Download presentation
Presentation is loading. Please wait.

1
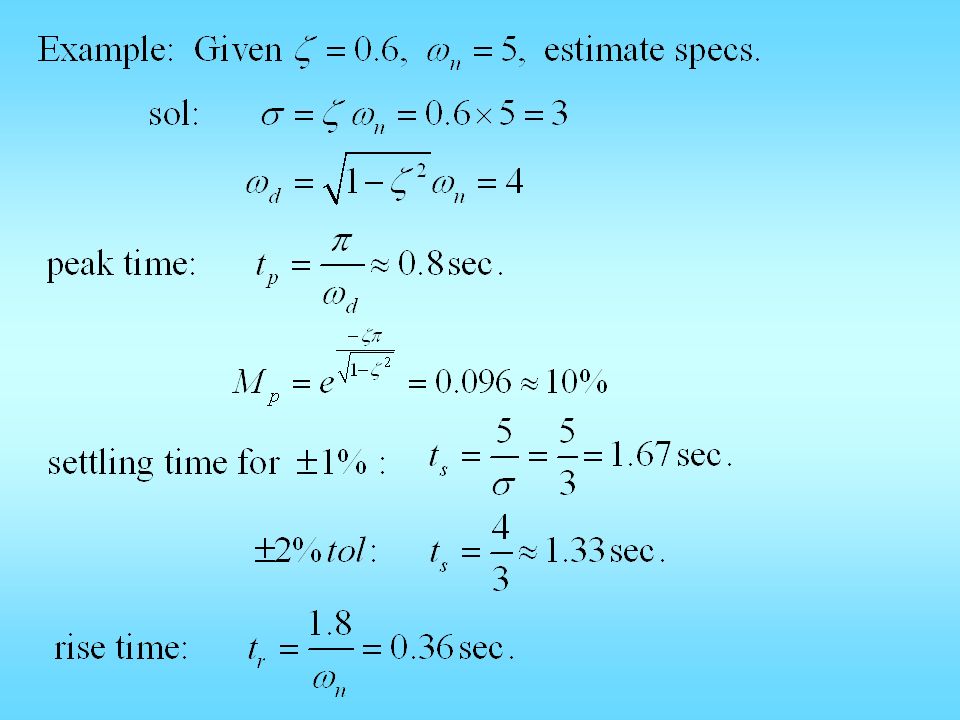
Time domain response specifications Defined based on unit step response with i.c. = 0 Defined for closed-loop system

2
Prototype 2 nd order system: target

3
Prototype 2 nd order system:

4
Settling time: Remember:

6
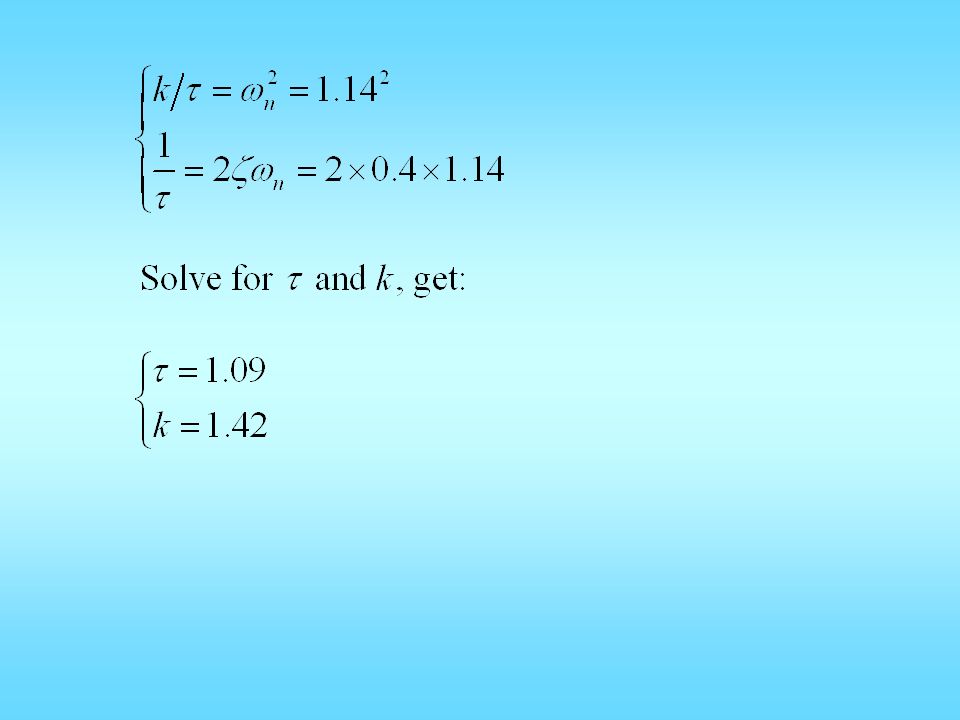
+ - Example: When given unit step input, the output looks like: Q: estimate k and τ.

9
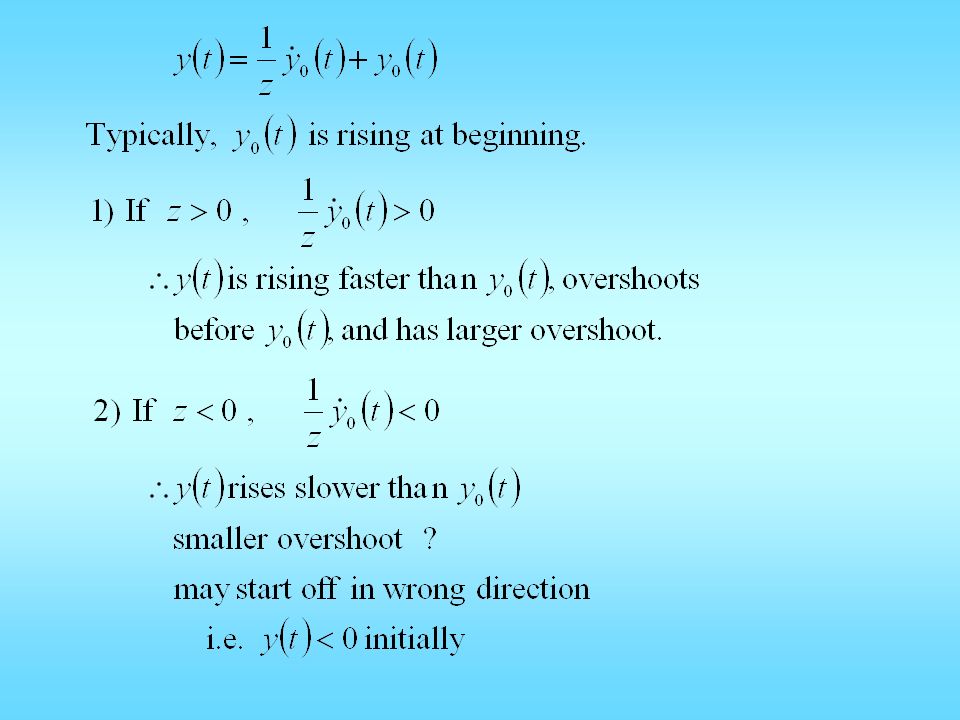
Effects of additional zeros Suppose we originally have: i.e. step response Now introduce a zero at s = -z The new step response:

11
Effects:Increased speed, Larger overshoot, Might increase t s

12
When z 0, is in the right half plane. Such a zero is called a nonminimum phase zero. A system with nonminimum phase zeros is called a nonminimum phase system. Nonminimum phase zero should be avoided in design. i.e. Do not introduce such a zero in your controller.

13
Effects of additional pole Suppose, instead of a zero, we introduce a pole at s = -p, i.e.

14
L.P.F. has smoothing effect, or averaging effect Effects:Slower, Reduced overshoot, May increase or decrease t s

15
Stability BIBO-stable: Def: A system is BIBO-stable if any bounded input produces bounded output. Otherwise it’s not BIBO-stable.

16
Asymptotically Stable A system is asymptotically stable if for any arbitrary initial conditions, all variables in the system converge to 0 as t→∞ when input=0. A system is marginally stable if for all initial conditions, all variables in the system remain finite, but for some initial conditions, some variable does not converge to 0 as t→∞. A system is unstable if there are initial conditions that can cause some variables in the system to diverge to infinity. A.S., M.S. and unstable are mutually exclusive.

17
Asymptotically Stable

18
Asymptotically Stable vs BIBO-stable Thm: If a system is A.S., then it is BIBO-stable If a system is not BIBO-stable, then it cannot be A.S., it has to be either M.S. or unstable. But BIBO-stable does not guarantee A.S. in general. If there is no pole/zero cancellation, then BIBO-stable Asymp Stable

19
Characteristic polynomials Three types of models: Assume no p/z cancellation System characteristic polynomial is:

20
A polynomial is said to be Hurwitz or stable if all of its roots are in O.L.H.P A system is stable if its char. polynomial is Hurwitz A nxn matrix is called Hurwitz or stable if its char. poly det(sI-A) is Hurwitz, or if all eigenvalues have real parts<0
 is Hurwitz, or if all eigenvalues have real parts<0.")
21
Routh-Hurwitz Method From now on, when we say stability we mean A.S. / M.S. or unstable. We assume no pole/zero cancellation, A.S.BIBO stable M.S./unstable not BIBO stable Since stability is determined by denominator, so just work with d(s)
.")
22
Routh Table

23
Repeat the process until s 0 row Stability criterion: 1)d(s) is A.S. iff 1 st col have same sign 2)the # of sign changes in 1 st col = # of roots in right half plane Note: if highest coeff in d(s) is 1, A.S. 1 st col >0 If all roots of d(s) are <0, d(s) is Hurwitz
the # of sign changes in 1 st col = # of roots in right half plane Note: if highest coeff in d(s) is 1, A.S. 1 st col >0 If all roots of d(s) are <0, d(s) is Hurwitz.")
24
Example: ←has roots:3,2,-1

25
(1*3- 2*5)/1=-7 (1*10- 2*0)/1=10 (-7*5- 1*10)/-7
/1=-7 (1*10- 2*0)/1=10 (-7*5- 1*10)/-7")
27
Remember this

29
e.g.

30
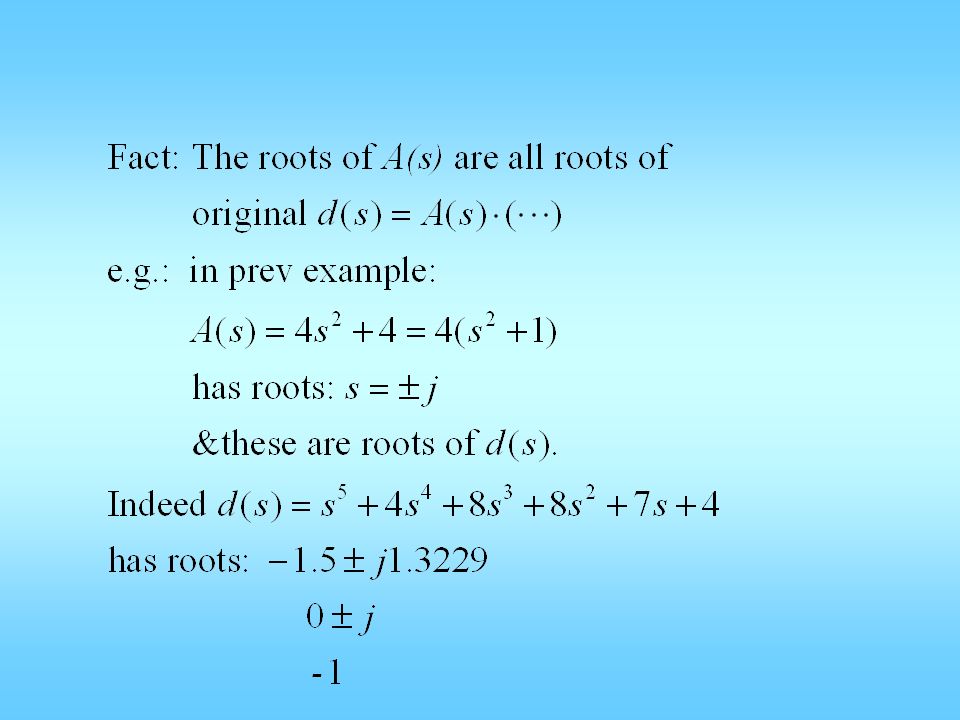
Routh Criteria Regular case: (1) A.S. 1 st col. all same sign (2)#sign changes in 1 st col. =#roots with Re(.)>0 Special case 1: one whole row=0 Solution: 1) use prev. row to form aux. eq. A(s)=0 2) get: 3) use coeff of to replace 0-row 4) continue as usual
>0 Special case 1: one whole row=0 Solution: 1) use prev. row to form aux. eq. A(s)=0 2) get: 3) use coeff of to replace 0-row 4) continue as usual.")
31
Example ←whole row=0

38
Replace by

40
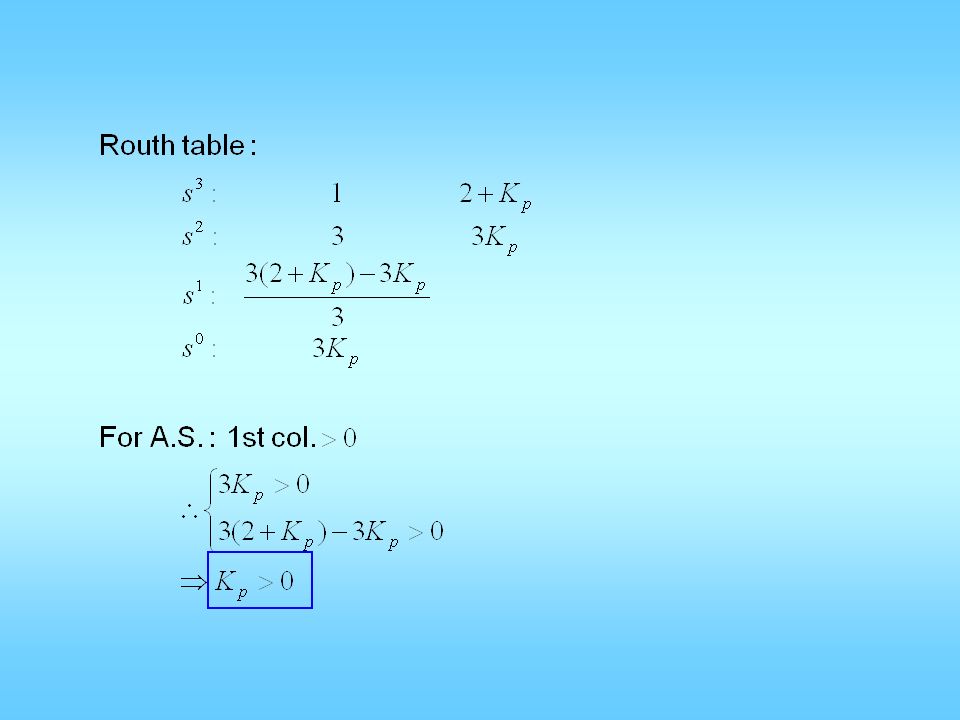
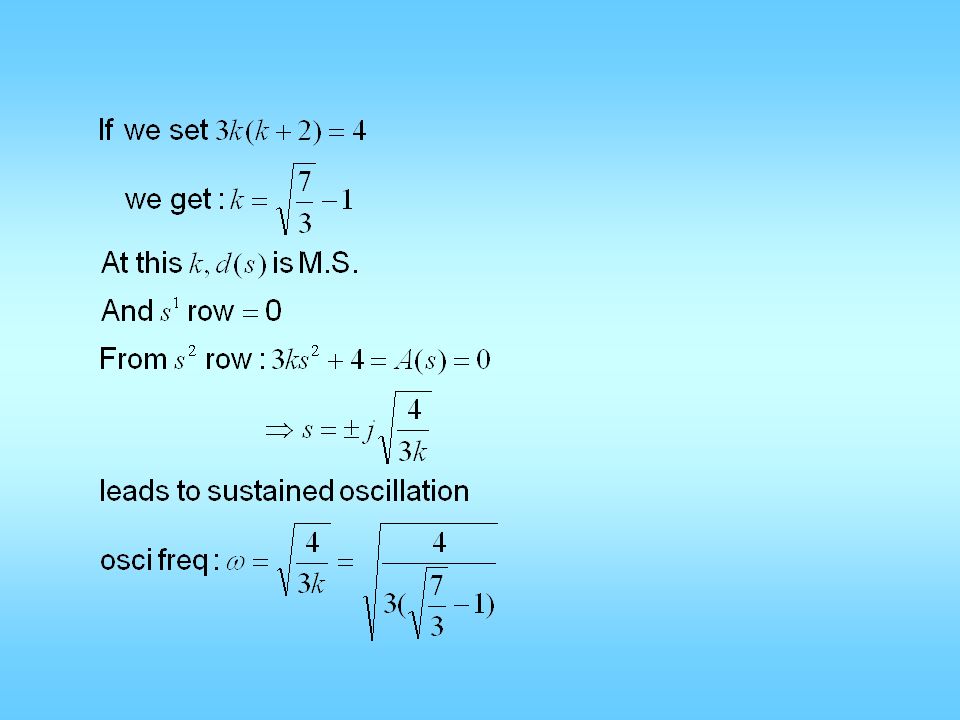
Useful case: parameter in d(s) How to use: 1) form table as usual 2) set 1 st col. >0 3) solve for parameter range for A.S. 2’) set one in 1 st col=0 3’) solve for parameter that leads to M.S. or leads to sustained oscillation
 solve for parameter range for A.S. 2’) set one in 1 st col=0 3’) solve for parameter that leads to M.S. or leads to sustained oscillation.")
41
Example s+3 s(s+2)(s+1) K p +
(s+1) K p +")
46
Q: find region of stability in K- plane. K

Similar presentations














 -- Stability 7.1 Bounded-Input Bounded-Output (BIBO) Stability 7.2 Asymptotic Stability 7.3 Lyapunov.>")





: -Effect of forcing system with u(t) -IMPORTANT!!:>")








 Date: 11 th September 2008 Prepared by: Megat Syahirul Amin bin Megat Ali>")
