Download presentation
Presentation is loading. Please wait.

1
Embedded Systems - Embodied Agents, Digital Control in a Physical World (Q3+4) (10 ECTS) Objectives of the course The participants will after the course have a basis for understanding embedded systems, especially robots, and practical experience with physical construction and programming of embedded systems, especially robots
 (10 ECTS) Objectives of the course The participants will after the course have a basis for understanding embedded systems, especially robots, and practical experience with physical construction and programming of embedded systems, especially robots")
2
Lectures (2 h/week), lab sessions (3 h/week) Lectures Time: Thurdays at 9.15-11.00, Location: Aud D2 first two times. Otherwise 5794-118 (Åbogade 40) Lab Sessions Location: Zuse, Åbogade 40. Class A: Time: Thurdays at 11.15-14 Class B: Time: Thurdays at 14.15-17 Course homepage http://www.legolab.cs.au.dk/
 Lab Sessions Location: Zuse, Åbogade 40. Class A: Time: Thurdays at Class B: Time: Thurdays at Course homepage")
3
LegoLab

4
Assessment methods: Project and oral exam 7-scale, internal examiner A lab notebook from each labsession is handed in each week (before the next week's labsession) in order to fulfill the compulsory programme of the course. At the end of the course each group do an end course project. Your grade for the course will be based on your lab notebook for the end course project and the oral presentation at the end of the course.

5
In the lab sessions you will work in groups of 3. After each lab session the group should hand in a lab report. After the second lab session each group should sent an e-mail to legolab with the names of the group members. To perform the activities in the lab sessions each group need LEGO Mindstorms Material. The material can be borrowed during the course. At the first lab session material will be available for handout.

6
# 9797 LEGO Mindstorms Education NXT Base Set. # UB22S USB Bluetooth Dongle # 9833 LEGO Mindstorms transformer

7
An embedded system is a special-purpose computer system designed to perform one or a few dedicated functions.

9
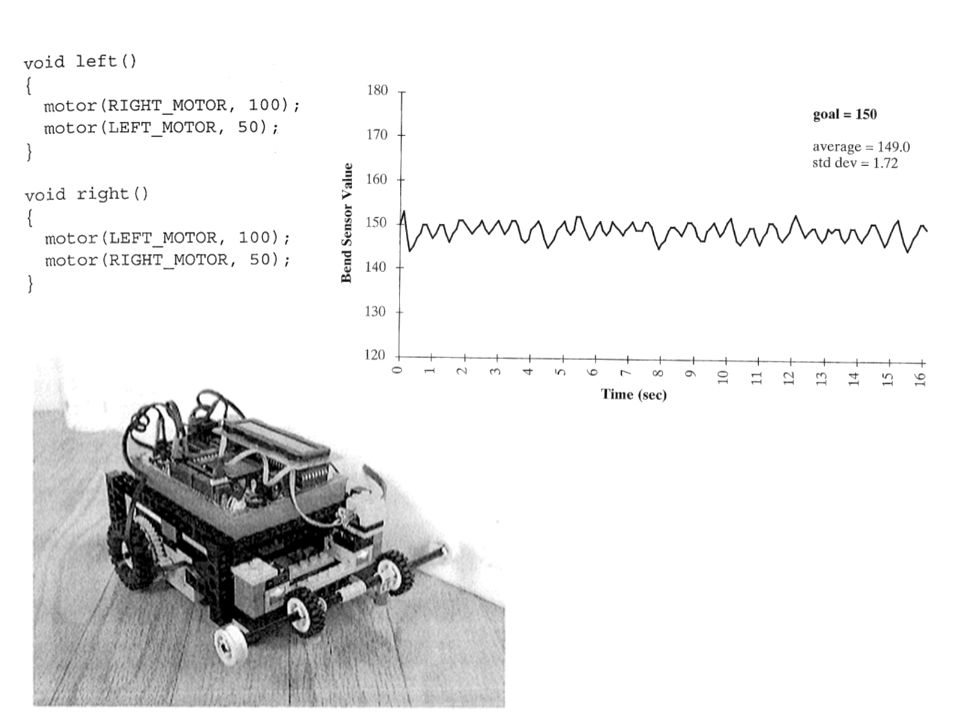
Fred Martin, Chapter 5 bend sensor wall floor HandyBug two wheels driven by two independent motors

10
right left forward bend sensor value: high value - close to wall low value - away from wall

11
Wall goal

12
right left forward

13
Close to wall Away from wall

14
wall inner outer

17
r reference value e error C controller u output from controller to control P P plant, controlled system y state of P F feedback to controller

18
LEGO® MINDSTORMS™ NXT

23
R2MeeToo

24
1 2 3

29
End course project

30
PID controller

33
legolab.cs.au.dk

Similar presentations










 University of.>")
 is made up of sixth, seventh, and eighth graders who want to participate in extra curricular activities.>")














 Objectives: 1.Extend the Lego robot with three sensors. 2.Program.>")


