Download presentation
Presentation is loading. Please wait.

1
DARPA Robotics Challenge www.cs.cmu.edu/~cga/dw

2
Day 1

3
Real Time Finals

4
Optimization All The Way Down Multi-level optimization: –Footstep Optimization (Discrete + Continuous) –Trajectory Optimization (Continuous) –Optimization-Based Inverse Dynamics: Greedy continuous optimization (Quadratic Program = QP) for full body at the current instant. Trials

5
Multi-Level Control Trajectory: External forces at contacts drive center of mass (COM). Rotation is more complicated: –Constant angular momentum –Rigid body equivalent –General case QP: Redundancies and constraints resolved for full body behavior. Trials

6
LIPM Trajectory Optimization X vs, Time Y vs. Time COM Footstep COM X vs. Y meters Trials

7
Optimization-Based “Inverse Dynamics” (QP) Objectives: Dynamics Task Objectives COM Acceleration Torque About COM Reference Pose Tracking Minimize Controls Constraints: Center of Pressure Friction Cone Joint Torque Limits M. de Lasa, I. Mordatch, and A. Hertzmann, “Feature-Based Locomotion Controllers,” ACM Transactions on Graphics, vol. 29, 2010. Stephens Trials

8
Stuck on the door Finals

9
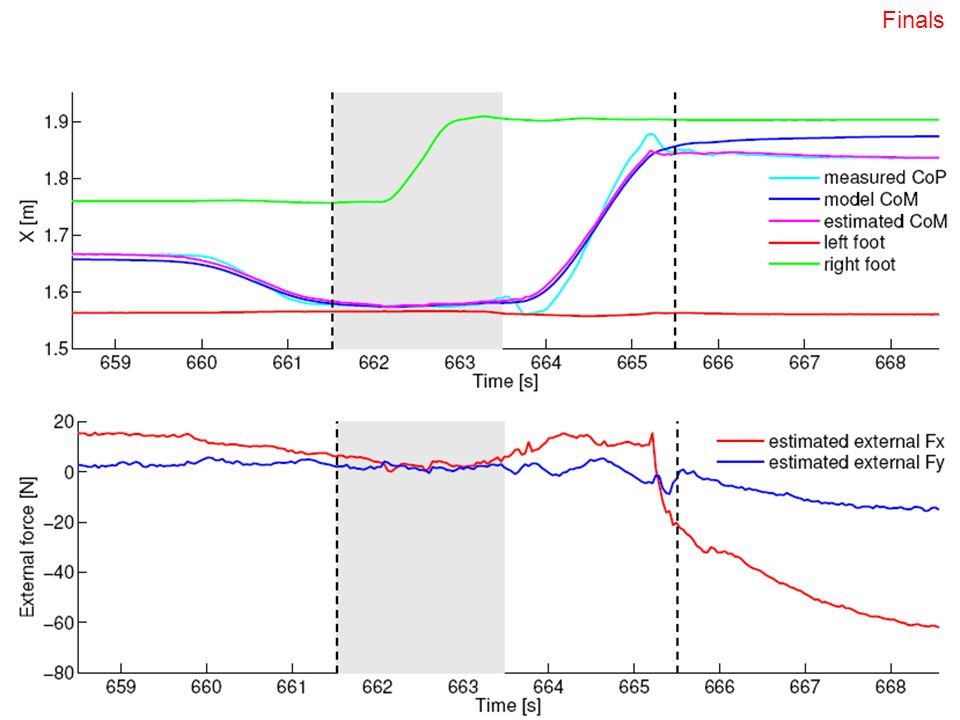
Handling modeling error and external forces Finals

11
Failed manipulation Finals

12
Fall Predictors Finals

13
A bad step Finals

14
Why Dynamics Matters

15
Wheels win? All wheeled/tracked robots plowed through debris. All other robots walked over rough terrain. KAIST – walked on stairs Nimbro, RoboSimian – no stairs Leg/wheel hybrids good if there is a flat floor somewhere under the pile of debris. Wheeled/tracked vehicles fell: need to consider dynamics, need to be able to get up (CHIMP, NimbRo), and get un-stuck. Finals
, and get un-stuck. Finals.")
16
Whole-Body Locomotion No robot used railings, walls, door frames, or objects in the environment for physical guidance, stabilization, or support. Some robots used arms to get out of the car. Finals

17
Can Atlas Be Human Like? www.cs.cmu.edu/~cga/dw Slow (0.5m/s) Slow (0.6s/step) Short steps 0.35m (half human 0.7m) Flat foot walking Bent knees No heel strike or toe push off Fixed pelvis orientation Minimal vertical COM acceleration -> GRF Minimal horizontal COM acc. -> GRF COP fixed at center of foot Not robust to external perturbations or modeling error. Soft ground, sand,…?
 Slow (0.6s/step) Short steps 0.35m (half human 0.7m) Flat foot walking Bent knees No heel strike or toe push off Fixed pelvis orientation Minimal vertical COM acceleration -> GRF Minimal horizontal COM acc. -> GRF COP fixed at center of foot Not robust to external perturbations or modeling error. Soft ground, sand,… .")
18
Baby Steps To Human-Like Walking Current

Similar presentations