Download presentation
Presentation is loading. Please wait.

1
Metaheuristic – Threshold Acceptance (TA)
")
2
2 Outlines ▪ Measuring Computational Efficiency ▪ Construction Heuristics ▪ Local Search Algorithms ▪ Metaheuristic – Threshold Accepting Algorithm (TA) ▪ Traveling Salesman Problem (TSP)
 ▪ Traveling Salesman Problem (TSP)")
3
3 Measuring Computational Efficiency Consider the following algorithm for(i=0; i<n; i++) { for(j=0;j<m;j++) { c[i][j] = a[i][j] + b[i][j]; } Total number of operations: Addition: (+) m*n + (++) m*n + (++) n => (2m+1)*n*C 1 Assignments: (=) m*n + (=) n + (=) 1 => (m+1)*n +1*C 2 Comparisons: ( (m+1)*n*C 3
![3 Measuring Computational Efficiency Consider the following algorithm for(i=0; i<n; i++) { for(j=0;j<m;j++) { c[i][j] = a[i][j] + b[i][j]; } Total number of operations: Addition: (+) m*n + (++) m*n + (++) n => (2m+1)*n*C 1 Assignments: (=) m*n + (=) n + (=) 1 => (m+1)*n +1*C 2 Comparisons: ( (m+1)*n*C 3](http://images.slideplayer.com/34/8349459/slides/slide_3.jpg "3 Measuring Computational Efficiency Consider the following algorithm for(i=0; i<n; i++) { for(j=0;j<m;j++) { c[i][j] = a[i][j] + b[i][j]; } Total number of operations: Addition: (+) m*n + (++) m*n + (++) n => (2m+1)*n*C 1 Assignments: (=) m*n + (=) n + (=) 1 => (m+1)*n +1*C 2 Comparisons: ( (m+1)*n*C 3")
4
4 Measuring Computational Efficiency Which one is faster? (a) (b)
 (b)")
5
5 Measuring Computational Efficiency ▪ Running Time log(n) < n < n 2 < n 3 < 2 n < 3 n
 < n < n 2 < n 3 < 2 n < 3 n")
6
6 Measuring Computational Efficiency ▪ Big-O notation f(n) is O(g(n)) : if there is a real number c > 0 and an integer constant n 0 ≥ 1, such that f(n) ≤ cg(n) for every integer n ≥ n 0. ▪ Examples 7n-2 is O(n) 20n 3 +10nlogn+5 is O(n 3 ) 2 100 is O(1)
 20n 3 +10nlogn+5 is O(n 3 ) is O(1).")
7
7 Measuring Computational Efficiency ▪ Big-O notation O(log(n)) < O(n) < O(n log(n)) <O(n 2 ) < O(n 3 ) <O(2 n ) <O(3 n ) logarithmiclinearpolynomialexponential O(log n)O(n)O(n k ), k ≥1O(a n ), a ≥1
) < O(n) < O(n log(n)) <O(n 2 ) < O(n 3 ) <O(2 n ) <O(3 n ) logarithmiclinearpolynomialexponential O(log n)O(n)O(n k ), k ≥1O(a n ), a ≥1")
8
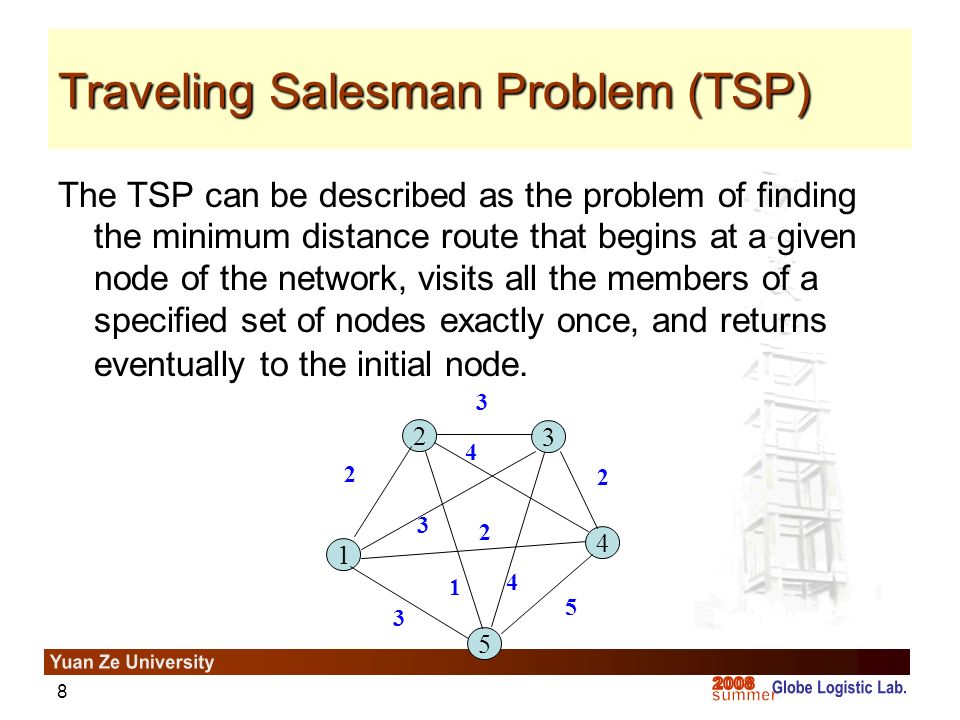
8 Traveling Salesman Problem (TSP) The TSP can be described as the problem of finding the minimum distance route that begins at a given node of the network, visits all the members of a specified set of nodes exactly once, and returns eventually to the initial node. 2 3 1 4 5 3 5 2 3 2 1 3 2 4 4
9
9 Construction Heuristics ▪ Greedy Algorithms: ▪Using an index to fix the priority for solving the problem ▪Less flexibility to reach optimal solution ▪Constructing an initial solution for improvement algorithms ▪ Example: ▪Northwest corner and minimum cost matrix for transportation problem

10
10 Construction Heuristics ▪ Nearest neighbor procedure – O(n 2 ) ▪ Nearest insertion – O(n 2 ) ▪ Furthest insertion – O(n 2 ) ▪ Cheapest insertion – O(n 3 ) or – O(n 2 logn) (using heap)
 ▪ Nearest insertion – O(n 2 ) ▪ Furthest insertion – O(n 2 ) ▪ Cheapest insertion – O(n 3 ) or – O(n 2 logn) (using heap)")
11
11 Construction Heuristics ▪ Nearest insertion for TSP 1.Start with a subgraph consisting of node i only 2.Find node k such that c ik is minimal and form the subtour i-k-i 3.Given a subtour, find node k not in the subtour closest to any node in the tour. (selection) 4.Find the arc(i, j) in the subtour which minimizes c ik +c kj -c ij. Insert k between i and j. (Insertion) 5.Go to step3 unless we have a Hamiltonian cycle
 4.Find the arc(i, j) in the subtour which minimizes c ik +c kj -c ij. Insert k between i and j. (Insertion) 5.Go to step3 unless we have a Hamiltonian cycle.")
12
12 Construction Heuristics ▪ Nearest insertion for TSP Step 1: Suppose node 1 is chose as beginning. Step 2: The node 4 is selected such that subtour with minimal cost 2c 14 2 3 1 4 5 3 5 2 3 2 1 3 2 4 4

13
13 Construction Heuristics ▪ Nearest insertion for TSP Step 3: Node 3 is selected and inserted into the subtour in order to derive minimal cost. 1-3-4: 3+2=5 1-2-4: 2+4=6 1-5-4: 3+5=8 2 3 1 4 5 3 5 2 3 2 1 3 2 4 4

14
14 Construction Heuristics ▪ Nearest insertion for TSP Step 4: : Node 2 is selected and inserted into the subtour in order to derive minimal cost. 1-2-4: 2+4-2=4 1-2-3: 2+3-3=2 3-2-4 : 3+4-2=5 1-5-4: 3+5-2=6 1-5-3: 3+4-3=4 3-5-4: 4+5-2=7 2 3 1 4 5 3 5 2 3 2 1 3 2 4 4

15
15 Construction Heuristics ▪ Nearest insertion for TSP Step 4: : Node 5 is inserted into the subtour and total cost is 2+1+4+2+2 = 11 1-5-4: 3+5-2=6 2-5-3: 1+4-5=2 1-5-2: 3+1-2=2 3-5-4: 4+5-2=7 2 3 1 4 5 3 5 2 3 2 1 3 2 4 4

16
16 Local Search Algorithms ▪ Simplex method ▪ Convex ▪ Concave

17
17 Local Search Algorithms ▪ Integer linear programming ▪ Combinatorial optimization: ▪Knapsack Problem ▪TSP ▪Vehicle routing problem (VRP)
")
18
18 Local Search Algorithms ▪ Neighborhood ▪ Swap The neighborhood size of swap-based loacl search is n(n-1)/2 1234 2134 3214 4231 1324 4231 1234 1234 1324 1432 1243 3214 2134 1243 1432
/")
19
19 Local Search Algorithms Local Search ▪Local search starts from a initial solution and then move to neighbor solution iteratively. ▪ First improvement. ▪ Best improvement.

20
20 Local Search Algorithms Local Search for TSP ▪ 2-opt ▪ k-opt ▪ OR-opt

21
21 Local Search Algorithms Two-exchange local Search for TSP – 2-opt ▪The neighborhood size of 2-opt is n (n-1)/2 - n 3 2 3 1 4 5 3 5 2 2 3 2 3 1 4 5 3 5 4 3 3 2 3 1 4 5 3 5 2 2 2 3 1 4 5 3 2 1 2
/2 - n")
22
22 Local Search Algorithms Implementation of 2-opt with array

23
23 Threshold Accepting Algorithm (TA) ▪ Metaheuristic( 巨集啟發式演算法 ) ▪ Threshold Accepting was proposed by Deuck and Scheuer (1990). Ref: G. Dueck, T. Scheuer, “Threshold accepting. A generalpurpose optimization algorithm appearing superior tosimulated annealing”, Journal of Computational Physics 90 (1990) 161–175.
 161–175..")
24
24 Threshold Accepting Algorithm (TA) ▪ Metaheuristic( 巨集啟發式演算法 ) solutions objective Local optima globe otima
 ▪ Metaheuristic( 巨集啟發式演算法 ) solutions objective Local optima globe otima")
25
25 Threshold Accepting Algorithm (TA) TA refined local search algorithms overcome the problem of getting tuck in a local optimal solution by admitting a temporary worsening of the objective function during the iteration process. Accepting probability

Similar presentations










 Given n £ n positive distance matrix (d ij ) find permutation on {0,1,2,..,n-1} minimizing i=0 n-1 d (i), (i+1.>")








