Download presentation
Presentation is loading. Please wait.

1
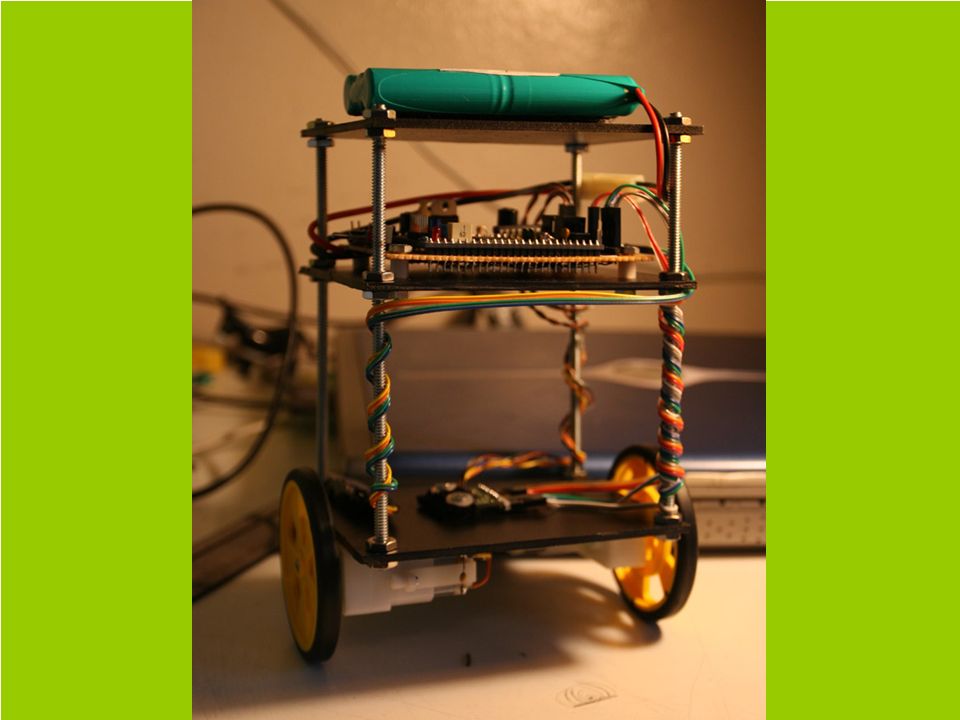
Gyro (yee-roh) Designed by Joshua Lewis
 Designed by Joshua Lewis")
3
Introduction Inverted Pendulum ATMega MicroProcessor Inertial Measurement Unit PID Control Algorithm

4
The Inverted Pendulum Axis of Rotation Center of Mass Attitude

5
Integrated System Atmel ATMega128 Inertial Measurement Unit Wheel Encoders BlueSMiRF (Embedded Bluetooth Serial RF Link) Texas Instruments Motor Driver Liquid Crystal Display
 Texas Instruments Motor Driver Liquid Crystal Display")
6
Inertial Measurment Unit Analog Devices ADXL330 Accelerometer InvenSense IDG-300 Gyroscope

7
Control Algorithm Hand Tuned Feedback Loop

8
Control Algorithm One Dimensional Kalman Filter Input Biased Angular Rate Gyro and Zeroed Accelerometer Two State Output (Angle & Gyro Bias) Angular Rate Byproduct of Computation
 Angular Rate Byproduct of Computation")
9
PID Control Algorithm Torque = Kp*Angle + Kd*AngleRate + Kv*WheelSpeed Gain Coefficients Are Tweaked By User During Run-Time Via Bluetooth Serial Wireless Link

10
THE END!

Similar presentations














Danish GPS Center2 Table of Contents Definition of Attitude Attitude and GPS Attitude Representations.>")




