Download presentation
Presentation is loading. Please wait.

1
Sean M. Ficht

2
Problem Definition Previous Work Methods & Theory Results

3
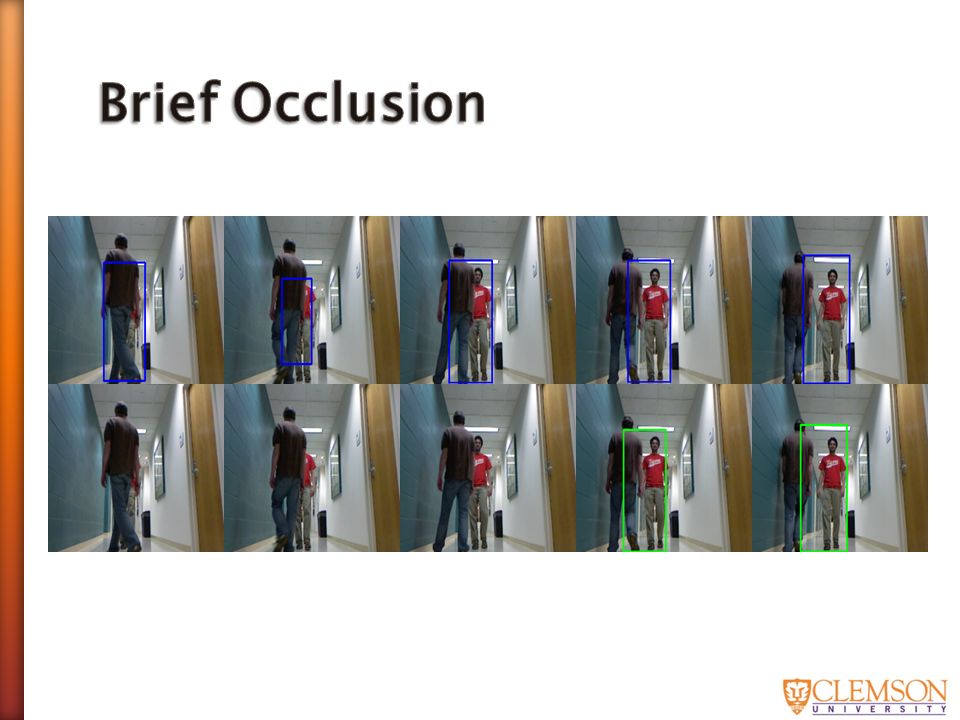
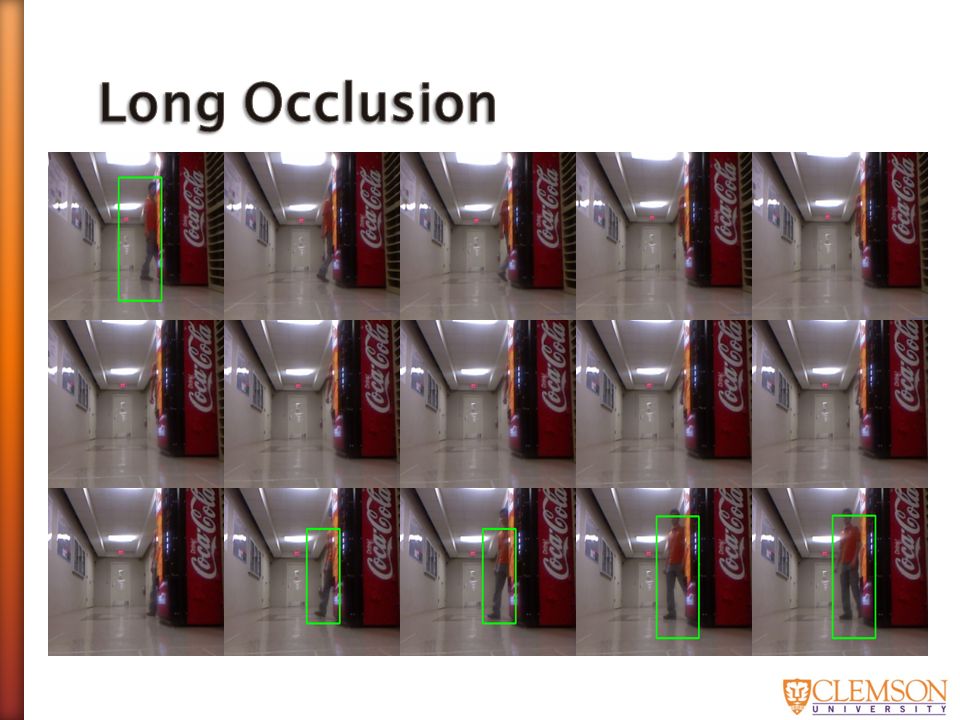
Track and follow specific person with a mobile robot Cluttered environments Brief occlusion Long occlusion Cooperative user

4
Helper robot Carry items for a person Example: Hospital situation

5
Problem Definition Previous Work Methods & Theory Results

6
Person following with a mobile robot Appearance based Optical flow based Stereo vision based

7
Segmentation of image Classification Detection Limitations Sidenbladh, Kragic, and Christensen; ICRA; 1999 Tarokh and Ferrari; Journal of Robotic Systems; 2003 Schlegel, Illman, Jaberg, Schuster, and Worz; British Machine Vision Conference; 2005

8
Calculate optical flow Use to segment image Limitations Chivilo, Mezzaro, Sgorbissa, and Zaccaria; IROS; 2004 Piaggio, Fornaro, Piombo, Sanna, and Zaccaria; IEEE ISIC/CIRA/ISAS joint conference; 1998

9
Find features Segment from background Use to track Limitations Zhichao and Birchfield; IROS; 2007

10
Problem Definition Previous Work Methods & Theory Results

11
Kinect Provides a depth image Provides a RGB color image Packaged solution

12
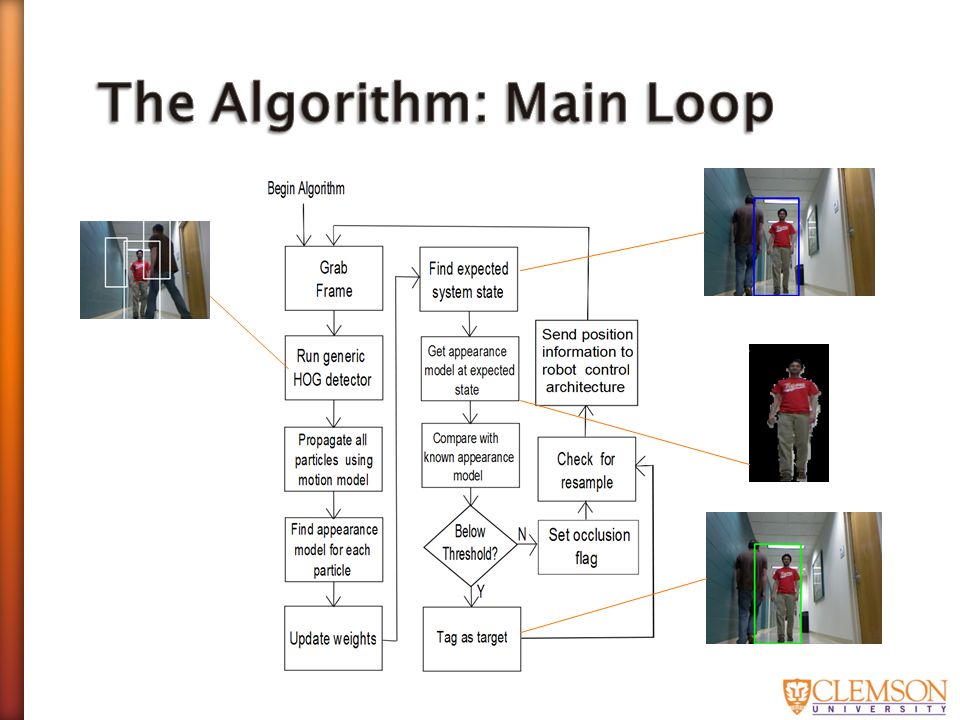
Detection and Tracking Generic detector Specific appearance model Integrating particle filter Robot Control

13
HOG person detector (OpenCV) HOG descriptor o Cells -> Block -> Window o 4 cells in a block o 105 blocks in a window o 64x128 window Training Dalal and Triggs, CVPR, 2005
 HOG descriptor o Cells -> Block -> Window o 4 cells in a block o 105 blocks in a window o 64x128 window Training Dalal and Triggs, CVPR, 2005")
14
Gradient of the Image Binning of pixels in cells Grouping of cells into blocks Normalization

15
Kernel convolution Magnitude = (g x 2 + g y 2 ) Angle = arctan(g y /g x ) Directional change in intensity
 Angle = arctan(g y /g x ) Directional change in intensity")
16
Bins apply to each cell Nine separate bins Gradient magnitude added to bin

17
Cells grouped into blocks 4 cells per block Blocks overlap one another

18

19
HOG person detector HOG descriptor o Cells -> Block -> Window o 4 cells in a block o 105 blocks in a window o 64x128 window Training

20
Support Vector Machine (SVM) classifier Binary classifier Trained on images
 classifier Binary classifier Trained on images")
21
Detection and Tracking Generic detector Specific appearance model Integrating particle filter Robot Control

22
Color Histogram Segmentation by depth to create template

23
Represents distribution of colors 10 bins for each color channel 1000 element color histogram Pixel classification 2 bin example Bin 1: 0-127 Bin 2: 128-255

24
Average depth Threshold (0.3 meters) Template used to make color histogram
 Template used to make color histogram")
25
Detection and Tracking Generic detector Specific appearance model Integrating particle filter Robot Control

26
System State Motion model Observation model Expected state Resample

27
Hybrid state space X and Y in image coordinates Scaled according to depth Z in depth coordinates

28

29

30

31

32

35
Detection and Tracking Generic detector Specific appearance model Integrating particle filter Robot Control

36
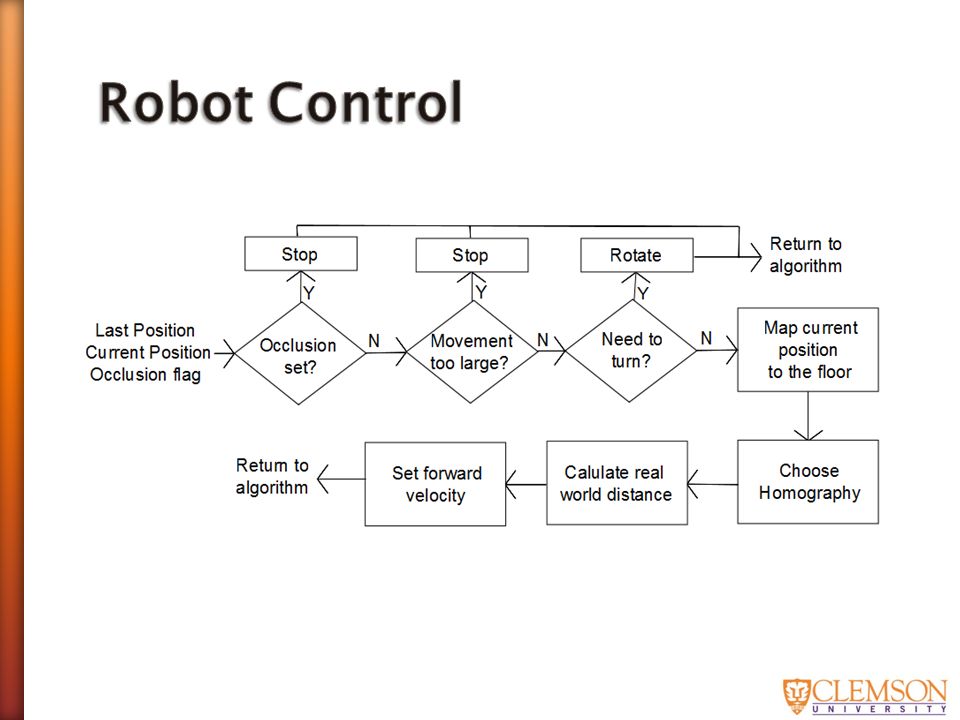
Input: tracking information from tracking algorithm Uses tracking information to make movement decisions Executes movement and returns to tracking algorithm

38
Problem Definition Previous Work Methods & Theory Results

39
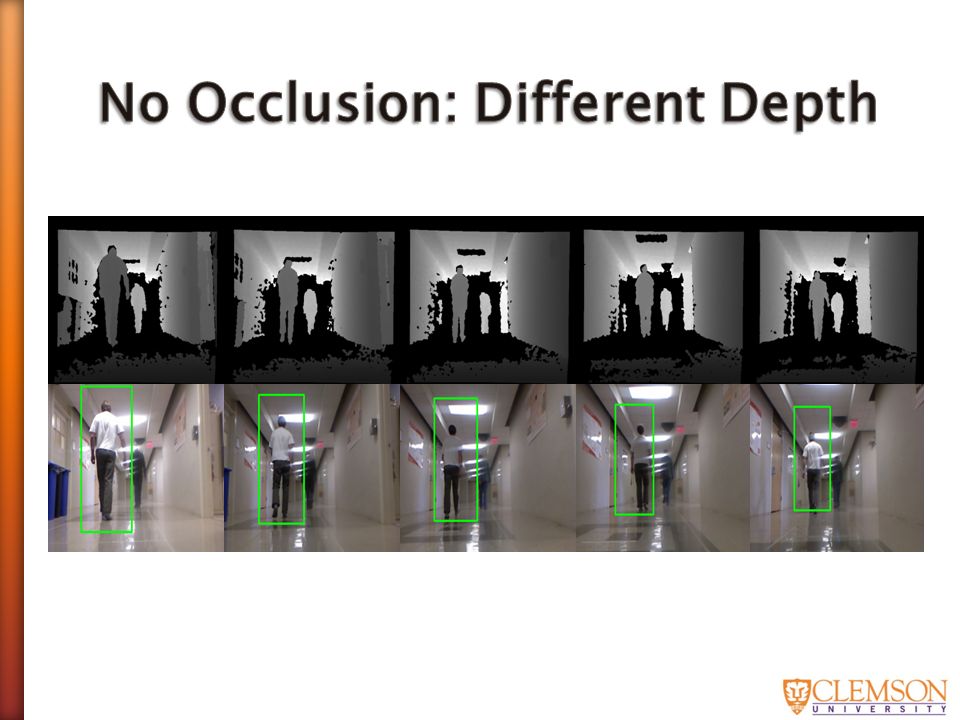
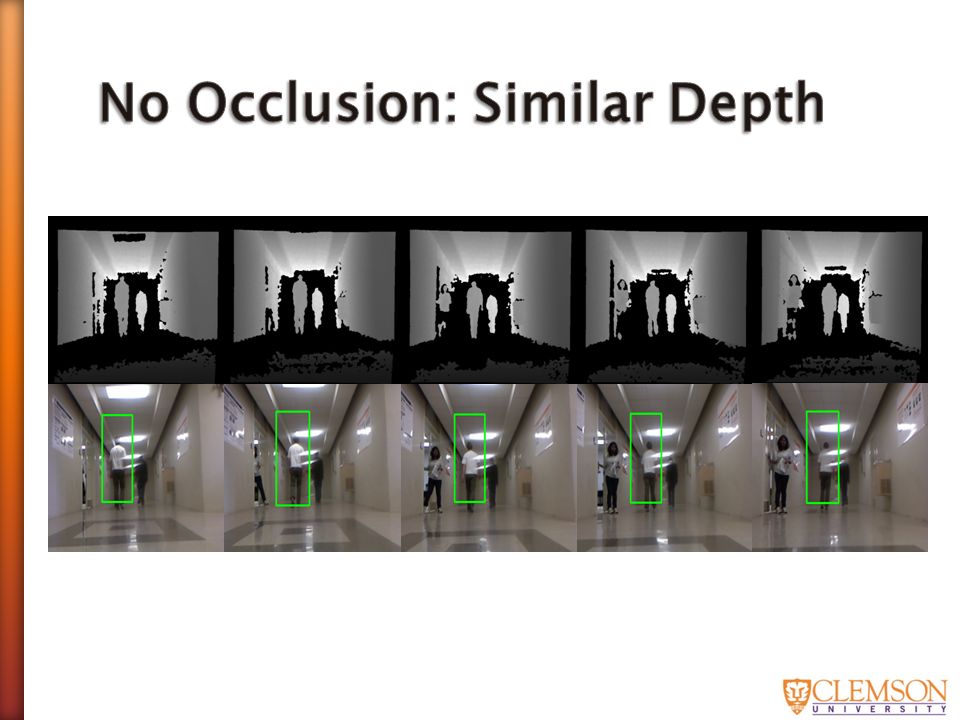
No occlusion Other people present (different depth) Other people present (similar depth) Pose change Brief occlusion Long occlusion
 Other people present (similar depth) Pose change Brief occlusion Long occlusion")
42
Initial template

46
Initial template Non-occluded target Occluded target

47
Average between 73% and 74%

50
Problem Follow a person in different scenarios System RGB-D sensor Generic detector Specific appearance model Particle filter Robot control architecture Performance Performed in three separate test scenarios Rapid side to side target motion trade-off Large target scale changes

51
Train a new HOG detector to handle scale issues Using more particles KLT features for trajectory histories Adaptive appearance model

Similar presentations





 encoding.>")





 cv:hci Dr. Edgar Seemann 1 Computer Vision: Histograms of Oriented.>")












