Download presentation
Presentation is loading. Please wait.

1
PRACTICAL SYNTHESIS OF CONCURRENT SYSTEMS Martin Vechev Eran Yahav Greta Yorsh IBM T.J. Watson Research Center

2
2 Plan Motivation Case Study: Concurrent Data Structures Hoare’s CCR Finite State Abstract Interpretation Based Synthesis Memory Fences (Optional)
")
3
Concurrency is Important

4
Concurrency is Hard “…I develop Mozilla full time all day, and i get this lockup maybe once a day…”

5
Concurrency is Hard “…For nearly two weeks I thought the above solution was correct, until I started to try to prove its correctness...it turned out to be wrong… So there I was. Fooled again.” -- Edsger W. Dijkstra

6
Problem Manually Finding Correct and Efficient Synchronization 6

7
Our Approach Automatically Infer Correct and Efficient Synchronization 7

8
Input 8 Believable starting point – Intuitive to a programmer, e.g. sequential program Specification should be easy to write – Reusability: e.g. sequential consistency Some quantitative notion of efficiency – E.g. Fewer locks

9
9 Output should be a program – Synchronization implemented in the language Output program(s) should be correct – With respect to the specification (checked or verified) Output program(s) should be optimal – With respect to efficiency Output
 should be correct – With respect to the specification (checked or verified) Output program(s) should be optimal – With respect to efficiency Output")
10
10 Plan Motivation Case Study: Concurrent Data Structures Hoare’s CCR Finite State Abstract Interpretation Based Synthesis Memory Fences (Optional)
")
11
Concurrent Data Structures Applications (typically) have to share data Need to synchronize Concurrent data structures are critical for performance – Used in various language runtimes, kernels, etc Coarse Locks are often a bad idea – Single thread holding lock can stop global system progress – Coarse-grained locking leads to contention – Fine-grained locking tricky to get right (deadlocks) 11
 have to share data Need to synchronize Concurrent data structures are critical for performance – Used in various language runtimes, kernels, etc Coarse Locks are often a bad idea – Single thread holding lock can stop global system progress – Coarse-grained locking leads to contention – Fine-grained locking tricky to get right (deadlocks) 11")
12
val popRight() { while (true) { rh = RightHat; lh = LeftHat; if (rh->R == rh) return "empty"; if (rh == lh) { if (DCAS(&RightHat, &LeftHat, rh, lh, Dummy, Dummy)) return rh->V; } else { rhL = rh->L; if (DCAS(&RightHat, &rh->L, rh, rhL, rhL, rh)) { result = rh->V; rh->R = Dummy; return result; }}} “Even better DCAS-based concurrent deques”, DISC 2000 2 errors in < 20 lines of code ! Concurrent Data Structures

13
Existing Approaches for Concurrent Object Construction Performance Manual Effort Sequential Naïve STM Fine-grained STM Expert Design This Work Goal 13

14
14 bool add(int key) { Entry *pred,*curr,*entry restart: locate(pred,curr,key) k = (curr->key == key) if (k) return false entry = new Entry() entry->next = curr val=CAS(&pred- >next, curr,0 , entry,0 ) if ( val) goto restart return true } bool remove(int key) { Entry *pred,*curr,*r restart: locate(pred,curr,key) k = (curr->key ≠ key) if (k) return false = curr->next lval=CAS(&curr->next, r,m , r,1 ) if ( lval) goto restart pval=CAS(&pred- >next, curr,0 , r,0 ) if ( pval) goto restart return true } Sequential to Highly Concurrent Sets bool add(int key){ atomic Entry *pred,*curr,*entry locate(pred,curr,key); k = (curr->key == key) if (k) return false entry = new Entry() entry->next = curr pred->next = entry return true } bool remove(int key){ atomic Entry *pred,*curr,*r locate(pred,curr,key) k = (curr->key ≠ key) if (k) return false r = curr->next pred->next = r return true }
 { Entry *pred,*curr,*entry restart: locate(pred,curr,key) k = (curr->key == key) if (k) return false entry = new Entry() entry->next = curr val=CAS(&pred- >next, curr,0 , entry,0 ) if ( val) goto restart return true } bool remove(int key) { Entry *pred,*curr,*r restart: locate(pred,curr,key) k = (curr->key ≠ key) if (k) return false = curr->next lval=CAS(&curr->next, r,m , r,1 ) if ( lval) goto restart pval=CAS(&pred- >next, curr,0 , r,0 ) if ( pval) goto restart return true } Sequential to Highly Concurrent Sets bool add(int key){ atomic Entry *pred,*curr,*entry locate(pred,curr,key); k = (curr->key == key) if (k) return false entry = new Entry() entry->next = curr pred->next = entry return true } bool remove(int key){ atomic Entry *pred,*curr,*r locate(pred,curr,key) k = (curr->key ≠ key) if (k) return false r = curr->next pred->next = r return true }")
15
Generate - Verify Generator Verifier Schema Specification Abstraction Program Yes/No, Counterexample Set Of Optimal Programs

16
Generator: Domain Specific Search less atomic more atomic

17
Generate-Verify

18
Atomicity Reduction: Steps Removing redundant atomicity Reordering statements Optimistic concurrency Add synchronization meta-data 18 s1 s2 s3 s4 s1 s2 s3 s4 If (validate) update else restart read s1 s2 s3 s4 s2 s1 s3 s4 s3 s4 read update s1 s2 s1 If (t > 0) s2 s3 s4
 update else restart read s1 s2 s3 s4 s2 s1 s3 s4 s3 s4 read update s1 s2 s1 If (t > 0) s2 s3 s4")
19
19 Concurrent Sets: Generate-Check Schema Correct Algorithm DCAS Sequential DCAS CAS with LOCKS Priority Queue Stack CAS/DCAS … … Michael (PODC’02) Heller et al. (OPODIS’05) Trieber Stack Existing Algorithm New Algorithm
 Trieber Stack Existing Algorithm New Algorithm.")
20
locate(pred,curr,key) 20 Step 1: Optimistic Concurrency [Kung & Robinson’81] bool remove(int key){ Entry *pred,*curr,*r atomic locate(pred,curr,key) k = (curr->key ≠ key) if (k) return false r = curr->next pred->next = r return true } bool remove(int key){ Entry *pred,*curr,*r restart: Read atomic if ( validate ) { Update } goto restart } k = (curr->key ≠ key) if (k) return false r = curr->next pred->next = r return true Update Read
![locate(pred,curr,key) 20 Step 1: Optimistic Concurrency [Kung & Robinson’81] bool remove(int key){ Entry *pred,*curr,*r atomic locate(pred,curr,key) k = (curr->key ≠ key) if (k) return false r = curr->next pred->next = r return true } bool remove(int key){ Entry *pred,*curr,*r restart: Read atomic if ( validate ) { Update } goto restart } k = (curr->key ≠ key) if (k) return false r = curr->next pred->next = r return true Update Read](http://images.slideplayer.com/26/8339069/slides/slide_20.jpg "locate(pred,curr,key) 20 Step 1: Optimistic Concurrency [Kung & Robinson’81] bool remove(int key){ Entry *pred,*curr,*r atomic locate(pred,curr,key) k = (curr->key ≠ key) if (k) return false r = curr->next pred->next = r return true } bool remove(int key){ Entry *pred,*curr,*r restart: Read atomic if ( validate ) { Update } goto restart } k = (curr->key ≠ key) if (k) return false r = curr->next pred->next = r return true Update Read")
21
Step 2: Generate-Check 21 Generate-Check No correct completion found Insufficient information to write a validation condition bool remove(int key){ Entry *pred,*curr,*r locate(pred,curr,key) atomic if (validate) { k = (curr->key ≠ key) if (k) return false r = curr->next pred->next = r return true } goto restart } truepred->next == currpred == curr ( (pred | curr) (->next)? == (pred | curr) (->next)? ) | true
 (->next). ) | true.")
22
Step 2: Counterexample 22 -- 159 head tail predcurr r predcurr T1: remove(5) T2: add(7) ||
 T2: add(7) ||")
23
Step 2: Counterexample 23 -- 159 head tail pred curr T1: remove(5) T2: add(7) || 7 How to deal with removed nodes?
 T2: add(7) || 7 How to deal with removed nodes")
24
Dealing with Removed Nodes? Observability (Meta-Data) Synchronization Time 24
 Synchronization Time 24")
25
25 Step 3: Apply Transformation keynextkeynext marked REMOVE = { R1: k = (curr->key ≠ key) R2: if (k) return false R3: curr->marked = true R4: mp = pred->marked R5: mc = curr->marked R6: val= (pred->next == curr) ( mp)? ( mc)? R7: if ( val) goto restart R8: r = curr->next R9: pred->next = r } OBJECT
. R7: if ( val) goto restart R8: r = curr->next R9: pred->next = r } OBJECT.")
26
Step 4: Run Generate-Verify 26 bool remove(int key) { Entry *pred,*curr,*r restart: locate(pred,curr,key) REMOVE return true } REMOVE = { R1: k = (curr->key ≠ key) R2: if (k) return false R3: curr->marked = true R4: mp = pred->marked R5: mc = curr->marked R6: val= (pred->next == curr) ? ( mp) ? ( mc) R7: if ( val) goto restart R8: r = curr->next R9: pred->next = r } bool remove(int key) { Entry *pred,*curr,*r restart: locate(pred,curr,key) REMOVE return true } REMOVE = { k = (curr->key ≠ key) if (k) return false curr->marked = true r = curr->next atomic mp = pred->marked val=(pred->next==curr) mp if ( val) goto restart pred->next = r } Generate- Verify
 . ( mc) R7: if ( val) goto restart R8: r = curr->next R9: pred->next = r } bool remove(int key) { Entry *pred,*curr,*r restart: locate(pred,curr,key) REMOVE return true } REMOVE = { k = (curr->key ≠ key) if (k) return false curr->marked = true r = curr->next atomic mp = pred->marked val=(pred->next==curr) mp if ( val) goto restart pred->next = r } Generate- Verify.")
27
27 -- 19 head tail predcurr r predcurr T1: remove(5) T2: add(7) || Fixed Previous Counterexample add(7) observes pred “5” is marked and restarts predcurr 5
 T2: add(7) || Fixed Previous Counterexample add(7) observes pred 5 is marked and restarts predcurr 5")
28
28 bool add(int key) { Entry *pred,*curr,*entry restart: locate(pred,curr,key) k = (curr->key == key) if (k) return false entry = new Entry() entry->next = curr val=CAS(&pred->next, curr,0 , entry,0 ) if ( val) goto restart return true } bool remove(int key) { Entry *pred,*curr,*r restart: locate(pred,curr,key) k = (curr->key ≠ key) if (k) return false = curr->next lval=CAS(&curr->next, r,m , r,1 ) if ( lval) goto restart pval=CAS(&pred->next, curr,0 , r,0 ) if ( pval) goto restart return true } Final Result bool contains(int key) { Entry *pred,*curr locate(pred,curr,key) k = (curr->key == key) if (k) return false return true }
 { Entry *pred,*curr,*entry restart: locate(pred,curr,key) k = (curr->key == key) if (k) return false entry = new Entry() entry->next = curr val=CAS(&pred->next, curr,0 , entry,0 ) if ( val) goto restart return true } bool remove(int key) { Entry *pred,*curr,*r restart: locate(pred,curr,key) k = (curr->key ≠ key) if (k) return false = curr->next lval=CAS(&curr->next, r,m , r,1 ) if ( lval) goto restart pval=CAS(&pred->next, curr,0 , r,0 ) if ( pval) goto restart return true } Final Result bool contains(int key) { Entry *pred,*curr locate(pred,curr,key) k = (curr->key == key) if (k) return false return true }")
29
Lessons Generate-Verify Shortcomings – Generate can produce programs that cannot be verified – Verifier doing redundant work Expressing insights as syntactic templates is cumbersome Concurrency inherently tied to Space

30
– Enable automatic verification to do inference Verification: no longer only a yes/no answer – Input: A (possibly incorrect) concurrent program – Output: A set of programs (possibly empty set) Verification-Driven Synthesis
 concurrent program – Output: A set of programs (possibly empty set) Verification-Driven Synthesis")
31
31 Plan Motivation Case Study: Concurrent Data Structures Hoare’s CCR Finite State Abstract Interpretation Based Synthesis Memory Fences (Optional)
")
32
High Level Setting 32 Process 1Process 2Process 3

33
High Level Setting 33 Process 1Process 2Process 3

34
High Level Setting 34 Process 1Process 2Process 3

35
High Level Setting 35 Process 1Process 2Process 3

36
Challenge 36 Process 1Process 2Process 3 How to synchronize processes in order to achieve correctness and good performance ?

37
Semaphores Monitors Conditional critical region (CCR) Fine grained (e.g., CAS) Atomics.... Synchronization Primitives 37

38
Conditional Critical Regions Syntax of CCR Synchronization code – guard can observe the program state – guard does not modify program state guard stmt 38

39
High Level Setting 39 Process 1Process 2Process 3

40
CCR Setting 40 Process 1Process 2Process 3 s1;s2; s5; s7; s6; s3;s4; Specification: Permissiveness Cost as a language of CCR guards

41
Given a language LG, specification S and program A, program B is maximally permissive, if: – B satisfies S – B is obtained from A by adding guards from LG – Cannot obtain a program C that is correct and more permissive than B from A via LG: 41 Maximal Permissiveness if B C then C does not satisfy S

42
Two Algorithms to infer CCR guards – Greedy – Exhaustive Guarantee maximal permissiveness – Greedy: under some conditions – Exhaustive: always Implementation in SPIN – prototype, examples Contributions

43
This Work Safety, No Stuck States Specification: Language of Guards Cost: Automatic Inference of Guards Process 1Process 2Process 3 s1;s2; s5; s7; s6; s3;s4; Process 1Process 2Process 3 g1 s1;s2; s5; g2 s7; s6; s3;s4; Correct and Maximally Permissive

44
Inference Algorithm Construct transition system of input program and specification Remove a (minimal) set of transitions such that the result satisfies the specification Implement resulting transition system as program by strengthening guards of CCRs in the program 44
 set of transitions such that the result satisfies the specification Implement resulting transition system as program by strengthening guards of CCRs in the program 44")
45
GREEDY(P : Program) : Program { R = ∅ while (true) { ts = if valid(ts) return implement(P,R) B = cut-transitions(ts) if B = ∅ abort “cannot find valid synchronization” select a transition t ∈ B R = R ∪ equiv(t) } Inference Algorithm 45
 : Program { R = ∅ while (true) { ts = if valid(ts) return implement(P,R) B = cut-transitions(ts) if B = ∅ abort cannot find valid synchronization select a transition t ∈ B R = R ∪ equiv(t) } Inference Algorithm 45")
46
Example Language: Observability Obs: Variables that can be read by CCR guards LE(Obs): language of boolean combinations of equalities between variables in Obs and constants Example: Obs: {x, y, z} Guard Expression in LE(Obs): (x!=1 || y!=0 || z!=0) 46
: language of boolean combinations of equalities between variables in Obs and constants Example: Obs: {x, y, z} Guard Expression in LE(Obs): (x!=1 || y!=0 || z!=0) 46")
47
Example: Full Observability ! (y = 2 && z = 1) No Stuck States Specification: LE( { x, y, z } ) Cost: Automatic Inference of Guards z=y+1; Process 1 x=z+1; y=x+1; Process 2 Process 3
 No Stuck States Specification: LE( { x, y, z } ) Cost: Automatic Inference of Guards z=y+1; Process 1 x=z+1; y=x+1; Process 2 Process 3.")
48
What is in a state s,s,s 0,0,0 X Y Z PC1 PC2 PC3

49
Build Transition System s,s,s 0,0,0 e,s,s 1,0,0 s,e,s 0,1,0 s,s,e 0,0,1 e,e,s 1,2,0 e,s,e 1,0,1 e,e,s 1,1,0 s,e,e 0,1,2 e,s,e 2,0,1 s,e,e 0,1,1 e,e,e 1,2,3 e,e,e 1,2,1 e,e,e 1,1,2 e,e,e 3,1,2 e,e,e, 2,3,1 e,e,e 2,1,1 x=z+1 y=x+1 z=y+1 y=x+1 z=y+1 x=z+1 z=y+1 x=z+1 y=x+1 49

50
Select Transitions to Remove s,s,s 0,0,0 e,s,s 1,0,0 s,e,s 0,1,0 s,s,e 0,0,1 e,e,s 1,2,0 e,s,e 1,0,1 e,e,s 1,1,0 s,e,e 0,1,2 e,s,e 2,0,1 s,e,e 0,1,1 e,e,e 1,2,3 e,e,e 1,2,1 e,e,e 1,1,2 e,e,e 3,1,2 e,e,e, 2,3,1 e,e,e 2,1,1 x=z+1 y=x+1 z=y+1 y=x+1 z=y+1 x=z+1 z=y+1 x=z+1 y=x+1 50

51
s,s,s 0,0,0 e,s,s 1,0,0 s,e,s 0,1,0 s,s,e 0,0,1 e,e,s 1,2,0 e,e,s 1,1,0 s,e,e 0,1,2 e,s,e 2,0,1 s,e,e 0,1,1 e,e,e 1,2,3 e,e,e 1,1,2 e,e,e 3,1,2 e,e,e, 2,3,1 e,e,e 2,1,1 x=z+1 y=x+1 z=y+1 y=x+1 z=y+1 x=z+1 z=y+1 x=z+1 y=x+1 51 e,s,e 1,0,1 e,e,e 1,2,1 y=x+1 z=y+1 Build Transition System x!=1 || y!=0 || z!=0 Correct and Maximally Permissive

52
Example: Full Observability ! (y = 2 && z = 1) No Stuck States Specification: LE( { x, y, z } ) Cost: Automatic Inference of Guards z=y+1; Process 1 x=z+1; y=x+1; Process 2 Process 3 (x!=1 || y!=0 || z!=0) z=y+1; Process 1 x=z+1; y=x+1; Process 2 Process 3
 No Stuck States Specification: LE( { x, y, z } ) Cost: Automatic Inference of Guards z=y+1; Process 1 x=z+1; y=x+1; Process 2 Process 3 (x!=1 || y!=0 || z!=0) z=y+1; Process 1 x=z+1; y=x+1; Process 2 Process 3.")
53
Example: Limited Observability ! (y = 2 && z = 1) No Stuck States Specification: LE( { x,, z } ) Cost: Automatic Inference of Guards z=y+1; Process 1 x=z+1; y=x+1; Process 2 Process 3
 No Stuck States Specification: LE( { x,, z } ) Cost: Automatic Inference of Guards z=y+1; Process 1 x=z+1; y=x+1; Process 2 Process 3.")
54
s,s,s 0,0,0 e,s,s 1,0,0 s,e,s 0,1,0 s,s,e 0,0,1 e,e,s 1,2,0 e,s,e 1,0,1 e,e,s 1,1,0 s,e,e 0,1,2 e,s,e 2,0,1 s,e,e 0,1,1 e,e,e 1,2,3 e,e,e 1,2,1 e,e,e 1,1,2 e,e,e 3,1,2 e,e,e, 2,3,1 e,e,e 2,1,1 x=z+1 y=x+1 z=y+1 y=x+1 z=y+1 x=z+1 z=y+1 x=z+1 y=x+1 54 Build Transition System

55
s,s,s 0,0,0 e,s,s 1,0,0 s,e,s 0,1,0 s,s,e 0,0,1 e,e,s 1,2,0 e,s,e 1,0,1 e,e,s 1,1,0 s,e,e 0,1,2 e,s,e 2,0,1 s,e,e 0,1,1 e,e,e 1,2,3 e,e,e 1,2,1 e,e,e 1,1,2 e,e,e 3,1,2 e,e,e, 2,3,1 e,e,e 2,1,1 x=z+1 y=x+1 z=y+1 y=x+1 z=y+1 x=z+1 z=y+1 x=z+1 y=x+1 55

56
Select transition to remove s,s,s 0,0,0 e,s,s 1,0,0 s,e,s 0,1,0 s,s,e 0,0,1 e,e,s 1,2,0 e,s,e 1,0,1 e,e,s 1,1,0 s,e,e 0,1,2 e,s,e 2,0,1 s,e,e 0,1,1 e,e,e 1,2,3 e,e,e 1,2,1 e,e,e 1,1,2 e,e,e 3,1,2 e,e,e, 2,3,1 e,e,e 2,1,1 x=z+1 y=x+1 z=y+1 y=x+1 z=y+1 x=z+1 z=y+1 x=z+1 y=x+1 56

57
s,s,s 0,0,0 e,s,s 1,0,0 s,e,s 0,1,0 s,s,e 0,0,1 e,e,s 1,2,0 e,s,e 1,0,1 e,e,s 1,1,0 s,e,e 0,1,2 e,s,e 2,0,1 s,e,e 0,1,1 e,e,e 1,2,3 e,e,e 1,2,1 e,e,e 1,1,2 e,e,e 3,1,2 e,e,e, 2,3,1 e,e,e 2,1,1 x=z+1 y=x+1 z=y+1 y=x+1 z=y+1 x=z+1 z=y+1 x=z+1 y=x+1 57 Select All Equivalent Transitions Implementability

58
s,s,s 0,0,0 e,s,s 1,0,0 s,e,s 0,1,0 s,s,e 0,0,1 s,e,e 0,1,2 e,s,e 2,0,1 s,e,e 0,1,1 e,e,e 3,1,2 e,e,e, 2,3,1 e,e,e 2,1,1 x=z+1 y=x+1 z=y+1 y=x+1 x=z+1 z=y+1 x=z+1 y=x+1 58 Stuck states e,e,s 1,2,0 e,s,e 1,0,1 e,e,s 1,1,0 e,e,e 1,2,3 e,e,e 1,2,1 e,e,e 1,1,2 y=x+1 z=y+1 x!=1 || z!=0 z=y+1 x!=1 || z!=0 Build Transition System

59
s,s,s 0,0,0 e,s,s 1,0,0 s,e,s 0,1,0 s,s,e 0,0,1 s,e,e 0,1,2 e,s,e 2,0,1 s,e,e 0,1,1 e,e,e 3,1,2 e,e,e, 2,3,1 e,e,e 2,1,1 x=z+1 y=x+1 z=y+1 y=x+1 x=z+1 z=y+1 x=z+1 y=x+1 59 e,e,s 1,2,0 e,s,e 1,0,1 e,e,s 1,1,0 e,e,e 1,2,3 e,e,e 1,2,1 e,e,e 1,1,2 y=x+1 z=y+1 x!=1 || z!=0 z=y+1 x!=1 || z!=0 Select transitions to remove

60
s,s,s 0,0,0 e,s,s 1,0,0 s,e,s 0,1,0 s,s,e 0,0,1 e,e,3 1,2,0 e,2,e 1,0,1 e,e,3 1,1,0 s,e,e 0,1,2 e,s,e 2,0,1 s,e,e 0,1,1 e,e,e 1,2,3 e,e,e 1,2,1 e,e,e 1,1,2 e,e,e 3,1,2 e,e,e, 2,3,1 e,e,e 2,1,1 x=z+1 y=x+1 z=y+1 y=x+1 z=y+1 x=z+1 z=y+1 x=z+1 y=x+1 x!=1 || z!=0 x!=0 || z!=0 x!=1 || z!=0 x!=0|| z!=0 60 Build Transition System Correct and Maximally Permissive

61
Example: Limited Observability Automatic Inference of Guards (x!=1 || z!=0) z=y+1; Process 1 (x!=0 || z!=0) x=z+1; y=x+1; Process 2 Process 3 z=y+1; Process 1 x=z+1; y=x+1; Process 2 Process 3 ! (y = 2 && z = 1) No Stuck States Specification: LE( { x,, z } ) Cost:
 No Stuck States Specification: LE( { x,, z } ) Cost:.")
62
Inference Algorithms Greedy algorithm – Resulting program satisfies the specification – No side-effects guarantees maximal permissiveness – Experience: maximally permissive with side-effects – Polynomial Exhaustive algorithm – Resulting program satisfies the specification – Maximally permissive – Exponential 62

63
Implementation Prototype – Greedy algorithm – Using SPIN Examples – Dining philosophers – Asynchronous counters – Race correction 63

64
Summary Algorithms for CCR guard inference – Greedy (polynomial) and Exhaustive (exponential) – Produce maximally permissive programs – Parametric on User-specified Cost – Deals with side effects and implementability 64
 and Exhaustive (exponential) – Produce maximally permissive programs – Parametric on User-specified Cost – Deals with side effects and implementability 64")
65
Future Work Conditions for maximal permissiveness of greedy Infer other synchronization mechanisms – meta-data, atomic sections, non-blocking Abstraction for stuck states 65

66
66 Plan Motivation Case Study: Concurrent Data Structures Hoare’s CCR Finite State Abstract Interpretation Based Synthesis Memory Fences (Optional)
")
67
Crash Course on Abstract Interpretation Verify that property holds on all executions Challenge: programs with unbounded state bad news: problem is undecidable good news: can use over-approximation – Consider a superset of possible executions – sound: a yes is a yes! – incomplete: a no is a maybe … 67

68
Verification Challenge main(int i) { int x=3,y=1; do { y = y + 1; } while(--i > 0) assert 0 < x + y } Determine what states can arise during any execution Challenge: set of states is unbounded 68
 { int x=3,y=1; do { y = y + 1; } while(--i > 0) assert 0 < x + y } Determine what states can arise during any execution Challenge: set of states is unbounded 68")
69
Abstract Interpretation Recipe 1)Abstraction 2)Transformers 3)Exploration main(int i) { int x=3,y=1; do { y = y + 1; } while(--i > 0) assert 0 < x + y } Challenge: set of states is unbounded Solution: compute a bounded representation of (a superset) of program states Determine what states can arise during any execution 69
Abstraction 2)Transformers 3)Exploration main(int i) { int x=3,y=1; do { y = y + 1; } while(--i > 0) assert 0 < x + y } Challenge: set of states is unbounded Solution: compute a bounded representation of (a superset) of program states Determine what states can arise during any execution 69")
70
1) Abstraction concrete state abstract state main(int i) { int x=3,y=1; do { y = y + 1; } while(--i > 0) assert 0 < x + y } : Var Z # : Var {+, 0, -, ?} xyi 31 7 xyi ++ + 32 6 xyi … 70
 Abstraction concrete state abstract state main(int i) { int x=3,y=1; do { y = y + 1; } while(--i > 0) assert 0 < x + y } : Var Z # : Var {+, 0, -, } xyi 31 7 xyi xyi … 70")
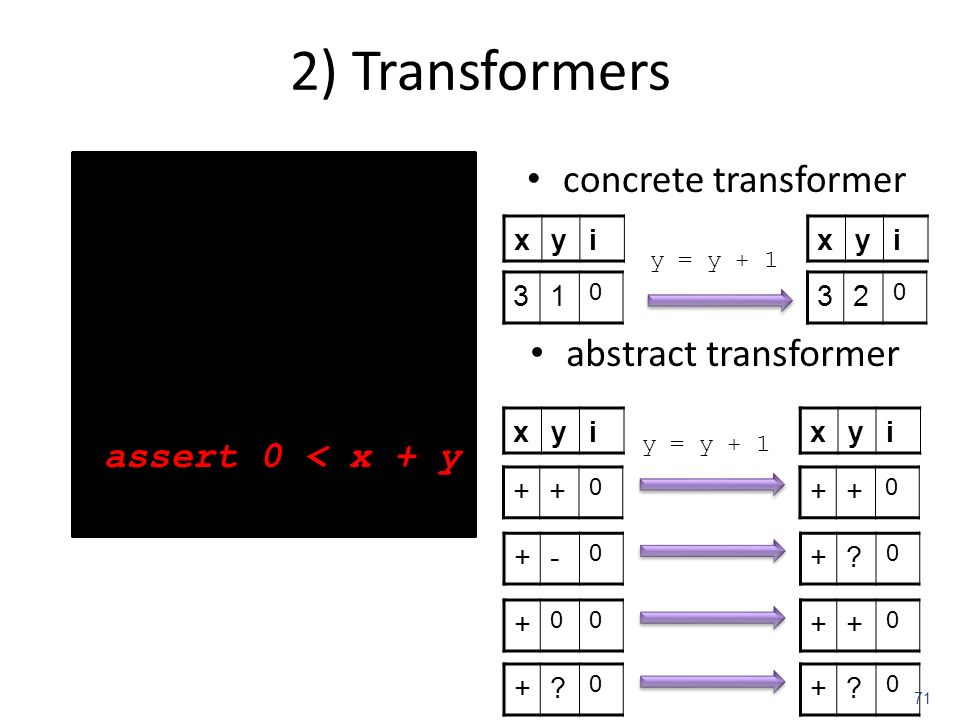
71
2) Transformers concrete transformer abstract transformer main(int i) { int x=3,y=1; do { y = y + 1; } while(--i > 0) assert 0 < x + y } xyi ++ 0 xyi 31 0 y = y + 1 xyi 32 0 xyi ++ 0 +- 0 +? 0 + 00 ++ 0 +? 0 +? 0 71
72
3) Exploration ++ ? ++ ? xyi main(int i) { int x=3,y=1; do { y = y + 1; } while(--i > 0) assert 0 < x + y } ++ ? ++ ? ?? ? xyi ++ ? ++ ? ++ ? ++ ? ++ ? ++ ? 72
 { int x=3,y=1; do { y = y + 1; } while(--i > 0) assert 0 < x + y } xyi")
73
Incompleteness main(int i) { int x=3,y=1; do { y = y - 2; y = y + 3; } while(--i > 0) assert 0 < x + y } +? ? +? ? xyi +? ? ++ ? ?? ? xyi +? ? +? ? +? ? 73

74
Concurrent Program Specification Abstraction Abstract Interpreter Refine Counter Example Change the abstraction to match the program Automatic Verification with Abstraction

75
Concurrent Program Specification Abstraction Abstract Interpreter Refine Counter Example Restrict the program to match the abstraction Avoid Counter Example Program Automatic Construction with Abstraction

76
AGS Algorithm – High Level = true while(true) { Traces = { | ( P ) and S} if (Traces is empty) return implement(P, ) select Traces if (?) { = avoid( ) } else { = refine( , ) } Input: Program P, Specification S, Abstraction Output: Program P’ satisfying S under
 { Traces = { | ( P ) and S} if (Traces is empty) return implement(P, ) select Traces if ( ) { = avoid( ) } else { = refine( , ) } Input: Program P, Specification S, Abstraction Output: Program P’ satisfying S under ")
77
Trace Avoidance: avoid( ) :: Thread A A1 A2 Thread B B1 B2 Atomicity predicate [ st1, st2 ] disables a context switch avoid( ) – disjunction of all possible atomicity predicates that would prevent A1 A2 B1 B2 avoid( ) = [A 1,A 2 ] [B 1,B 2 ]
![Trace Avoidance: avoid( ) :: Thread A A1 A2 Thread B B1 B2 Atomicity predicate [ st1, st2 ] disables a context switch avoid( ) – disjunction of all possible atomicity predicates that would prevent A1 A2 B1 B2 avoid( ) = [A 1,A 2 ] [B 1,B 2 ]](http://images.slideplayer.com/26/8339069/slides/slide_77.jpg "Trace Avoidance: avoid( ) :: Thread A A1 A2 Thread B B1 B2 Atomicity predicate [ st1, st2 ] disables a context switch avoid( ) – disjunction of all possible atomicity predicates that would prevent A1 A2 B1 B2 avoid( ) = [A 1,A 2 ] [B 1,B 2 ]")
78
Example T1 1: x += z 2: x += z T2 1: z++ 2: z++ T3 1: y1 = f(x) 2: y2 = x 3: assert(y1 != y2) f(x) { if (x == 1) return 3 else if (x == 2) return 6 else return 5 } How to place synchronization to achieve correctness and performance?
 2: y2 = x 3: assert(y1 != y2) f(x) { if (x == 1) return 3 else if (x == 2) return 6 else return 5 } How to place synchronization to achieve correctness and performance")
79
Example: Parity Abstraction 023 1 2 3 4 5 4 6 y2 y1 1 Concrete values 023 1 2 3 4 5 4 6 y2 y1 1 Parity abstraction (even/odd)
")
80
avoid( 1 ) = [z++,z++] = [z++,z++] = true while(true) { Traces={ | ( P ) and S } if (Traces is empty) return implement(P, ) select Traces if (?) { = avoid( ) } else { = refine( , ) } Example: Avoiding Bad Traces
![avoid( 1 ) = [z++,z++] = [z++,z++] = true while(true) { Traces={ | ( P ) and S } if (Traces is empty) return implement(P, ) select Traces if ( ) { = avoid( ) } else { = refine( , ) } Example: Avoiding Bad Traces](http://images.slideplayer.com/26/8339069/slides/slide_80.jpg "avoid( 1 ) = [z++,z++] = [z++,z++] = true while(true) { Traces={ | ( P ) and S } if (Traces is empty) return implement(P, ) select Traces if ( ) { = avoid( ) } else { = refine( , ) } Example: Avoiding Bad Traces")
81
avoid( 2 ) =[x+=z,x+=z] = [z++,z++] = [z++,z++] [x+=z,x+=z] = true while(true) { Traces={ | ( P ) and S } if (Traces is empty) return implement(P, ) select Traces if (?) { = avoid( ) } else { = refine( , ) } Example: Avoiding Bad Traces
![avoid( 2 ) =[x+=z,x+=z] = [z++,z++] = [z++,z++] [x+=z,x+=z] = true while(true) { Traces={ | ( P ) and S } if (Traces is empty) return implement(P, ) select Traces if ( ) { = avoid( ) } else { = refine( , ) } Example: Avoiding Bad Traces](http://images.slideplayer.com/26/8339069/slides/slide_81.jpg "avoid( 2 ) =[x+=z,x+=z] = [z++,z++] = [z++,z++] [x+=z,x+=z] = true while(true) { Traces={ | ( P ) and S } if (Traces is empty) return implement(P, ) select Traces if ( ) { = avoid( ) } else { = refine( , ) } Example: Avoiding Bad Traces")
82
T1 1: x += z 2: x += z T2 1: z++ 2: z++ T3 1: y1 = f(x) 2: y2 = x 3: assert(y1 != y2) = [z++,z++] [x+=z,x+=z] = true while(true) { Traces={ | ( P ) and S } if (Traces is empty) return implement(P, ) select Traces if (?) { = avoid( ) } else { = refine( , ) } Example: Avoiding Bad Traces
![T1 1: x += z 2: x += z T2 1: z++ 2: z++ T3 1: y1 = f(x) 2: y2 = x 3: assert(y1 != y2) = [z++,z++] [x+=z,x+=z] = true while(true) { Traces={ | ( P ) and S } if (Traces is empty) return implement(P, ) select Traces if ( ) { = avoid( ) } else { = refine( , ) } Example: Avoiding Bad Traces](http://images.slideplayer.com/26/8339069/slides/slide_82.jpg "T1 1: x += z 2: x += z T2 1: z++ 2: z++ T3 1: y1 = f(x) 2: y2 = x 3: assert(y1 != y2) = [z++,z++] [x+=z,x+=z] = true while(true) { Traces={ | ( P ) and S } if (Traces is empty) return implement(P, ) select Traces if ( ) { = avoid( ) } else { = refine( , ) } Example: Avoiding Bad Traces")
83
023 1 2 3 4 5 4 6 y2 y1 1 parity 0123 1 2 3 4 5 4 6 x+=z; x+=z z++; y1=f(x) y2=x assert y1!= y2 T1 T2 T3 x+=z; x+=z z++; y1=f(x) y2=x assert y1!= y2 T1 T2 T3 0123 1 2 3 4 5 4 6 parity x+=z; x+=z z++; y1=f(x) y2=x assert y1!= y2 T1 T2 T3 But we can also refine the abstraction… Example: Avoiding Bad Traces
 y2=x assert y1!= y2 T1 T2 T3 x+=z; x+=z z++; y1=f(x) y2=x assert y1!= y2 T1 T2 T parity x+=z; x+=z z++; y1=f(x) y2=x assert y1!= y2 T1 T2 T3 But we can also refine the abstraction… Example: Avoiding Bad Traces")
84
023 1 2 3 4 5 4 6 y2 y1 1 0123 1 2 3 4 5 4 6 0123 1 2 3 4 5 4 6 parity interval octagon 0123 1 2 3 4 5 4 6 0123 1 2 3 4 5 4 6 0123 1 2 3 4 5 4 6 0123 1 2 3 4 5 4 6 (a)(b) (c) (d)(e) (f)(g) parity interval octagon x+=z; x+=z z++; y1=f(x) y2=x assert y1!= y2 T1 T2 T3 x+=z; x+=z z++; y1=f(x) y2=x assert y1!= y2 T1 T2 T3 x+=z; x+=z z++; y1=f(x) y2=x assert y1!= y2 T1 T2 T3 x+=z; x+=z z++; y1=f(x) y2=x assert y1!= y2 T1 T2 T3 x+=z; x+=z z++; y1=f(x) y2=x assert y1!= y2 T1 T2 T3 x+=z; x+=z z++; y1=f(x) y2=x assert y1!= y2 T1 T2 T3 x+=z; x+=z z++; y1=f(x) y2=x assert y1!= y2 T1 T2 T3
(b) (c) (d)(e) (f)(g) parity interval octagon x+=z; x+=z z++; y1=f(x) y2=x assert y1!= y2 T1 T2 T3 x+=z; x+=z z++; y1=f(x) y2=x assert y1!= y2 T1 T2 T3 x+=z; x+=z z++; y1=f(x) y2=x assert y1!= y2 T1 T2 T3 x+=z; x+=z z++; y1=f(x) y2=x assert y1!= y2 T1 T2 T3 x+=z; x+=z z++; y1=f(x) y2=x assert y1!= y2 T1 T2 T3 x+=z; x+=z z++; y1=f(x) y2=x assert y1!= y2 T1 T2 T3 x+=z; x+=z z++; y1=f(x) y2=x assert y1!= y2 T1 T2 T3")
85
Choosing a solution Interval abstraction for our example: ([x+=z,x+=z] ∨ [z++,z++]) ∧ ([y1=f(x),y2=x] ∨ [x+=z,x+=z] ∨ [z++,z++]) Minimal satisfying assignments – 1 = [z++, z++] – 2 = [x+=z, x+=z] Different Quantitative Notions: – Example: preference to solutions with fewer write operations inside atomic sections
![Choosing a solution Interval abstraction for our example: ([x+=z,x+=z] ∨ [z++,z++]) ∧ ([y1=f(x),y2=x] ∨ [x+=z,x+=z] ∨ [z++,z++]) Minimal satisfying assignments – 1 = [z++, z++] – 2 = [x+=z, x+=z] Different Quantitative Notions: – Example: preference to solutions with fewer write operations inside atomic sections](http://images.slideplayer.com/26/8339069/slides/slide_85.jpg "Choosing a solution Interval abstraction for our example: ([x+=z,x+=z] ∨ [z++,z++]) ∧ ([y1=f(x),y2=x] ∨ [x+=z,x+=z] ∨ [z++,z++]) Minimal satisfying assignments – 1 = [z++, z++] – 2 = [x+=z, x+=z] Different Quantitative Notions: – Example: preference to solutions with fewer write operations inside atomic sections")
86
Separation between scheduling constraints in and how they are realized Can realize in program via atomic sections Can realize in scheduler via benevolent scheduler Implementation

87
Examples ProgramRefine StepsAvoid Steps Double buffering12 Defragmentation18 3D array update223 Array Removal117 Array Init156 Simplified versions of – Double buffering – Defragmentation – …

88
Future Work Add more powerful abstractions – E.g. Heap, Polyhedra Synthesize more complex synchronization – Infer practical concurrent algorithms

89
89 Plan Motivation Case Study: Concurrent Data Structures Hoare’s CCR Finite State Abstract Interpretation Based Synthesis Memory Fences (Optional)
")
90
Results Partial-Coherence Abstractions for Weak Memory Models Kuperstein M., Vechev M., Yahav E. Submitted Automatic Inference of Memory Fences Kuperstein M., Vechev M., Yahav E. Submitted Verifying Linearizability with Hindsight O'Hearn P., Rinetzky N., Vechev M., Yahav E., Yorsh G. PODC '10: Symposium on Principles of Distributed Computing PODC '10 Abstraction-Guided Synthesis Vechev M., Yahav E., Yorsh G. POPL '10: 37th ACM SIGACT-SIGPLAN Symposium on Principles of Programming Languages POPL '10 Experience with Model Checking Linearizability Vechev M., Yahav E., Yorsh G. SPIN '09: 16th International SPIN Workshop on Model Checking of Software SPIN '09 Inferring Synchronization Under Limited Observability Vechev M., Yahav E., Yorsh G. TACAS '09: 15th International Conference on Tools and Algorithms for the Construction and Analysis of Systems TACAS '09 Deriving Linearizable Fine-Grained Concurrent Objects Vechev M., Yahav E PLDI '08: ACM SIGPLAN 2008 Conference on Programming Language Design and Implementation. PLDI '08 CGCExplorer: A Semi-Automated Search Procedure for Provably Correct Concurrent Collectors Vechev M., Yahav E., Bacon D.F., and Rinetzky N. PLDI '07: ACM SIGPLAN 2007 Conference on Programming Language Design and Implementation. PLDI '07 Correctness-Preserving Derivation of Concurrent Garbage Collection Algorithms Vechev M., Yahav E., and Bacon D.F. PLDI '06: ACM SIGPLAN 2006 Conference on Programming Language Design and Implementation. PLDI '06 90 http://www.research.ibm.com/paraglide/

91
Thanks

Similar presentations



 Challenge: Correct and Efficient Synchronization { ……………………………>")
 Challenge: Correct and Efficient Synchronization { ……………………………>")










 Joint work with Sarfraz Khurshid (MIT) and Willem Visser (RIACS)>")
 2015-04-17. 7.I Background F Producer - Consumer process : Compiler, Assembler, Loader, · · · · · · F Bounded buffer.>")
, Greta Yorsh (ARM), Michael Kuperstein (Technion), Veselin Raychev (ETH)>")

