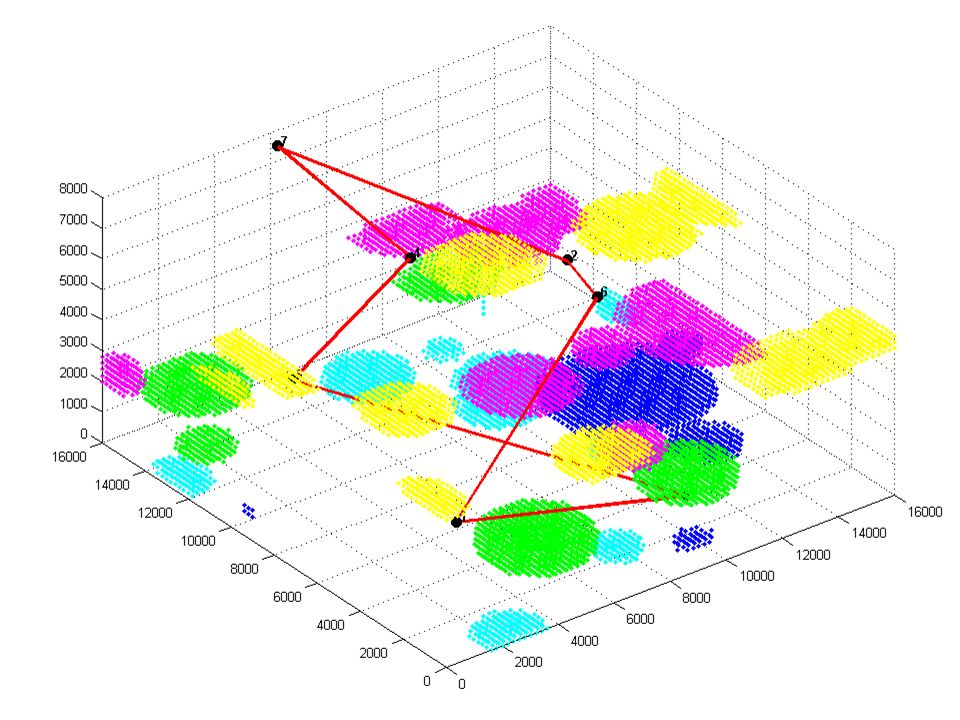
Optimal Solution Integer Programming problem No Convexity! Analogous to the traveling salesman problem NP-Complete! Solvable in reasonable time for small number of nodes Case of study: 7 node network Simulation time: 45 min 10 snapshots (every 5 minutes starting at 0)
.")
15
Constraint Method Constrain power expenditure: Start with a high enough value of ε and keep reducing it to get the P.O set of solutions. Weakly Pareto Optimality guaranteed Pareto Optimality when a unique solution exists for a given ε

16
Weighting method Keep varying w from 0 to 1 to find the P.O set of solutions Weakly Pareto Optimality guaranteed P.O. when weights strictly positive May miss P.O. as well as W.P.O points due to lack of convexity

17
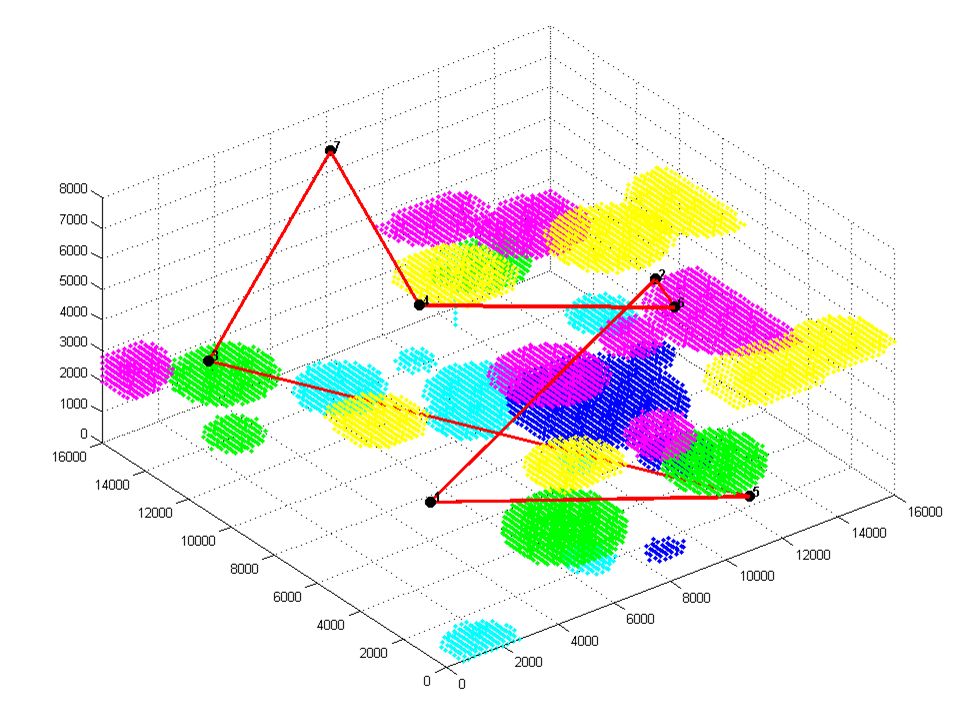
T = 0 min

18
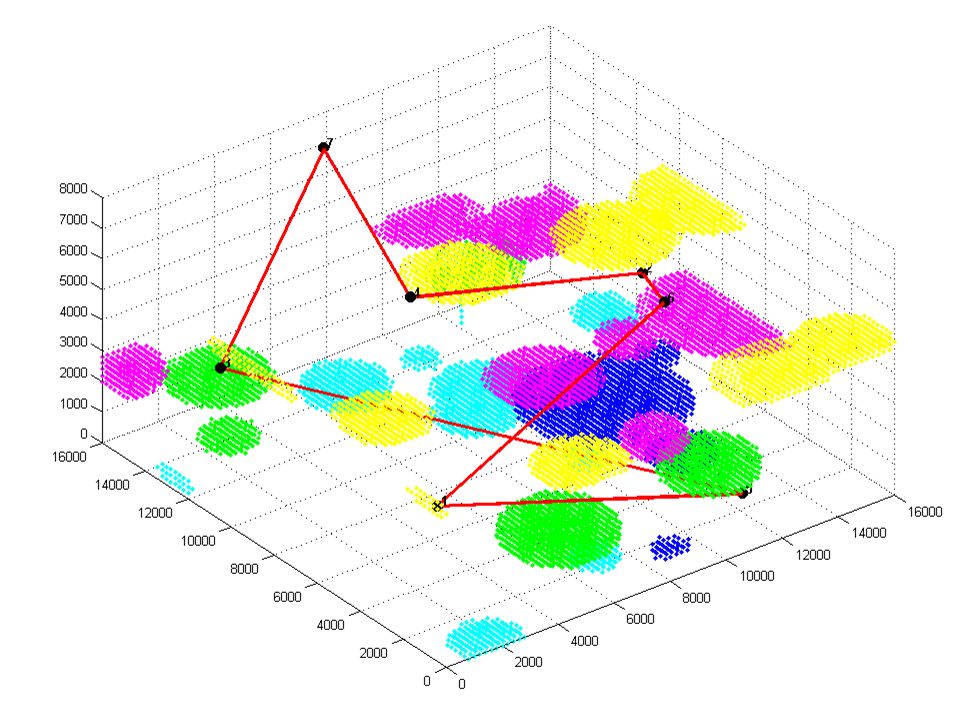
T = 10 min

19
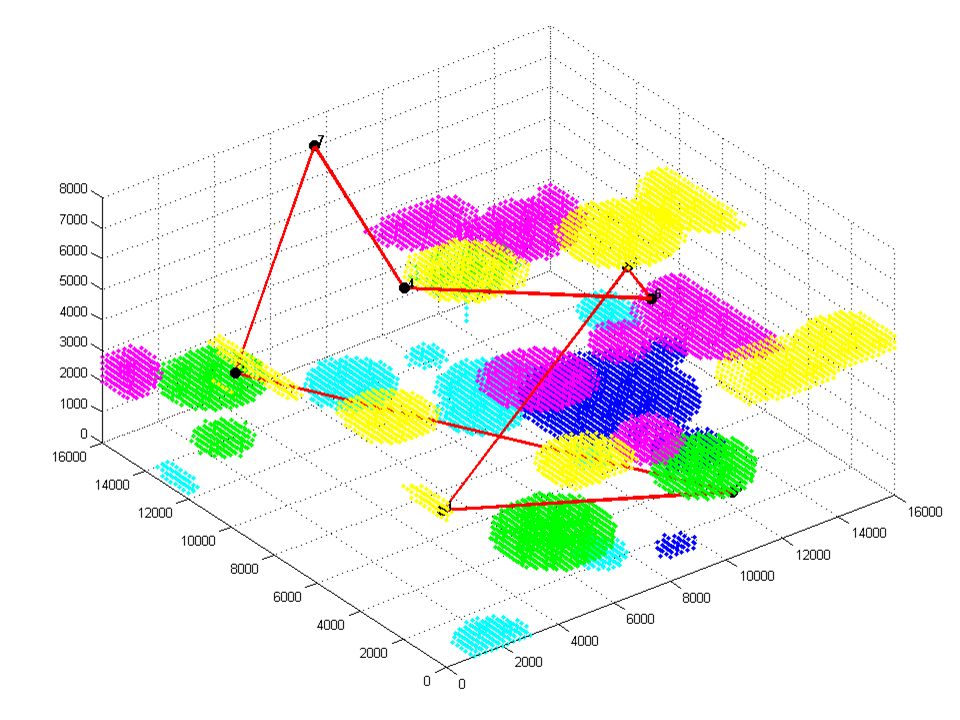
T = 20 min

20
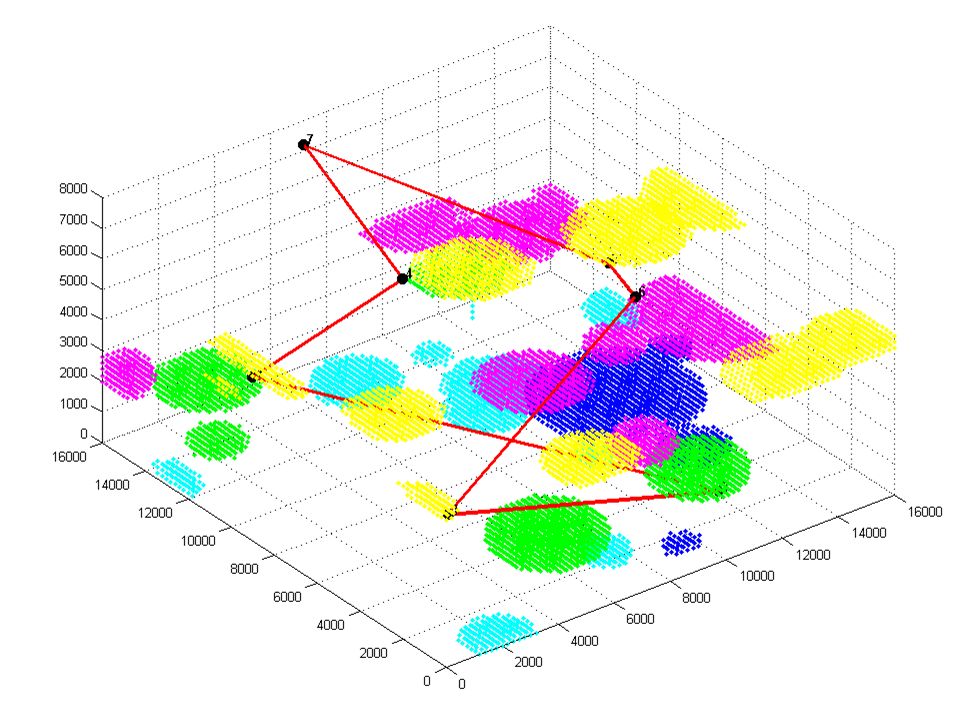
T = 30 min

21
T = 40 min

22
Heuristics Approximation algorithms to solve the problem in polynomial time Spanning Ring Adds edges in increasing order of cost hoping to minimize total cost. Branch Exchange Starts with an arbitrary topology and iteratively exchanges link pairs to decrease total cost. A combination of both used

23
Multi-objective Heuristics methodology is based on individual link costs What should the cost be? Weighted link cost Try for different values of k and see how the solution moves in the objective space related to the P.O set

24
T = 20 min, k = 0

25
T = 20 min, k = 0.2

26
T = 20 min, k = 0.4

27
T = 20 min, k = 0.6

28
T = 20 min, k = 0.8

29
T = 20 min, k = 1

30
T = 40 min, k = 1

31
Conclusions Computational complexity of optimal solution increases exponentially with the number of nodes Not feasible in dynamic environments Heuristics needed to obtain close-to-optimal solutions in polynomial time. Useful to obtain the P.O set of solutions offline, in order to analyze the performance of our heuristics

Similar presentations


 Fall 2003 CSE, POSTECH.>")


 Zhang Xun Shi.>")







 Lili Qiu, Kamal Jain and Mohammad Mahdian (Microsoft.>")


: Try to create multi-hop path. Link Selection: Local Optimization: Select.>")


