Download presentation
Presentation is loading. Please wait.

1
1.Introduction about camera auto balancing system of UAV 2.Proposal auto balancing platform 3.Step by step solving rotation (attitude) of an IMU O Outline
 of an IMU O Outline")
2
UAV is without pilot, it has some problems when taking the picture from camera because of vibration of UVA when plying due to disturbance such as wind … To overcome this problem; an auto-balancing photogrammetric platform was designed in this project. A proposed auto-balancing photogrammetric platform includes an Inertial Measurement Unit (IMU) for measuring three angles of Roll, Pitch, and Yaw. With this proposed platform, we can easily take a photo from camera with small disturbance by auto adjusting three angles of Roll, Pitch, and Yaw to get desired direction O Introduction
 for measuring three angles of Roll, Pitch, and Yaw. With this proposed platform, we can easily take a photo from camera with small disturbance by auto adjusting three angles of Roll, Pitch, and Yaw to get desired direction O Introduction.")
3
Proposal auto balancing platform A proposed platform includes a 4-link mechanism for motions around three directions corresponding to three angles of Roll, Pitch, and yaw which are measured by an Inertial Measurement Unit (IMU). Three servo motors are used as actuator for rotating around three directions. This proposed platform will be mounted at UAV. Direction of platform can be set and controlled by a microcontroller via PID algorithm. Schematic of a proposed platform was shown in Figure.

4
CAMERA IMU (Time1) MCU Arduino2560(PID) MCU Arduino2560 IMU (Timer2) Wifi overview camera auto balancing system UAV
 MCU Arduino2560(PID) MCU Arduino2560 IMU (Timer2) Wifi overview camera auto balancing system UAV")
5
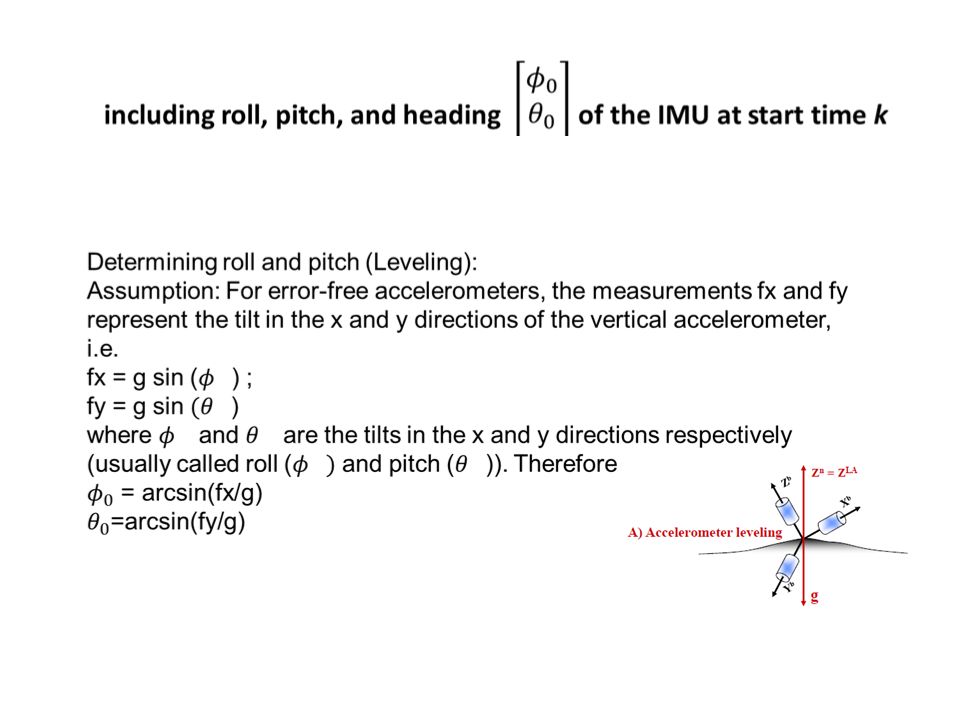
Step 1 : Initialization (alignment): To determine the initial attitude including roll, pitch, and heading. Step 2 : Parameter transformation. Step3 : Update attitude. O Step by step solving rotation (attitude) of an IMU Figure 1: local level frameFigure 2: Attitude presentation
 of an IMU Figure 1: local level frameFigure 2: Attitude presentation.")
7
Determining heading (Gyro compassing)
")
Similar presentations

















>")

 Liam O’Sullivan - 06308627. 2 HLO-4 Autonomous Hovering Flight SR-D-05 and 06 Receive and process sensor data (50 Hz) IMU Compass.>")