Download presentation
Presentation is loading. Please wait.

1
Layered Object Detection for Multi-Class Image Segmentation UC Irvine Yi Yang Sam Hallman Deva Ramanan Charless Fowlkes

2
Introduction PASCAL competition 20 object categories + “background” Goal Desired result

3
Introduction

5
* We use part-based detectors from Felzenszwalb, Gorelick, McAllester, & Ramanan PAMI 09

6
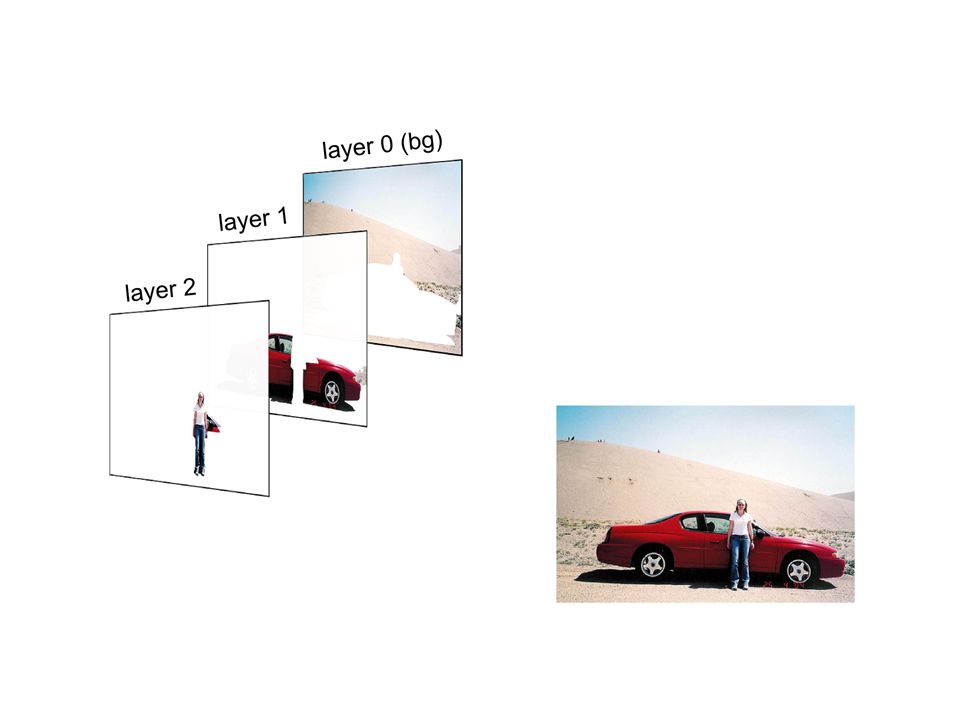
Layered Representation Model each detection in “2.1D”: detections ordered by depth Desired result

7
Related work Related work combining segmentation and recognition – Biasing segmentation output based on object models [Yu et al. 03, Ramanan 06, Kumar et al. 05] – Iterating between bottom-up and top-down cues [Leibe et al. 04, Tu et al. 05] Related work on layers – Work in the video domain [Wang & Adelson 94, Jojic & Frey 01, Kumar et al. 04] – Some work in image domain [Gao et al. 07, Nitzberg et al. 93]

8
Issues Need detector thresholds Need comparable confidence scores

9
Detector calibration Find optimal threshold for pixel labeling

17
Model

18
Inference: coordinate descent Step 1: Step 2: (fit color models to segments and background) (per-pixel segmentation given shape prior & color likelihood) Color models are learned on-the-fly for each detection instance (e.g., people may wear blue or red shirts)
 (per-pixel segmentation given shape prior & color likelihood) Color models are learned on-the-fly for each detection instance (e.g., people may wear blue or red shirts)")
19
Use hierarchical segmentation of Arbelaez, Maire, Fowlkes, Malik (2009) at a threshold which generates ~200 segments per image. Bottom-up segmentation

20
Inference: coordinate descent Step 1: Step 2: (fit color models to segments and background) (per-pixel segmentation given shape prior & color likelihood) = set of pixel labelings consistent with superpixel map
 (per-pixel segmentation given shape prior & color likelihood) = set of pixel labelings consistent with superpixel map")
21
Building P(z i |d π ) person detections true positives ground truth segmentations shape prior for the person class
 person detections true positives ground truth segmentations shape prior for the person class")
22
Shape priors (cont’d)
")
25
Bicycle part-based priors

26
Motorcycle part-based priors

27
Horse part-based prior

28
Bottle part-based priors

29
Building P(z i |d π )
")
30
[ 1, 0, 0, 0, 0, 0 ] [ 0.1, 0.9, 0, 0, 0, 0 ] [ 0.099, 0.891, 0.01, 0, 0, 0 ]
![[ 1, 0, 0, 0, 0, 0 ] [ 0.1, 0.9, 0, 0, 0, 0 ] [ 0.099, 0.891, 0.01, 0, 0, 0 ]](http://images.slideplayer.com/26/8729193/slides/slide_30.jpg "[ 1, 0, 0, 0, 0, 0 ] [ 0.1, 0.9, 0, 0, 0, 0 ] [ 0.099, 0.891, 0.01, 0, 0, 0 ]")
31
Building P(z i |d π ) [ 1, 0, 0, 0, 0, 0 ] [ 0.1, 0.9, 0, 0, 0, 0 ]
![Building P(z i |d π ) [ 1, 0, 0, 0, 0, 0 ] [ 0.1, 0.9, 0, 0, 0, 0 ]](http://images.slideplayer.com/26/8729193/slides/slide_31.jpg "Building P(z i |d π ) [ 1, 0, 0, 0, 0, 0 ] [ 0.1, 0.9, 0, 0, 0, 0 ]")
32
Building P(z i |d π ) [ 1, 0, 0, 0, 0, 0 ] [ 0.1, 0.9, 0, 0, 0, 0 ] [ 0.099, 0.891, 0.01, 0, 0, 0 ]
![Building P(z i |d π ) [ 1, 0, 0, 0, 0, 0 ] [ 0.1, 0.9, 0, 0, 0, 0 ] [ 0.099, 0.891, 0.01, 0, 0, 0 ]](http://images.slideplayer.com/26/8729193/slides/slide_32.jpg "Building P(z i |d π ) [ 1, 0, 0, 0, 0, 0 ] [ 0.1, 0.9, 0, 0, 0, 0 ] [ 0.099, 0.891, 0.01, 0, 0, 0 ]")
33
Building P(z i |d π )
")
41
The algorithm There is no secret method for finding π… Just try all of them! Luckily, the number of permutations to test is usually small. :

42
Results!

46
PASCAL 2009 Segmentation Challenge Performs well where detector works well (objects with well defined, fairly rigid shapes)
")
47
Color helps person segmentation Superpixels really help bikes Parts provide small but noticeable improvement What aspects of the model are useful?

48
Does ordering help? Default ordering based on detector score works fairly well (after calibration) PASCAL segmentation benchmark limitations: – images often only have a single object – scoring is per-class rather than per-instance Ordering between same class detections doesn’t affect benchmark score We found ordering helped on a subset of PASCAL with overlapping objects
 PASCAL segmentation benchmark limitations: – images often only have a single object – scoring is per-class rather than per-instance Ordering between same class detections doesn’t affect benchmark score We found ordering helped on a subset of PASCAL with overlapping objects.")
49
Conclusions A simple layered model for compiling multi- object detections into segmentations – Deformable shape prior built on part-based detector – Per-instance color model Provides a globally consistent 2.1D interpretation Good performance on PASCAL segmentation benchmark

50
Thanks!

Similar presentations



















>")

>")




>")


 Alexei A. Efros.>")
 2013: Detection spotlights.>")





 A variational approach to learning model- based segmentation. John Winn Microsoft Research.>")

