Download presentation
Presentation is loading. Please wait.

1
Adaptive Rigid Multi-region Selection for 3D face recognition K. Chang, K. Bowyer, P. Flynn Paper presentation Kin-chung (Ryan) Wong 2006/7/27
 Wong 2006/7/27.")
2
The ARMS algorithm ARMS stands for Adaptive Rigid Multi-region Selection The result of first-hand knowledge: Face Recognition Grand Challenge, versions 1 and 2 Kevin Bowyer, Kyong Chang, Patrick Flynn: the same authors of the Notre Dame survey on 3D and 3D+2D face recognition (2004-2006).
.")
3
Main objectives Use 3D shape information alone Based on state-of-the-art methods In their survey, Iterative Closest Point (ICP), along with Linear Discriminant Analysis (LDA) are reported as the best performing algorithms for 3D face recognition Curvatures are used to locate landmark points Able to handle expressions Should perform well on FRGC v2
, along with Linear Discriminant Analysis (LDA) are reported as the best performing algorithms for 3D face recognition Curvatures are used to locate landmark points Able to handle expressions Should perform well on FRGC v2")
4
Issues in 3D face recognition Expressions: small Even when told to maintain neutral expressions, there will be small movements in 3D face surface. Expressions: large Some parts of face are more rigid than others. Comparing non-rigid 3D facial surfaces across expressions is still an unsolved problem. Solution: use rigid parts only use robust surface registration method

5
Curvature alone is not enough for recognition

6
Preprocessing 1. Face surface is down-sampled to reduce computations with little effect on accuracy 2. Use skin color detection on 2D image to detect face 3. Use curvature to segment face surface and detect landmark points 4. Use landmark points to normalize pose and initialize ICP Many techniques for preprocessing exist, but these are the more robust ones

7
Landmark detection with curvatures

8
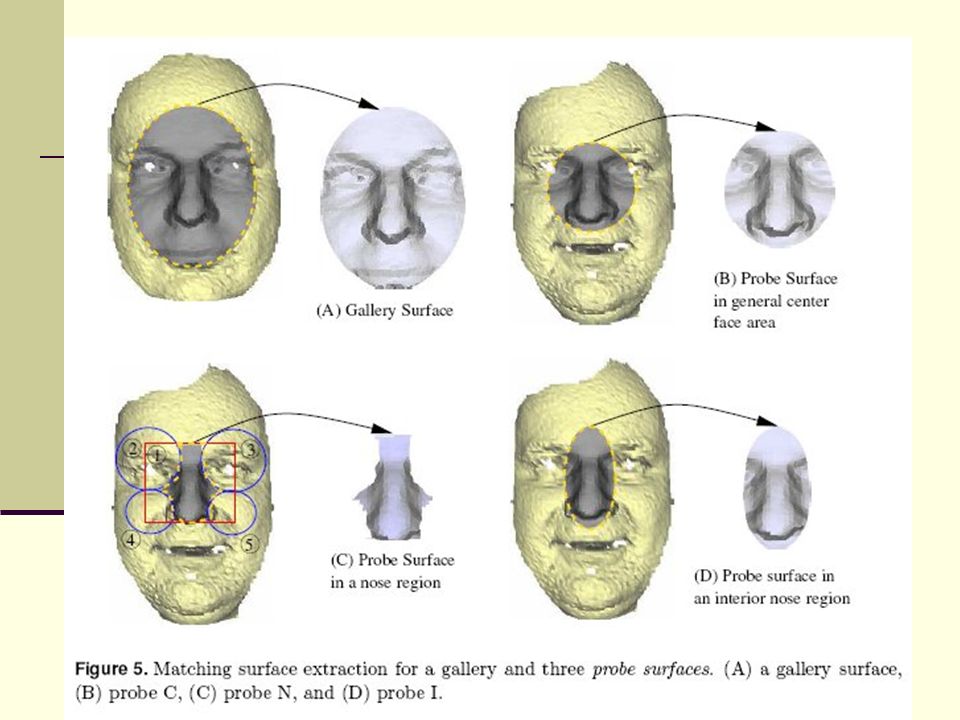
Multiple regions and Fusion Use multiple regions to compute similarity, and combine them later Use the nose region Relatively more rigid than the rest of the face Relatively low probability of occlusions Perform multiple ICP matches using multiple regions Match smaller probe surfaces to a larger gallery surface (a practical ICP technique) Use sum of squared distance (RMS) as dissimilarity measure
 Use sum of squared distance (RMS) as dissimilarity measure")
9
Registration Iterative Closest Point (ICP) is used to register a probe surface to a gallery surface. Rotates and translates the probe surface to match it with the gallery surface. Does not deform either surfaces. Provides good surface registration when facial expressions are present. Computationally intensive, requires pair-wise matching Requires good initialization, otherwise it will converge to wrong result

11
Rules for Fusion Three fusion rules: Sum Product Minimum

12
ICP, RMS similarity, and Fusion

13
Experiment – algorithms 1. ICP – baseline 2. PCA – baseline Landmark points are manually selected The whole face is used for matching 3. ARMS – auto Landmark points are detected by their algorithm automatically. Used for ROI selection and ICP initialization. 4. ARMS – manual Landmark points are selected manually.

14
Experiment – the dataset The dataset later becomes part of FRGC v2.0 Experimentation protocols are different The dataset makes it possible to evaluate: Neutral expressions vs. non-neutral expressions Time-lapse between gallery and probe

15
Results – Expressions

16
Results – Fusion 2 regions better than 1, but 3 doesn’t help

17
Areas for improvement Use more regions from other parts of face Examples: chin region Implicit expression modeling through intra-personal vs. inter-personal spaces Fusion: beyond sum, product and minimum Automatic learning (PCA, LDA, SVM) Committee machine
 Committee machine.")
18
Areas for improvement Faster ICP algorithm and implementation Spatial search technique Specialized data structure

19
Interesting side note – invariance The algorithms for computing mean and Gaussian curvatures are documented in great detail Their algorithm is Euclidean invariant and involves elements similar to Lin’s summation invariant Local coordinate transformation Least square fitting + curvature estimation second order monomial potentials Preliminary correspondence is being worked out

20
Thank you.

Similar presentations




 and g() such that the images are best.>")












 Solution to the P n P Problem CVLab - Ecole Polytechnique Fédérale de Lausanne Francesc Moreno-Noguer Vincent Lepetit Pascal.>")

 Other applications: Intra-subject:>")