Download presentation
Presentation is loading. Please wait.

1
CS 325 Computer Graphics 04 / 30 / 2010 Instructor: Michael Eckmann

2
Michael Eckmann - Skidmore College - CS 325 - Spring 2010 Today’s Topics Questions? Polygonal meshes Piecewise Cubic Parametric curves –General description and concept –Hermite –Bezier –Spline

3
Michael Eckmann - Skidmore College - CS325 - Spring 2010 Polygonal Meshes A collection of edges, vertices and polygons –which are connected –and where each edge is shared by at most 2 polygons (example on board) –each vertex is shared by at least 2 edges When polygonal meshes are created interactively –care must be taken to make sure that the above constraints are fulfilled. Different ways to store a polygonal mesh have consequences on –space (to store the mesh data) –and time (to operate on the polygonal mesh)
 –and time (to operate on the polygonal mesh).")
4
Michael Eckmann - Skidmore College - CS325 - Spring 2010 Polygonal Meshes Some operations that are common on polygonal meshes –find all edges containing a particular vertex –find all the polygons sharing a particular edge or vertex –find the two vertices for an edge –find all the edges of a polygon –determining if all the conditions of a polygonal mesh are met How the polygonal mesh is represented has consequences on the speed of those operations and on how much space is needed to store a polygonal mesh.

5
Michael Eckmann - Skidmore College - CS325 - Spring 2010 Polygonal Meshes Representation schemes: –represent each polygon as a list of vertices in order around the polygon edges exist between each pair of successive vertices as well as between the last and the first efficient in space for a single polygon inefficient in space for a polygonal mesh, why? interactively working on a polygonal mesh represented this way would be time consuming (e.g. move a vertex --- need to find all the polygons that contain it and move it...) etc. –store all the vertices in a list, and represent a polygon as an ordered list of pointers into the vertex list. more efficient in space for a polygonal mesh move a vertex --- moves it for all polygons that contain it still hard to find all polygons that share an edge
 etc. –store all the vertices in a list, and represent a polygon as an ordered list of pointers into the vertex list. more efficient in space for a polygonal mesh move a vertex --- moves it for all polygons that contain it still hard to find all polygons that share an edge.")
6
Michael Eckmann - Skidmore College - CS325 - Spring 2010 Polygonal Meshes Representation schemes: –store all the vertices in a list, and all the edges in an edge list* and represent a polygon as an ordered list of pointers into the edge list * edge list contains pointers to two vertices and pointers to one or two polygons can easily find all polys that share an edge now In all 3 representation schemes just described it is still not easy to find all the edges containing a particular vertex –in the description of a vertex, could add pointers to all the edges

7
Michael Eckmann - Skidmore College - CS325 - Spring 2010 Curves Some motivations for having mathematical equations define curves and surfaces (see section 8-8 Spline Representations in our text). 1) polylines and polygons are 1 st degree piecewise linear approximations to curves and surfaces (they are approximations unless they are the exact description of the outline or shape) –if they are approximations, then it takes large numbers of points to describe them for more accurate representations == BAD –if interactively building these surfaces (or edges/outlines) then the more points, the more tedious it is to build We want to be able to get more accurate representations of curved surfaces (or edges/outlines) than polygons or polylines give us AND we want to be able to represent them with less points. This will benefit us by having less storage and being able to be built interactively more easily.
 polylines and polygons are 1 st degree piecewise linear approximations to curves and surfaces (they are approximations unless they are the exact description of the outline or shape) –if they are approximations, then it takes large numbers of points to describe them for more accurate representations == BAD –if interactively building these surfaces (or edges/outlines) then the more points, the more tedious it is to build We want to be able to get more accurate representations of curved surfaces (or edges/outlines) than polygons or polylines give us AND we want to be able to represent them with less points. This will benefit us by having less storage and being able to be built interactively more easily..")
8
Michael Eckmann - Skidmore College - CS325 - Spring 2010 Curves These smooth curves are also used in graphics for other purposes like describing a motion path for an animation sequence.

9
Michael Eckmann - Skidmore College - CS325 - Spring 2010 Curves Let's consider 2d dimensional curves which can be later generalized to 3d surfaces. Instead of using piecewise linear functions, we use piecewise smooth curves. These are of a higher degree than linear functions. We have several choices –a) we can use functions like y = f(x) problem that for each value of x there is one and only one y value –can't represent circles/ellipses etc. problem that you can't represent vertical lines and is problematic to represent curves with a tangent/slope of infinity –b) we can use implicit equations like f(x,y) = 0 (e.g. a circle of radius 1 like: x 2 + y 2 – 1 = 0) may have more solutions than we want --- e.g. to model half a circle you'd need constraints on the values of x or y or both. joining 2 implicitly defined curves is hard to make the tangents at the join point agree (why might we want that? -- example on board)
 we can use functions like y = f(x) problem that for each value of x there is one and only one y value –can t represent circles/ellipses etc. problem that you can t represent vertical lines and is problematic to represent curves with a tangent/slope of infinity –b) we can use implicit equations like f(x,y) = 0 (e.g. a circle of radius 1 like: x 2 + y 2 – 1 = 0) may have more solutions than we want --- e.g. to model half a circle you d need constraints on the values of x or y or both. joining 2 implicitly defined curves is hard to make the tangents at the join point agree (why might we want that. -- example on board).")
10
Michael Eckmann - Skidmore College - CS325 - Spring 2010 Curves We have several choices –c) we can use parametric equations of the curve x = f(t) and y = g(t) –where f(t) and g(t) are typically cubic polynomials the problems of the other 2 choices are solved as we shall see –we typically use cubic polynomials because 1) quadratic or linear polynomials do not allow a curve segment to be described with 2 endpoints and specific slopes at the 2 endpoints (examples on the board) 2) higher degree (than 3) polynomials are more compute intensive and allow (possibly) unwanted artefacts in the curve A cubic polynomial to define a finite curve segment has 4 coefficients per parametric equation x(t) = a x t 3 + b x t 2 + c x t + d x y(t) = a y t 3 + b y t 2 + c y t + d y z(t) = a z t 3 + b z t 2 + c z t + d z where 0 <= t <= 1
 we can use parametric equations of the curve x = f(t) and y = g(t) –where f(t) and g(t) are typically cubic polynomials the problems of the other 2 choices are solved as we shall see –we typically use cubic polynomials because 1) quadratic or linear polynomials do not allow a curve segment to be described with 2 endpoints and specific slopes at the 2 endpoints (examples on the board) 2) higher degree (than 3) polynomials are more compute intensive and allow (possibly) unwanted artefacts in the curve A cubic polynomial to define a finite curve segment has 4 coefficients per parametric equation x(t) = a x t 3 + b x t 2 + c x t + d x y(t) = a y t 3 + b y t 2 + c y t + d y z(t) = a z t 3 + b z t 2 + c z t + d z where 0 <= t <= 1")
11
Michael Eckmann - Skidmore College - CS325 - Spring 2010 Curves x(t) = a x t 3 + b x t 2 + c x t + d x y(t) = a y t 3 + b y t 2 + c y t + d y z(t) = a z t 3 + b z t 2 + c z t + d z where 0 <= t <= 1 can be written in matrix form as: Q(t) = [x(t) y(t) z(t)] = T C where T = [t 3 t 2 t 1] and [a x a y a z ] C = [b x b y b z ] [c x c y c z ] [d x d y d z ]
![Michael Eckmann - Skidmore College - CS325 - Spring 2010 Curves x(t) = a x t 3 + b x t 2 + c x t + d x y(t) = a y t 3 + b y t 2 + c y t + d y z(t) = a z t 3 + b z t 2 + c z t + d z where 0 <= t <= 1 can be written in matrix form as: Q(t) = [x(t) y(t) z(t)] = T C where T = [t 3 t 2 t 1] and [a x a y a z ] C = [b x b y b z ] [c x c y c z ] [d x d y d z ]](http://images.slideplayer.com/30/9548132/slides/slide_11.jpg "Michael Eckmann - Skidmore College - CS325 - Spring 2010 Curves x(t) = a x t 3 + b x t 2 + c x t + d x y(t) = a y t 3 + b y t 2 + c y t + d y z(t) = a z t 3 + b z t 2 + c z t + d z where 0 <= t <= 1 can be written in matrix form as: Q(t) = [x(t) y(t) z(t)] = T C where T = [t 3 t 2 t 1] and [a x a y a z ] C = [b x b y b z ] [c x c y c z ] [d x d y d z ]")
12
Michael Eckmann - Skidmore College - CS325 - Spring 2010 Curves We specify these curves by a set of control points. Polynomial sections can be fit together so that all the control points are connected which is called interpolated. Polynomial sections can be fit together so that some or none of the control points are connected which is called approximated. Examples of these on the next two slides.

15
Michael Eckmann - Skidmore College - CS325 - Spring 2010 Curves Continuity - when joining two curve segments together (piecewise curves). There are several different kinds of continuity to consider Geometric continuity –G 0 geometric continuity = the curve segments are joined together –G 1 geometric continuity = the curve segments are joined together and the directions of tangent vectors are equal at the point where they are joined Parametric continuity –C 0 parametric continuity = same as G 0 geometric continuity –C 1 parametric continuity = the curve segments are joined together and the directions AND magnitudes of tangent vectors are equal at the point where they are joined –C k parametric continuity = the curve segments are joined together and the directions AND magnitudes of all the derivatives up to the k th are equal at the point where they are joined (that is, the 1 st through k th derivatives exist and are continuous themselves)
.")
16
Michael Eckmann - Skidmore College - CS325 - Spring 2010 Curves Let me draw on the board some example joined curve segments and point out their continuity. See page 422 in text.

17
Michael Eckmann - Skidmore College - CS325 - Spring 2010 Curves There are several families of cubic polynomial curve segments that are determined by different things –Hermite determined by the 2 endpoints and the tangent vector at each of the 2 endpoints –Bezier determined by the 2 endpoints P 1 & P 4 and 2 other intermediate points P 2 & P 3 not on the curve –the tangent vectors at the end points are the vectors P 1 P 2 and P 3 P 4 –which are [P 2 – P 1 ] and [P 4 – P 3 ] –Spline determined by 4 specific points Note: there can be higher degree polynomials of these families of curves (see a few slides ahead for a 4 th degree polynomial Bezier curve segment)
![Michael Eckmann - Skidmore College - CS325 - Spring 2010 Curves There are several families of cubic polynomial curve segments that are determined by different things –Hermite determined by the 2 endpoints and the tangent vector at each of the 2 endpoints –Bezier determined by the 2 endpoints P 1 & P 4 and 2 other intermediate points P 2 & P 3 not on the curve –the tangent vectors at the end points are the vectors P 1 P 2 and P 3 P 4 –which are [P 2 – P 1 ] and [P 4 – P 3 ] –Spline determined by 4 specific points Note: there can be higher degree polynomials of these families of curves (see a few slides ahead for a 4 th degree polynomial Bezier curve segment)](http://images.slideplayer.com/30/9548132/slides/slide_17.jpg "Michael Eckmann - Skidmore College - CS325 - Spring 2010 Curves There are several families of cubic polynomial curve segments that are determined by different things –Hermite determined by the 2 endpoints and the tangent vector at each of the 2 endpoints –Bezier determined by the 2 endpoints P 1 & P 4 and 2 other intermediate points P 2 & P 3 not on the curve –the tangent vectors at the end points are the vectors P 1 P 2 and P 3 P 4 –which are [P 2 – P 1 ] and [P 4 – P 3 ] –Spline determined by 4 specific points Note: there can be higher degree polynomials of these families of curves (see a few slides ahead for a 4 th degree polynomial Bezier curve segment)")
18
Bezier Curve segment examples

19
more Bezier Curve segment examples

20
Michael Eckmann - Skidmore College - CS 376 - Spring 2007 Recall x(t) = a x t 3 + b x t 2 + c x t + d x y(t) = a y t 3 + b y t 2 + c y t + d y z(t) = a z t 3 + b z t 2 + c z t + d z where 0 <= t <= 1 can be written in matrix form as: Q(t) = [x(t) y(t) z(t)] = T C where T = [t 3 t 2 t 1] and [a x a y a z ] C = [b x b y b z ] [c x c y c z ] [d x d y d z ]
![Michael Eckmann - Skidmore College - CS Spring 2007 Recall x(t) = a x t 3 + b x t 2 + c x t + d x y(t) = a y t 3 + b y t 2 + c y t + d y z(t) = a z t 3 + b z t 2 + c z t + d z where 0 <= t <= 1 can be written in matrix form as: Q(t) = [x(t) y(t) z(t)] = T C where T = [t 3 t 2 t 1] and [a x a y a z ] C = [b x b y b z ] [c x c y c z ] [d x d y d z ]](http://images.slideplayer.com/30/9548132/slides/slide_20.jpg "Michael Eckmann - Skidmore College - CS Spring 2007 Recall x(t) = a x t 3 + b x t 2 + c x t + d x y(t) = a y t 3 + b y t 2 + c y t + d y z(t) = a z t 3 + b z t 2 + c z t + d z where 0 <= t <= 1 can be written in matrix form as: Q(t) = [x(t) y(t) z(t)] = T C where T = [t 3 t 2 t 1] and [a x a y a z ] C = [b x b y b z ] [c x c y c z ] [d x d y d z ]")
21
Michael Eckmann - Skidmore College - CS 376 - Spring 2007 Basis Matrix and Geometry Matrix Q(t) = [x(t) y(t) z(t)] = T C where T = [t 3 t 2 t 1] and [a x a y a z ] C = [b x b y b z ] [c x c y c z ] [d x d y d z ] can be rewritten so that C = M G where –M is a 4x4 matrix called the Basis Matrix and –G is a 4x1 column vector called the Geometry Matrix so Q(t) = T M G
![Michael Eckmann - Skidmore College - CS Spring 2007 Basis Matrix and Geometry Matrix Q(t) = [x(t) y(t) z(t)] = T C where T = [t 3 t 2 t 1] and [a x a y a z ] C = [b x b y b z ] [c x c y c z ] [d x d y d z ] can be rewritten so that C = M G where –M is a 4x4 matrix called the Basis Matrix and –G is a 4x1 column vector called the Geometry Matrix so Q(t) = T M G](http://images.slideplayer.com/30/9548132/slides/slide_21.jpg "Michael Eckmann - Skidmore College - CS Spring 2007 Basis Matrix and Geometry Matrix Q(t) = [x(t) y(t) z(t)] = T C where T = [t 3 t 2 t 1] and [a x a y a z ] C = [b x b y b z ] [c x c y c z ] [d x d y d z ] can be rewritten so that C = M G where –M is a 4x4 matrix called the Basis Matrix and –G is a 4x1 column vector called the Geometry Matrix so Q(t) = T M G")
22
Michael Eckmann - Skidmore College - CS 376 - Spring 2007 Basis Matrix and Geometry Matrix Q(t) = [x(t) y(t) z(t)] = T M G where T = [t 3 t 2 t 1] and [m 11 m 12 m 13 m 14 ] M = [m 21 m 22 m 23 m 24 ] [m 31 m 32 m 33 m 34 ] [m 41 m 42 m 43 m 44 ] [G 1 ] G = [G 2 ] [G 3 ] [G 4 ] Note: the values of G i are the conditions that define the curve --- such as endpoints and tangent vectors at those end points
![Michael Eckmann - Skidmore College - CS Spring 2007 Basis Matrix and Geometry Matrix Q(t) = [x(t) y(t) z(t)] = T M G where T = [t 3 t 2 t 1] and [m 11 m 12 m 13 m 14 ] M = [m 21 m 22 m 23 m 24 ] [m 31 m 32 m 33 m 34 ] [m 41 m 42 m 43 m 44 ] [G 1 ] G = [G 2 ] [G 3 ] [G 4 ] Note: the values of G i are the conditions that define the curve --- such as endpoints and tangent vectors at those end points](http://images.slideplayer.com/30/9548132/slides/slide_22.jpg "Michael Eckmann - Skidmore College - CS Spring 2007 Basis Matrix and Geometry Matrix Q(t) = [x(t) y(t) z(t)] = T M G where T = [t 3 t 2 t 1] and [m 11 m 12 m 13 m 14 ] M = [m 21 m 22 m 23 m 24 ] [m 31 m 32 m 33 m 34 ] [m 41 m 42 m 43 m 44 ] [G 1 ] G = [G 2 ] [G 3 ] [G 4 ] Note: the values of G i are the conditions that define the curve --- such as endpoints and tangent vectors at those end points")
23
Michael Eckmann - Skidmore College - CS 376 - Spring 2007 Blending functions look at x(t) x(t) = (t 3 m 11 + t 2 m 21 + t m 31 + m 41 )g 1x + (t 3 m 12 + t 2 m 22 + t m 32 + m 42 )g 2x + (t 3 m 13 + t 2 m 23 + t m 33 + m 43 )g 3x + (t 3 m 14 + t 2 m 24 + t m 34 + m 44 )g 4x where g 1x is the x coordinate of G 1 similar equations for y(t) and z(t) the curve is a weighted sum of the elements of the Geometry Matrix where the weights are cubic polynomials of t which are called the Blending Functions the Blending Functions B are given by B = T M, since Q(t) = T M G, Q(t) = B G
 x(t) = (t 3 m 11 + t 2 m 21 + t m 31 + m 41 )g 1x + (t 3 m 12 + t 2 m 22 + t m 32 + m 42 )g 2x + (t 3 m 13 + t 2 m 23 + t m 33 + m 43 )g 3x + (t 3 m 14 + t 2 m 24 + t m 34 + m 44 )g 4x where g 1x is the x coordinate of G 1 similar equations for y(t) and z(t) the curve is a weighted sum of the elements of the Geometry Matrix where the weights are cubic polynomials of t which are called the Blending Functions the Blending Functions B are given by B = T M, since Q(t) = T M G, Q(t) = B G")
24
Michael Eckmann - Skidmore College - CS 376 - Spring 2007 Example with lines Before going through an example to find the blending functions from a set of geometry information for parametric cubic polynomials, let's first see how the procedure works with determining the blending functions of a parametric line.

25
Michael Eckmann - Skidmore College - CS 376 - Spring 2007 Example with lines Recall the parametric equation of a line: x(t) = x 0 + t ( x end – x 0 ) y(t) = y 0 + t ( y end – y 0 ) z(t) = z 0 + t ( z end – z 0 ) what are the endpoints of the line segment described above? can be rewritten as: x(t) = a x t + b x y(t) = a y t + b y y(t) = a z t + b z
 = a x t + b x y(t) = a y t + b y y(t) = a z t + b z.")
26
Michael Eckmann - Skidmore College - CS 376 - Spring 2007 x(t) = a x t + b x y(t) = a y t + b y y(t) = a z t + b z To get this in the form of Q(t) = T C = T M G T = [ t 1 ] and C = [ a x a y a z ] [ b x b y b z ] C = M G where M = [ m 11 m 12 ] and G = [ g 1x g 1y g 1z ] [ m 21 m 22 ] [ g 2x g 2y g 2z ] Example with lines
![Michael Eckmann - Skidmore College - CS Spring 2007 x(t) = a x t + b x y(t) = a y t + b y y(t) = a z t + b z To get this in the form of Q(t) = T C = T M G T = [ t 1 ] and C = [ a x a y a z ] [ b x b y b z ] C = M G where M = [ m 11 m 12 ] and G = [ g 1x g 1y g 1z ] [ m 21 m 22 ] [ g 2x g 2y g 2z ] Example with lines](http://images.slideplayer.com/30/9548132/slides/slide_26.jpg "Michael Eckmann - Skidmore College - CS Spring 2007 x(t) = a x t + b x y(t) = a y t + b y y(t) = a z t + b z To get this in the form of Q(t) = T C = T M G T = [ t 1 ] and C = [ a x a y a z ] [ b x b y b z ] C = M G where M = [ m 11 m 12 ] and G = [ g 1x g 1y g 1z ] [ m 21 m 22 ] [ g 2x g 2y g 2z ] Example with lines")
27
Michael Eckmann - Skidmore College - CS 376 - Spring 2007 The geometry matrix is simply the two endpoints G = [ G 1 ] = [ g 1x g 1y g 1z ] = [ x 0 y 0 z 0 ] = [ P 0 ] [ G 2 ] [ g 2x g 2y g 2z ] [ x end y end z end ] [ P 1 ] we need to find out the Basis Matrix M M = [ m 11 m 12 ] [ m 21 m 22 ] Q(t) = T M G = [ t 1 ] M G Let's do the rest on the board to figure out M Example with lines
![Michael Eckmann - Skidmore College - CS Spring 2007 The geometry matrix is simply the two endpoints G = [ G 1 ] = [ g 1x g 1y g 1z ] = [ x 0 y 0 z 0 ] = [ P 0 ] [ G 2 ] [ g 2x g 2y g 2z ] [ x end y end z end ] [ P 1 ] we need to find out the Basis Matrix M M = [ m 11 m 12 ] [ m 21 m 22 ] Q(t) = T M G = [ t 1 ] M G Let s do the rest on the board to figure out M Example with lines](http://images.slideplayer.com/30/9548132/slides/slide_27.jpg "Michael Eckmann - Skidmore College - CS Spring 2007 The geometry matrix is simply the two endpoints G = [ G 1 ] = [ g 1x g 1y g 1z ] = [ x 0 y 0 z 0 ] = [ P 0 ] [ G 2 ] [ g 2x g 2y g 2z ] [ x end y end z end ] [ P 1 ] we need to find out the Basis Matrix M M = [ m 11 m 12 ] [ m 21 m 22 ] Q(t) = T M G = [ t 1 ] M G Let s do the rest on the board to figure out M Example with lines")
28
Michael Eckmann - Skidmore College - CS 376 - Spring 2007 Q(t) = [ t 1 ] M G when t=0, Q(0) is the first endpoint G 1 when t=1, Q(1) is the first endpoint G 2 Q(0) = G 1 = [ 0 1 ] M G and Q(1) = G 2 = [ 1 1 ] M G [ G 1 ] = [ 0 1 ] M [ G 1 ] [ G 2 ] [ 1 1 ] [ G 2 ] Therefore, [ 0 1 ] M = I (the identity matrix) [ 1 1 ] So, to get M, take the inverse of [ 0 1 ] [ 1 1 ] Example with lines
![Michael Eckmann - Skidmore College - CS Spring 2007 Q(t) = [ t 1 ] M G when t=0, Q(0) is the first endpoint G 1 when t=1, Q(1) is the first endpoint G 2 Q(0) = G 1 = [ 0 1 ] M G and Q(1) = G 2 = [ 1 1 ] M G [ G 1 ] = [ 0 1 ] M [ G 1 ] [ G 2 ] [ 1 1 ] [ G 2 ] Therefore, [ 0 1 ] M = I (the identity matrix) [ 1 1 ] So, to get M, take the inverse of [ 0 1 ] [ 1 1 ] Example with lines](http://images.slideplayer.com/30/9548132/slides/slide_28.jpg "Michael Eckmann - Skidmore College - CS Spring 2007 Q(t) = [ t 1 ] M G when t=0, Q(0) is the first endpoint G 1 when t=1, Q(1) is the first endpoint G 2 Q(0) = G 1 = [ 0 1 ] M G and Q(1) = G 2 = [ 1 1 ] M G [ G 1 ] = [ 0 1 ] M [ G 1 ] [ G 2 ] [ 1 1 ] [ G 2 ] Therefore, [ 0 1 ] M = I (the identity matrix) [ 1 1 ] So, to get M, take the inverse of [ 0 1 ] [ 1 1 ] Example with lines")
29
Michael Eckmann - Skidmore College - CS 376 - Spring 2007 So, to get M, take the inverse of [ 0 1 ] [ 1 1 ] The inverse of a 2x2 invertible matrix A = [ a 11 a 12 ] = [ a 21 a 22 ] 1 [ a 22 -a 12 ] ---------------- [ -a 21 a 11 ] a 11 a 22 - a 12 a 21 So, M = (1 / (0-1)) [1 -1] = -1 [1 -1] = [ -1 1 ] [-1 0] [-1 0] [ 1 0 ] Example with lines
![Michael Eckmann - Skidmore College - CS Spring 2007 So, to get M, take the inverse of [ 0 1 ] [ 1 1 ] The inverse of a 2x2 invertible matrix A = [ a 11 a 12 ] = [ a 21 a 22 ] 1 [ a 22 -a 12 ] [ -a 21 a 11 ] a 11 a 22 - a 12 a 21 So, M = (1 / (0-1)) [1 -1] = -1 [1 -1] = [ -1 1 ] [-1 0] [-1 0] [ 1 0 ] Example with lines](http://images.slideplayer.com/30/9548132/slides/slide_29.jpg "Michael Eckmann - Skidmore College - CS Spring 2007 So, to get M, take the inverse of [ 0 1 ] [ 1 1 ] The inverse of a 2x2 invertible matrix A = [ a 11 a 12 ] = [ a 21 a 22 ] 1 [ a 22 -a 12 ] [ -a 21 a 11 ] a 11 a 22 - a 12 a 21 So, M = (1 / (0-1)) [1 -1] = -1 [1 -1] = [ -1 1 ] [-1 0] [-1 0] [ 1 0 ] Example with lines")
30
Michael Eckmann - Skidmore College - CS 376 - Spring 2007 Q(t) = T M G = [ t 1 ] M G = [ t 1 ] [ -1 1 ] G [ 1 0 ] Recall that T M are the blending functions. What then, are the blending functions of lines? Let's plot them on the board. Example with lines
![Michael Eckmann - Skidmore College - CS Spring 2007 Q(t) = T M G = [ t 1 ] M G = [ t 1 ] [ -1 1 ] G [ 1 0 ] Recall that T M are the blending functions.](http://images.slideplayer.com/30/9548132/slides/slide_30.jpg "What then, are the blending functions of lines. Let s plot them on the board. Example with lines.")
31
Michael Eckmann - Skidmore College - CS 376 - Spring 2007 Q(t) = T C = T M G = [ t 3 t 2 t 1 ] M G M is the 4x4 Basis matrix and G is the Geometry matrix For Hermite curve segments, recall that they are defined with 2 endpoints and the tangents at those endpoints. So, the Geometry matrix is made up of the 2 endpoints and the 2 tangent vectors. The tangent vectors are determined by the derivative of the curve with respect to t at each of the end points (when t=0 and when t=1). x(t) = a x t 3 + b x t 2 + c x t + d x y(t) = a y t 3 + b y t 2 + c y t + d y z(t) = a z t 3 + b z t 2 + c z t + d z where 0 <= t <= 1 x'(t) = 3a x t 2 + 2b x t + c x y'(t) = 3a y t 2 + 2b y t + c y z'(t) = 3a z t 2 + 2b z t + c z Hermite Basis Matrix and Blending Functions
![Michael Eckmann - Skidmore College - CS Spring 2007 Q(t) = T C = T M G = [ t 3 t 2 t 1 ] M G M is the 4x4 Basis matrix and G is the Geometry matrix For Hermite curve segments, recall that they are defined with 2 endpoints and the tangents at those endpoints.](http://images.slideplayer.com/30/9548132/slides/slide_31.jpg "So, the Geometry matrix is made up of the 2 endpoints and the 2 tangent vectors. The tangent vectors are determined by the derivative of the curve with respect to t at each of the end points (when t=0 and when t=1). x(t) = a x t 3 + b x t 2 + c x t + d x y(t) = a y t 3 + b y t 2 + c y t + d y z(t) = a z t 3 + b z t 2 + c z t + d z where 0 <= t <= 1 x (t) = 3a x t 2 + 2b x t + c x y (t) = 3a y t 2 + 2b y t + c y z (t) = 3a z t 2 + 2b z t + c z Hermite Basis Matrix and Blending Functions.")
32
Michael Eckmann - Skidmore College - CS 376 - Spring 2007 x'(t) = 3a x t 2 + 2b x t + c x y'(t) = 3a y t 2 + 2b y t + c y z'(t) = 3a z t 2 + 2b z t + c z So, Q'(t) = [ 3t 2 2t 1 0 ] C agreed? Let's call the 2 endpoints in the Geometry Matrix P 1 and P 4 and the 2 tangent vectors at those 2 endpoints R 1 and R 4. [ P 1 ] G = [ P 4 ] [ R 1 ] [ R 4 ] Hermite Basis Matrix and Blending Functions
![Michael Eckmann - Skidmore College - CS Spring 2007 x (t) = 3a x t 2 + 2b x t + c x y (t) = 3a y t 2 + 2b y t + c y z (t) = 3a z t 2 + 2b z t + c z So, Q (t) = [ 3t 2 2t 1 0 ] C agreed.](http://images.slideplayer.com/30/9548132/slides/slide_32.jpg "Let s call the 2 endpoints in the Geometry Matrix P 1 and P 4 and the 2 tangent vectors at those 2 endpoints R 1 and R 4. [ P 1 ] G = [ P 4 ] [ R 1 ] [ R 4 ] Hermite Basis Matrix and Blending Functions.")
33
Michael Eckmann - Skidmore College - CS 376 - Spring 2007 Let's just work with the x coordinates (the y and z coordinates will be handled similarly) So, x(t) = a x t 3 + b x t 2 + c x t + d x = T C x = [ t 3 t 2 t 1 ] M G x and x'(t) = 3a x t 2 + 2b x t + c x = T C x = [ 3t 2 2t 1 0 ] M G x when t = 0, x(t) gets us the first endpoint and when t = 1, x(t) gets us the other endpoint. x(0) = P 1x = [ 0 0 0 1 ] M G x x(1) = P 4x = [ 1 1 1 1 ] M G x when t = 0, x'(t) gets us the tangent at the first endpoint and when t = 1, x'(t) gets us the tangent at the other endpoint. x'(0) = R 1x = [ 0 0 1 0 ] M G x x'(1) = R 4x = [ 3 2 1 0 ] M G x Hermite Basis Matrix and Blending Functions
![Michael Eckmann - Skidmore College - CS Spring 2007 Let s just work with the x coordinates (the y and z coordinates will be handled similarly) So, x(t) = a x t 3 + b x t 2 + c x t + d x = T C x = [ t 3 t 2 t 1 ] M G x and x (t) = 3a x t 2 + 2b x t + c x = T C x = [ 3t 2 2t 1 0 ] M G x when t = 0, x(t) gets us the first endpoint and when t = 1, x(t) gets us the other endpoint.](http://images.slideplayer.com/30/9548132/slides/slide_33.jpg "x(0) = P 1x = [ ] M G x x(1) = P 4x = [ ] M G x when t = 0, x (t) gets us the tangent at the first endpoint and when t = 1, x (t) gets us the tangent at the other endpoint. x (0) = R 1x = [ ] M G x x (1) = R 4x = [ ] M G x Hermite Basis Matrix and Blending Functions.")
34
Michael Eckmann - Skidmore College - CS 376 - Spring 2007 [P 1 ] [ 0 0 0 1 ] [P 4 ] = G x = [ 1 1 1 1 ] M G x [R 1 ] [ 0 0 1 0 ] [R 4 ] x [ 3 2 1 0 ] just like when we solved for M (the basis matrix) with the line equations, we do the same thing here because clearly [ 0 0 0 1 ] [ 1 1 1 1 ] M = Identity [ 0 0 1 0 ] [ 3 2 1 0 ] so, that matrix on the left is equal to M -1 Hermite Basis Matrix and Blending Functions
![Michael Eckmann - Skidmore College - CS Spring 2007 [P 1 ] [ ] [P 4 ] = G x = [ ] M G x [R 1 ] [ ] [R 4 ] x [ ] just like when we solved for M (the basis matrix) with the line equations, we do the same thing here because clearly [ ] [ ] M = Identity [ ] [ ] so, that matrix on the left is equal to M -1 Hermite Basis Matrix and Blending Functions](http://images.slideplayer.com/30/9548132/slides/slide_34.jpg "Michael Eckmann - Skidmore College - CS Spring 2007 [P 1 ] [ ] [P 4 ] = G x = [ ] M G x [R 1 ] [ ] [R 4 ] x [ ] just like when we solved for M (the basis matrix) with the line equations, we do the same thing here because clearly [ ] [ ] M = Identity [ ] [ ] so, that matrix on the left is equal to M -1 Hermite Basis Matrix and Blending Functions")
35
Michael Eckmann - Skidmore College - CS 376 - Spring 2007 There are techniques to get the inverse of a matrix which we won't go into here --- if you've had linear algebra, you should know how. The inverse of [ 0 0 0 1 ] [ 1 1 1 1 ] [ 0 0 1 0 ] [ 3 2 1 0 ] is [ 2 -2 1 1 ] [ -3 3 -2 -1 ] [ 0 0 1 0 ] [ 1 0 0 0 ] This is the Basis Matrix for Hermite curve segments. Let's verify that it is indeed the inverse of the matrix above. How? Hermite Basis Matrix and Blending Functions

36
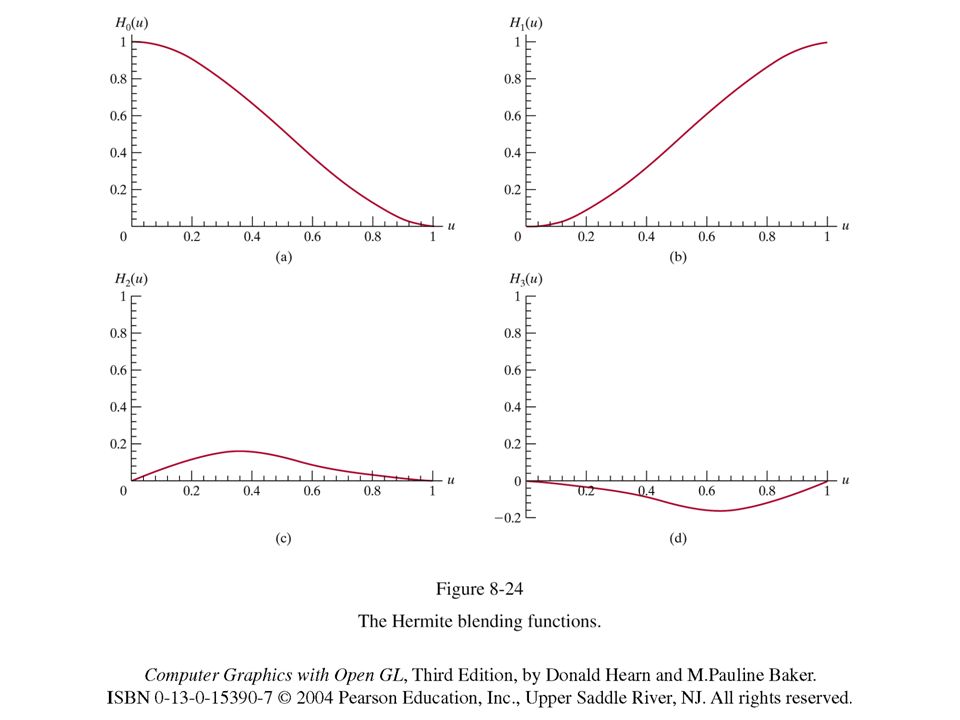
Michael Eckmann - Skidmore College - CS 376 - Spring 2007 [ 2 -2 1 1 ] T M = [ t 3 t 2 t 1 ] [ -3 3 -2 -1 ] [ 0 0 1 0 ] [ 1 0 0 0 ] The blending functions are: 2 t 3 - 3t 2 + 1 -2 t 3 + 3t 2 t 3 - 2t 2 + t t 3 - t 2 These are respectively multiplied by P 1, P 4, R 1, and R 4 and then added together to get Q(t) which is the curve Hermite Basis Matrix and Blending Functions
![Michael Eckmann - Skidmore College - CS Spring 2007 [ ] T M = [ t 3 t 2 t 1 ] [ ] [ ] [ ] The blending functions are: 2 t 3 - 3t t 3 + 3t 2 t 3 - 2t 2 + t t 3 - t 2 These are respectively multiplied by P 1, P 4, R 1, and R 4 and then added together to get Q(t) which is the curve Hermite Basis Matrix and Blending Functions](http://images.slideplayer.com/30/9548132/slides/slide_36.jpg "Michael Eckmann - Skidmore College - CS Spring 2007 [ ] T M = [ t 3 t 2 t 1 ] [ ] [ ] [ ] The blending functions are: 2 t 3 - 3t t 3 + 3t 2 t 3 - 2t 2 + t t 3 - t 2 These are respectively multiplied by P 1, P 4, R 1, and R 4 and then added together to get Q(t) which is the curve Hermite Basis Matrix and Blending Functions")
38
Michael Eckmann - Skidmore College - CS 376 - Spring 2007 [ P 1 ] G 1 = [ P 4 ] [ R 1 ] [ R 4 ] [ P 4 ] G 2 = [ P 7 ] [ kR 4 ] [ R 7 ] If two Hermite curve segments have the above geometry matrices then we can see that they join up at P 4 and that the tangent vectors at P 4 are proportional, hence giving G 1 continuity. If k=1 then C 1 continuity. Using the Geometry matrices to join curves together
![Michael Eckmann - Skidmore College - CS Spring 2007 [ P 1 ] G 1 = [ P 4 ] [ R 1 ] [ R 4 ] [ P 4 ] G 2 = [ P 7 ] [ kR 4 ] [ R 7 ] If two Hermite curve segments have the above geometry matrices then we can see that they join up at P 4 and that the tangent vectors at P 4 are proportional, hence giving G 1 continuity.](http://images.slideplayer.com/30/9548132/slides/slide_38.jpg "If k=1 then C 1 continuity. Using the Geometry matrices to join curves together.")
39
Michael Eckmann - Skidmore College - CS 376 - Spring 2007 As stated earlier, the pieces of information defining a Bezier curve are 4 points. Therefore, the Geometry Matrix are these 4 points. P 1 and P 4 are the endpoints and P 2 and P 3 are the intermediate points that do not necessarily (usually don't) live on the curve. R 1 (the tangent at the first endpoint) = 3 [P 2 – P 1 ] R 4 (the tangent at the other endpoint) = 3 [P 4 – P 3 ] [ P 1 ] G = [ P 2 ] [ P 3 ] [ P 4 ] Q(t) = [ t 3 t 2 t 1 ] M G Bezier Basis Matrix and Blending Functions
 live on the curve. R 1 (the tangent at the first endpoint) = 3 [P 2 – P 1 ] R 4 (the tangent at the other endpoint) = 3 [P 4 – P 3 ] [ P 1 ] G = [ P 2 ] [ P 3 ] [ P 4 ] Q(t) = [ t 3 t 2 t 1 ] M G Bezier Basis Matrix and Blending Functions.")
40
Michael Eckmann - Skidmore College - CS 376 - Spring 2007 The Basis Matrix M for Bezier curves is: [ -1 3 -3 1 ] [ 3 6 3 0 ] [ -3 3 0 0 ] [ 1 0 0 0 ] Q(t) = [ t 3 t 2 t 1 ] M G So, what are the blending functions? Bezier Basis Matrix and Blending Functions
![Michael Eckmann - Skidmore College - CS Spring 2007 The Basis Matrix M for Bezier curves is: [ ] [ ] [ ] [ ] Q(t) = [ t 3 t 2 t 1 ] M G So, what are the blending functions.](http://images.slideplayer.com/30/9548132/slides/slide_40.jpg "Bezier Basis Matrix and Blending Functions.")
41
Michael Eckmann - Skidmore College - CS 376 - Spring 2007 The Blending functions are: -t 3 + 3t 2 -3t + 1 3t 3 + 6t 2 + 3t -3t 3 + 3t 2 t 3 These functions are the Bernstein polynomials which are of the form: C(n, k) t k (1 – t ) n-k where C(n,k) is the choose function. C(n,k) = n! / (k! ((n-k)!)) In the case where n=3 (cubic), we have k among 0,1,2,3, which gives one function per geometric element (point.) Bezier Basis Matrix and Blending Functions
 = n. / (k. ((n-k)!)) In the case where n=3 (cubic), we have k among 0,1,2,3, which gives one function per geometric element (point.) Bezier Basis Matrix and Blending Functions.")
43
Michael Eckmann - Skidmore College - CS 376 - Spring 2007 A nice feature of Bezier curves is: –Because the blending functions are symmetric to the lines t and 1-t, the sequence of points used to define a Bezier curve can be reversed without changing the shape of the curve. Both Bezier and Hermite curves are easy to make have G 1 or C 1 continuity at all the join points. It is not easy though to get C 2 continuity at the join points for Hermite and Bezier curves. Hermite and Bezier curves interpolate the points (that is, the curves go through the points). Splines are C 2 continuous. Bezier/Hermite Curves vs. Splines
. Splines are C 2 continuous. Bezier/Hermite Curves vs. Splines.")
44
Michael Eckmann - Skidmore College - CS 376 - Spring 2007 Splines are C 2 continuous. Natural cubic splines interpolate the control points and the coefficients of a natural cubic spline are dependent on all n control points. –expensive to invert an n+1 by n+1 matrix –moving one control point affects the entire curve B-splines are defined by m+1 control points, where m>=3. The control points are named P 0 through P m. –There are m-2 cubic polynomial, C 2 continuous curve segments joined together. These segments are named Q 3 through Q m. –The join points (as well as the endpoints) of the B-spline are called knots. There are m-1 knots. –moving one control point has only a local effect (that is a good thing) –clearly the B-splines approximate (not interpolate) the control points –Let's look at the handout Splines
 of the B-spline are called knots. There are m-1 knots. –moving one control point has only a local effect (that is a good thing) –clearly the B-splines approximate (not interpolate) the control points –Let s look at the handout Splines.")
45
Michael Eckmann - Skidmore College - CS 376 - Spring 2007 Uniform = spacing between knots are equal (that is the difference in t between knots is uniform) –the blending functions for each segment have the same shape but are shifted Nonuniform = spacing between knots are unequal –more flexibility to control the curve shape than uniform –2 or more consecutive knots that are the same reduce the continuity there (e.g., if we have 0 difference between 2 or more knots then continuity is reduced by 1 (i.e., C 2 -> C 1 continuity)) Rational = each spline curve segment is defined as a ratio of polynomials –are invariant under rotation, scaling, translation AND perspective transformations of the control points. So, we apply the perspective transform to the control points and then generate the perspectively transformed curve from the transformed control points to obtain the correct view of the curve. –in addition to the myriad of curves that can be produced, they can precisely define the conic sections (e.g. circle, ellipse, parabola, hyperbola) NURBS = NonUniform Rational B-Splines B-Splines
 NURBS = NonUniform Rational B-Splines B-Splines.")
46
Michael Eckmann - Skidmore College - CS 376 - Spring 2007 NURBS = NonUniform Rational B-Splines –used frequently in graphics packages due to the properties just described Nonrational = each spline curve segment is defined as a polynomial (not a ratio of polynomials) –has the disadvantage (compared to rational B-splines) that they are not invariant to perspective transformations as well as cannot precisely describe the conics B-Splines
 –has the disadvantage (compared to rational B-splines) that they are not invariant to perspective transformations as well as cannot precisely describe the conics B-Splines")
47
Michael Eckmann - Skidmore College - CS 376 - Spring 2007 Recall that we defined parametric cubic curves as Q(t) = T M G. For surfaces we define a parametric cubic surface with two parameters, hence Q(s,t) for some particular value of s, say s 1, Q(s 1,t) is a parametric curve. Also, for some particular value of t, say t 1, Q(s,t 1 ) is a parametric curve. [ G 1 (t) ] Q(s,t) = S M G(t) = S M [ G 2 (t) ] [ G 3 (t) ] [ G 4 (t) ] Curve Surfaces
 for some particular value of s, say s 1, Q(s 1,t) is a parametric curve. Also, for some particular value of t, say t 1, Q(s,t 1 ) is a parametric curve. [ G 1 (t) ] Q(s,t) = S M G(t) = S M [ G 2 (t) ] [ G 3 (t) ] [ G 4 (t) ] Curve Surfaces.")
Similar presentations













 Review of Spline Concepts Sections 10-6 to 10-13 in Hearn & Baker Splines can be 2D.>")


 COMS 4162, Lecture 12: Spline Curves (review) Ravi Ramamoorthi Most material.>")





