Download presentation
Presentation is loading. Please wait.

1
CLOSED LOOP CONTROL OF DC DRIVES

3
Controller Requirements Fast tracking capability Less steady state error Robust to load disturbance during steady state and transient conditions.

4
Methods of speed control in DC drives

5
DC Motor Speed Control Torque Speed Maximum Torque By Changing Ra Ra increasing Power loss in Ra Does not maintain maximum torque capability Poor speed regulation

6
DC Motor Speed Control Torque Speed Maximum Torque Flux Decreasing T rated Slow transient response Does not maintain maximum torque capability By Decreasing Flux

7
DC Motor Speed Control Torque Speed Maximum Torque By Changing Armature voltage T rated Va increasing good speed regulation maintain maximum torque capability

8
Speed control of DC Motors Below base speed: Armature voltage control (retain maximum torque capability) Above base speed: Field weakening (i.e. flux reduced) (Trading-off torque capability for speed) Torque speed Line of Maximum Torque Limitation Armature voltage control Field flux control base
 (Trading-off torque capability for speed) Torque speed Line of Maximum Torque Limitation Armature voltage control Field flux control base.")
9
Armature and field control

10
In practice, for speeds less than the base speed (rated), the armature current and field currents are maintained at fixed values (hence constant torque operation), and the armature voltage controls the speed. For speeds higher than the base speed, the armature voltage is maintained at rated value, and the field current is varied to control the speed. However, this way the power developed Pd is maintained constant. This mode is referred to as “field weakening” operation.

17
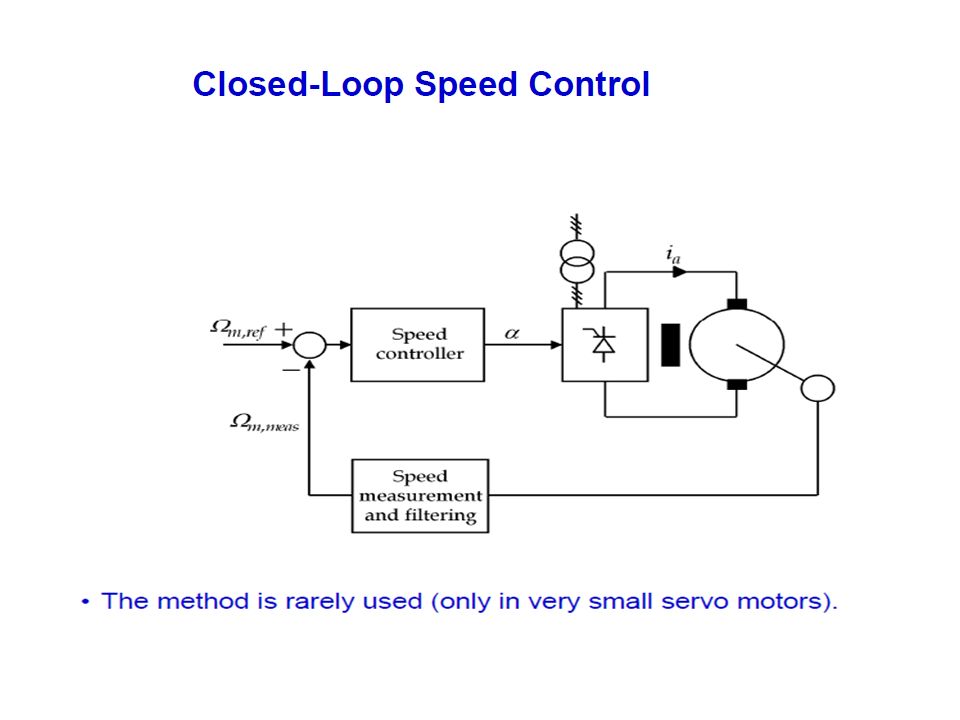
Block diagram of closed loop control

18
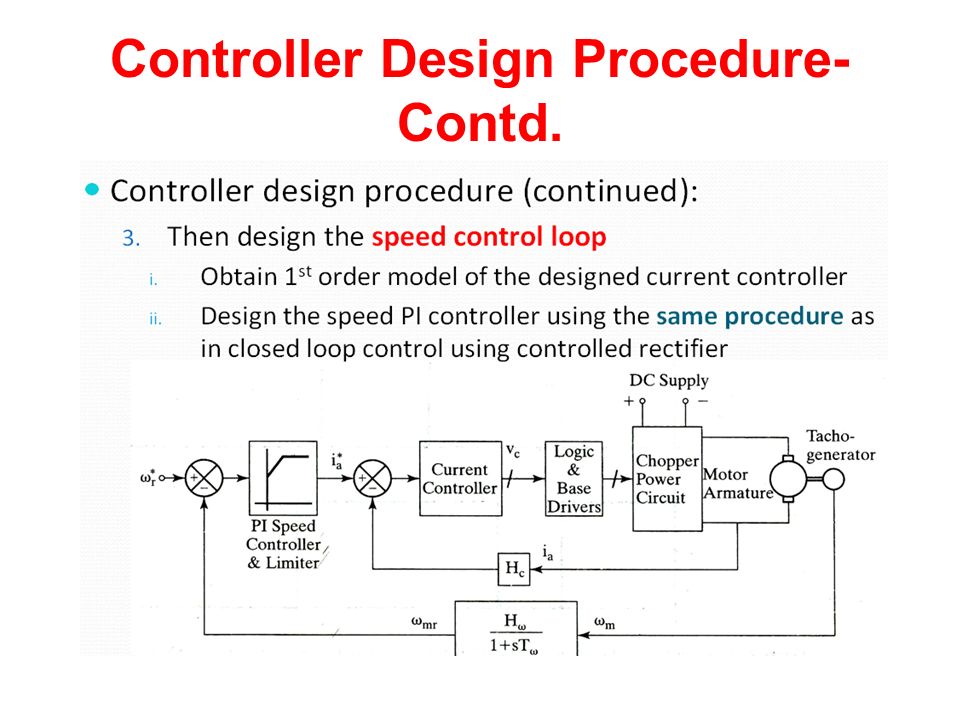
Controller Design Procedure

19
Controller Design Procedure- Contd.

21
Transfer Function of Motor

23
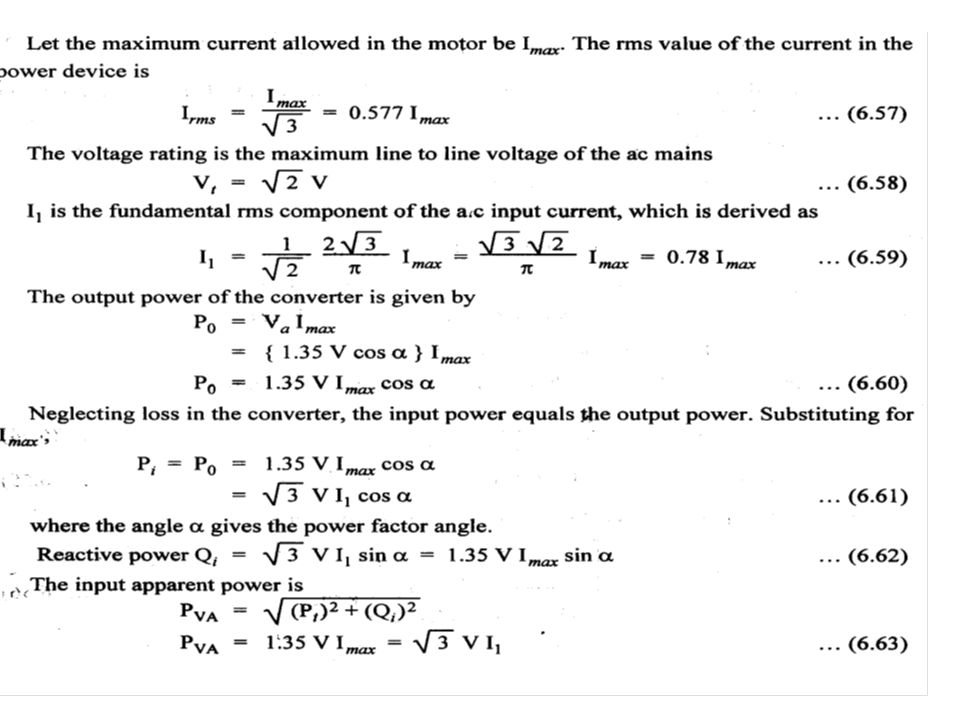
Transfer Function of Converters

24
CURRENT CONTROL FOR DC DRIVES To derive transfer function of converter, control techniques should be explained

25
Current Control for Chopper

28
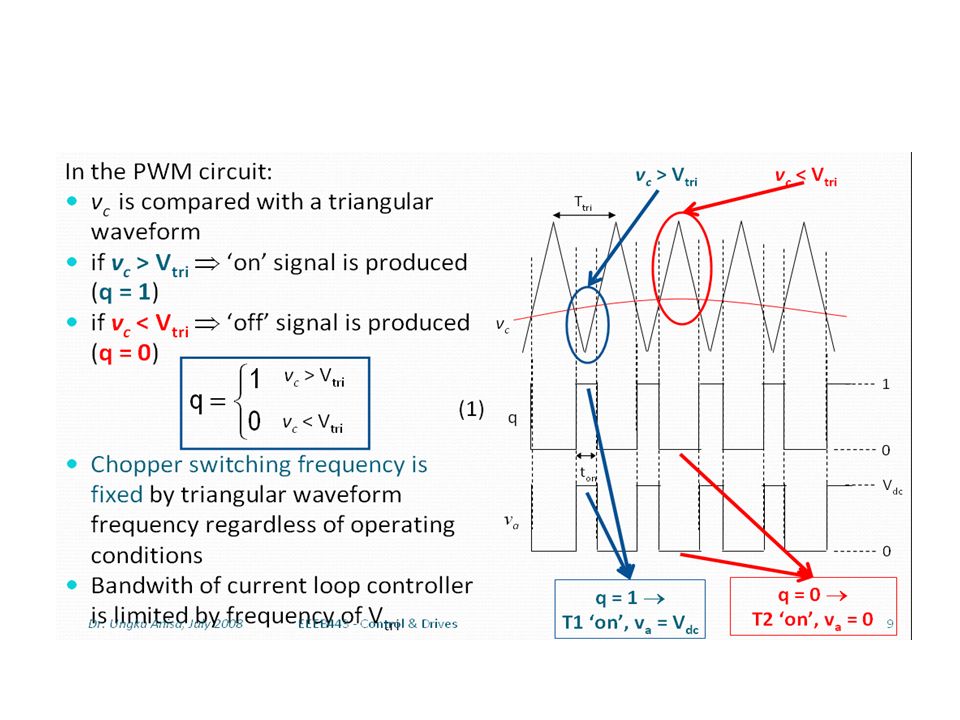
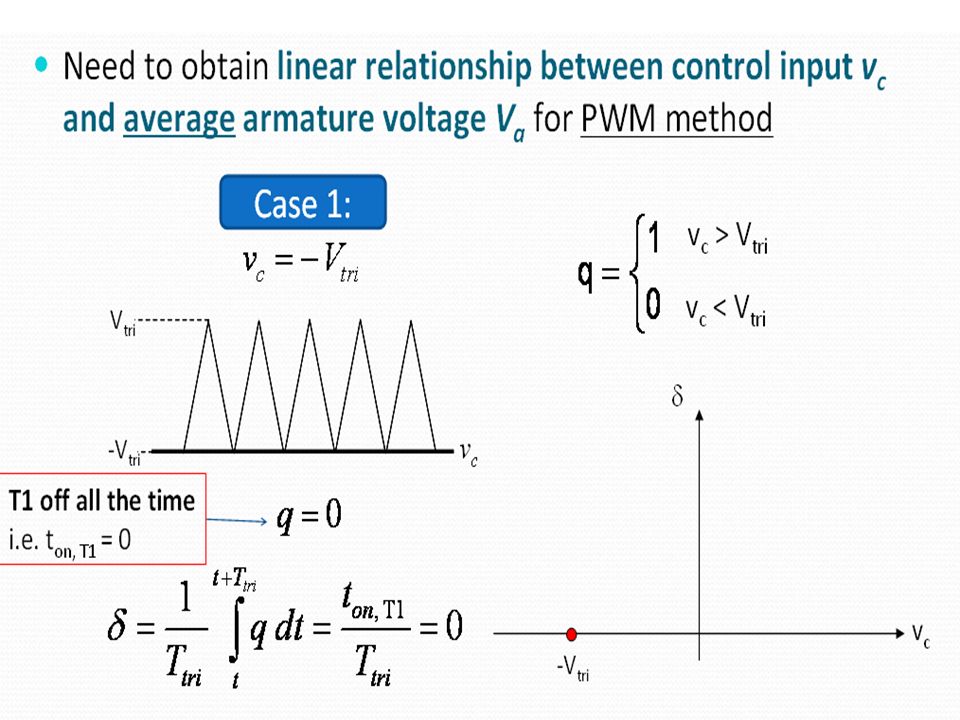
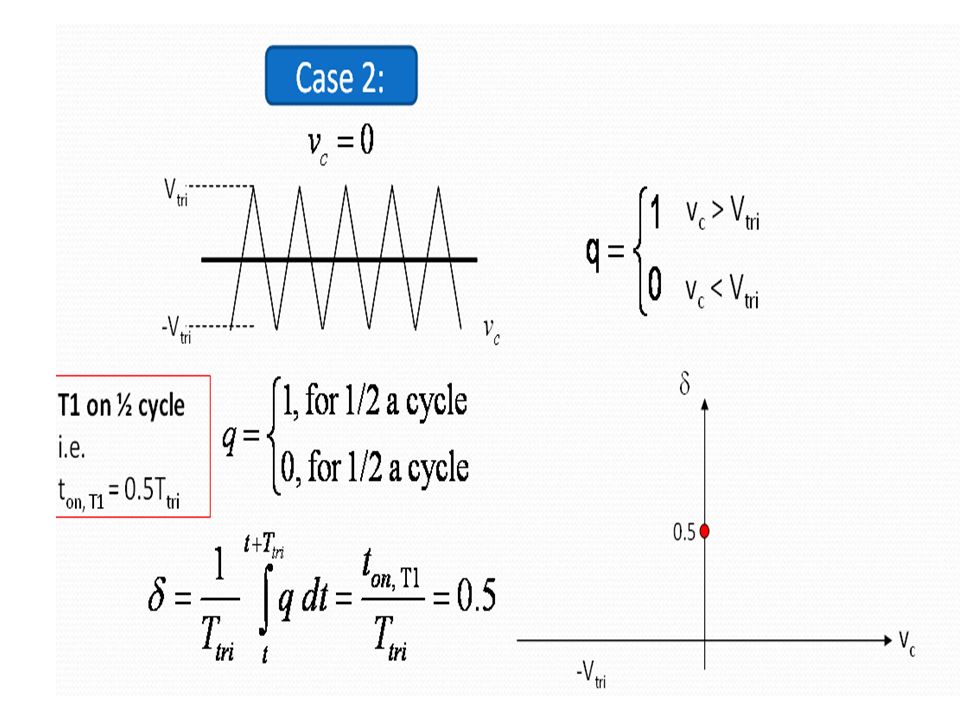
PWM Controller

29
Hysteresis Controller

31
Comparison

32
Transfer function of chopper drive

37
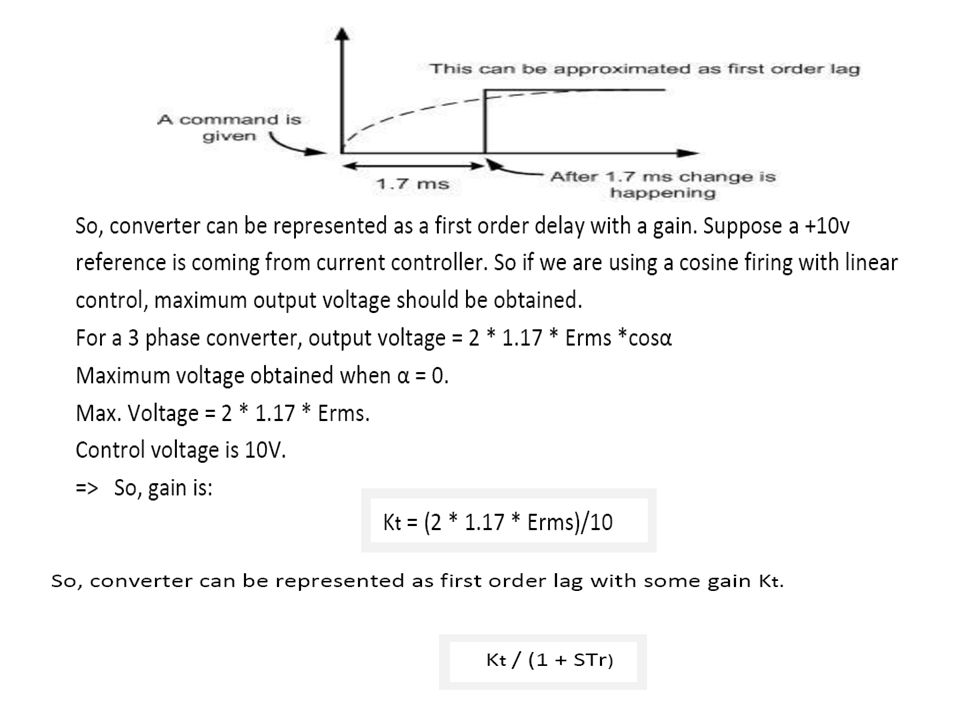
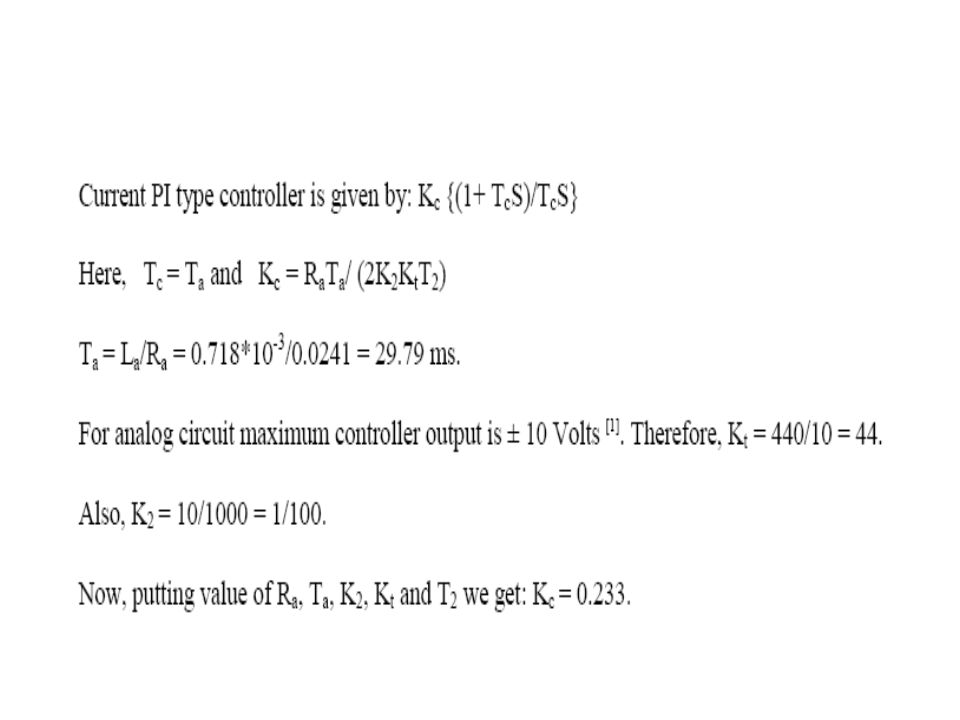
Three-phase Fully controlled Rectifier- transfer function

39
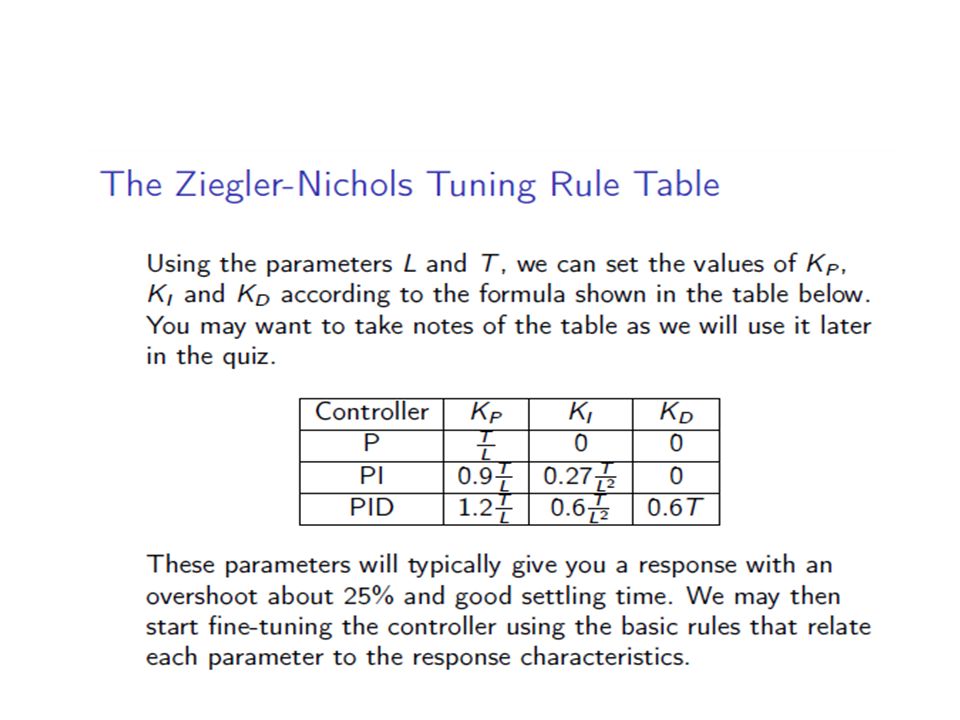
Introduction to PID Controllers for deriving the transfer function of current& speed controllers

45
About Kp value

46
About Ki value

47
About Kd value

48
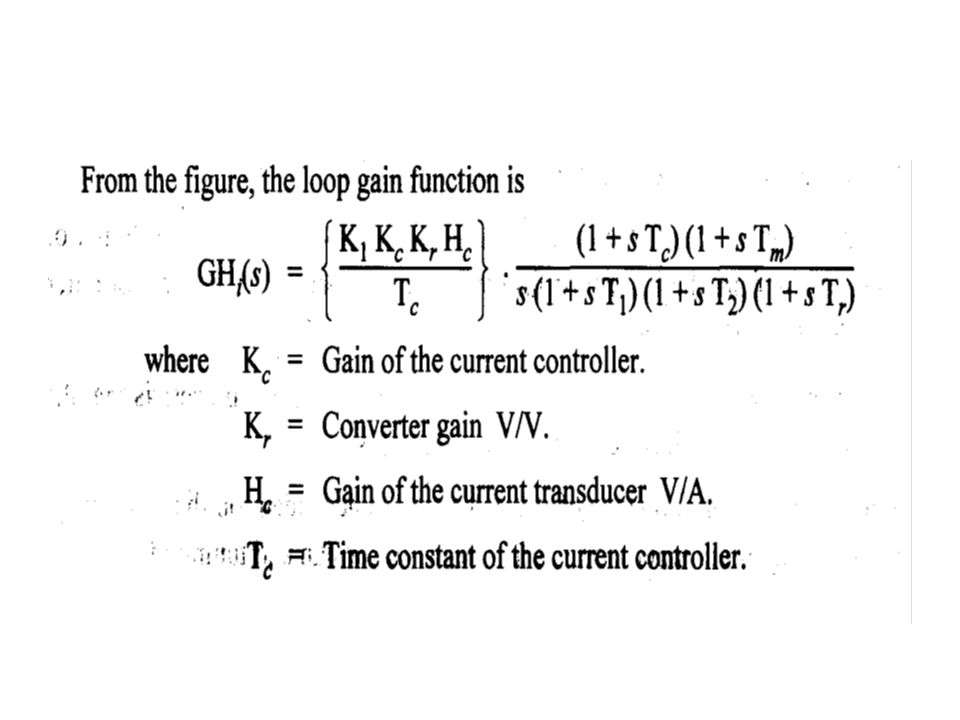
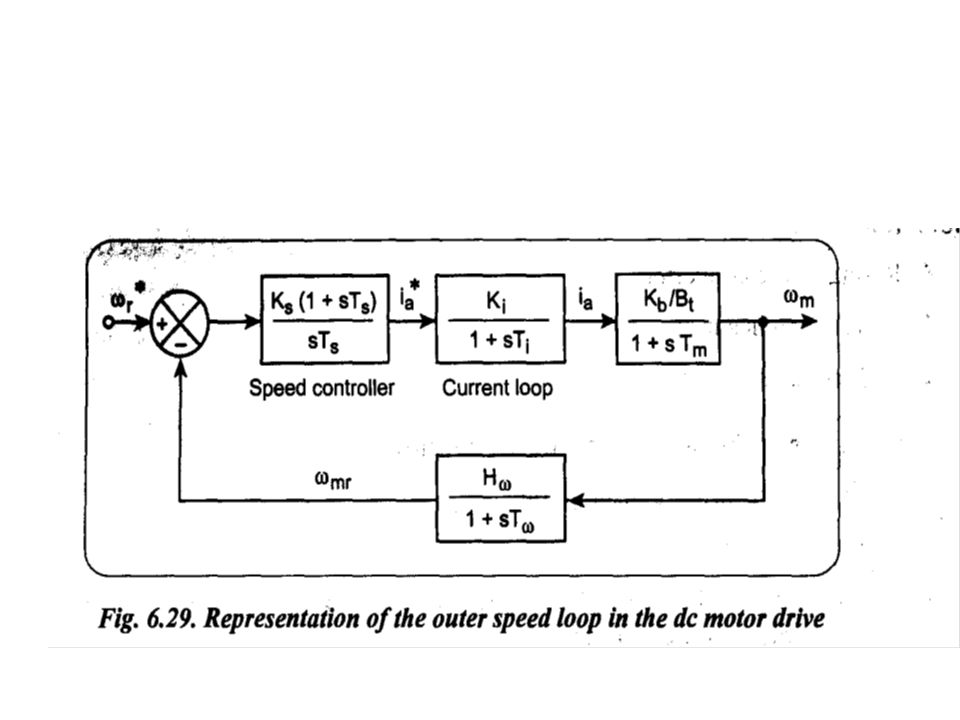
Overall block diagram

62
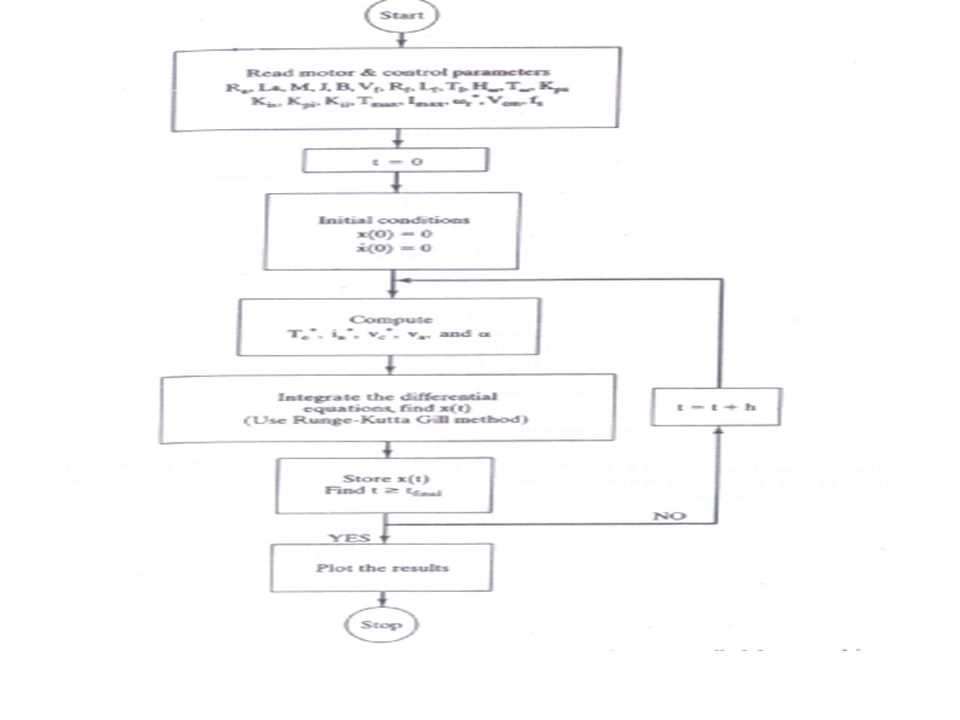
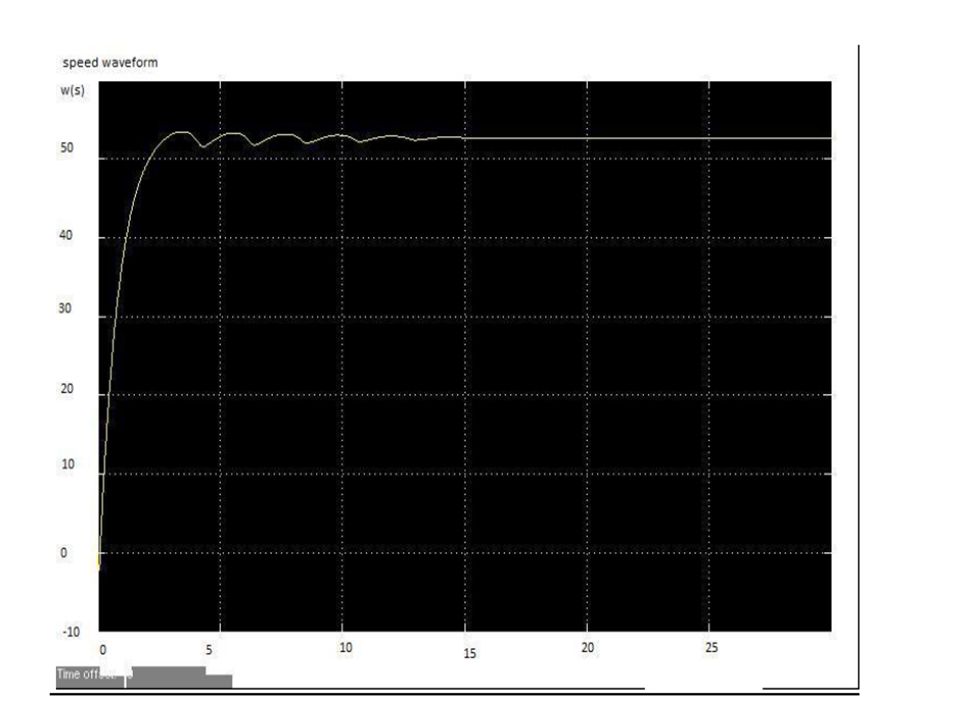
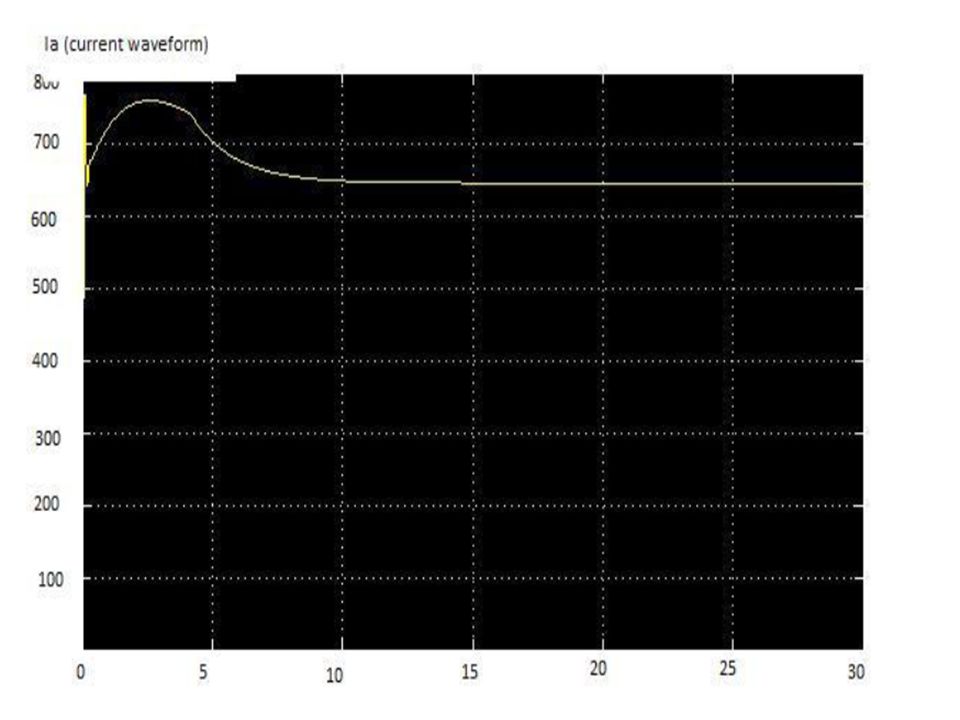
Simulation

Similar presentations

























 Universiti Putra Malaysia 11-12 August, 2004 Dr. Nik Rumzi Nik Idris Department.>")


>")
>")







 control system, generally with Single Input-Single Output (SISO) A.>")

. Dynamics of Motor Load Systems J moment of inertia kg-m2 instantaneous angular velocity rad/sec T developed torque.>")



