Download presentation
Presentation is loading. Please wait.

1
ISC 4322/6300 – GAM 4322 Artificial Intelligence Lecture 3 Informed Search and Exploration Instructor: Alireza Tavakkoli September 10, 2009 University Of Houston- Victoria Computer Science Department

2
Uninformed Search Problem Solving Agents A sequence of actions Desirable state Definition Problem Solution Approach Uninformed search mechanisms Analysis of algorithms concepts Asymptotic complexity NP-completeness

3
Problem Solving What is a goal? A set of world states What actions to take? Level of detail Problem formulation In our example Driving to a particular town States are being in a particular town Goal Driving to Bucharest

4
Searching for Solutions Search tree Search nodes Root Initial state search node Expansion of states Applying the successor function Search Strategy

5
Comparing Search Strategies

6
Summary of Algorithms

7
Material Chapter 4 Section 1 – 3 Exclude memory-bounded heuristic search Outline Informed search strategies Greedy best-first search A * search Heuristics Local search algorithms Hill-climbing search Simulated annealing search Local beam search Genetic algorithms

8
Informed Search So far the techniques made use only of information that could be stored on a graph, i.e., the successor function Often, however, we have available problem-specific knowledge that can help. When additional information is used... we talk about “Informed Search”. How can we take advantage of such additional information? 282 538

9
Informed Search Strategies Informed search Has more knowledge beyond the problem definition Best-First Search Expand the seemingly best node Cost to the goal is minimum Evaluation function f(n) Data structure Priority queue a fringe in ascending order of f-values Heuristic function h(n) If n is the goal then h(n) = 0 Variants Greedy Best-First Search A * Algorithm
 Data structure Priority queue a fringe in ascending order of f-values Heuristic function h(n) If n is the goal then h(n) = 0 Variants Greedy Best-First Search A * Algorithm")
10
Romania w/ SLD in Km

11
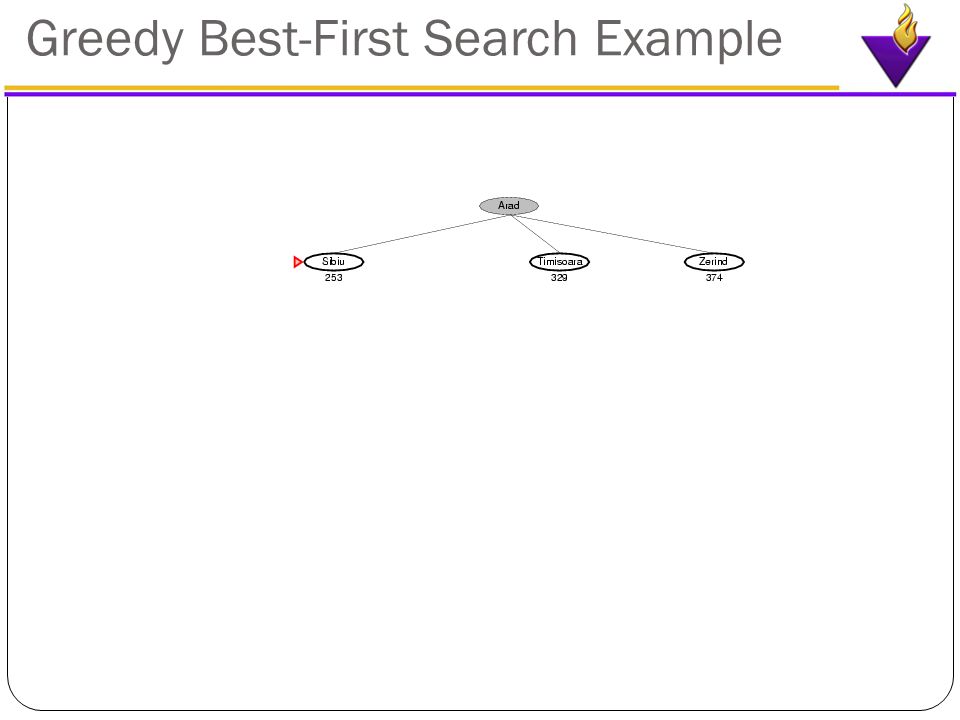
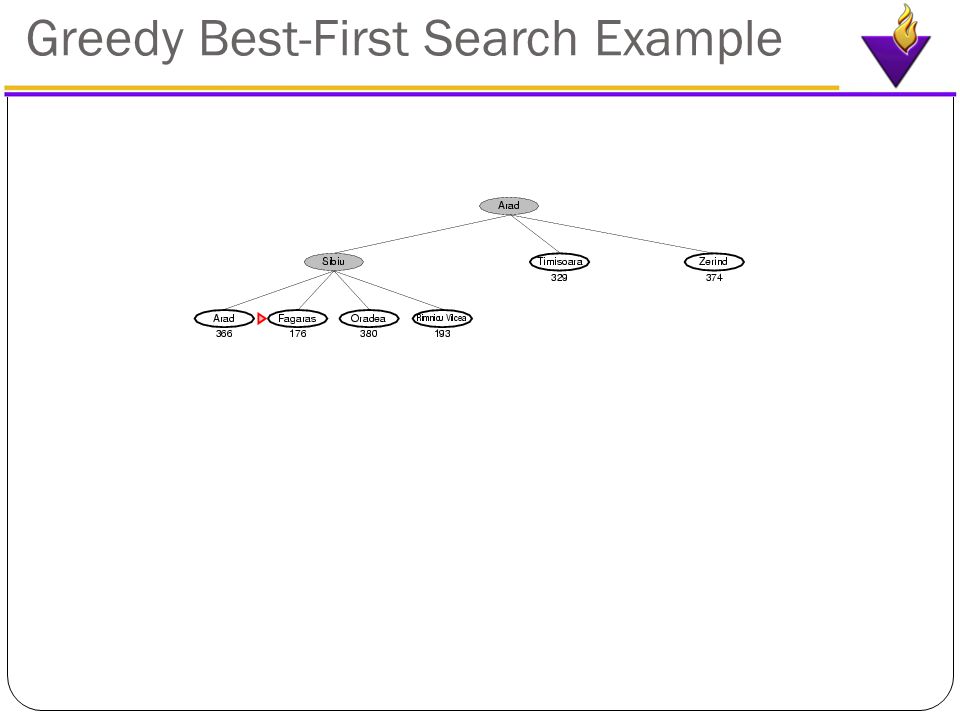
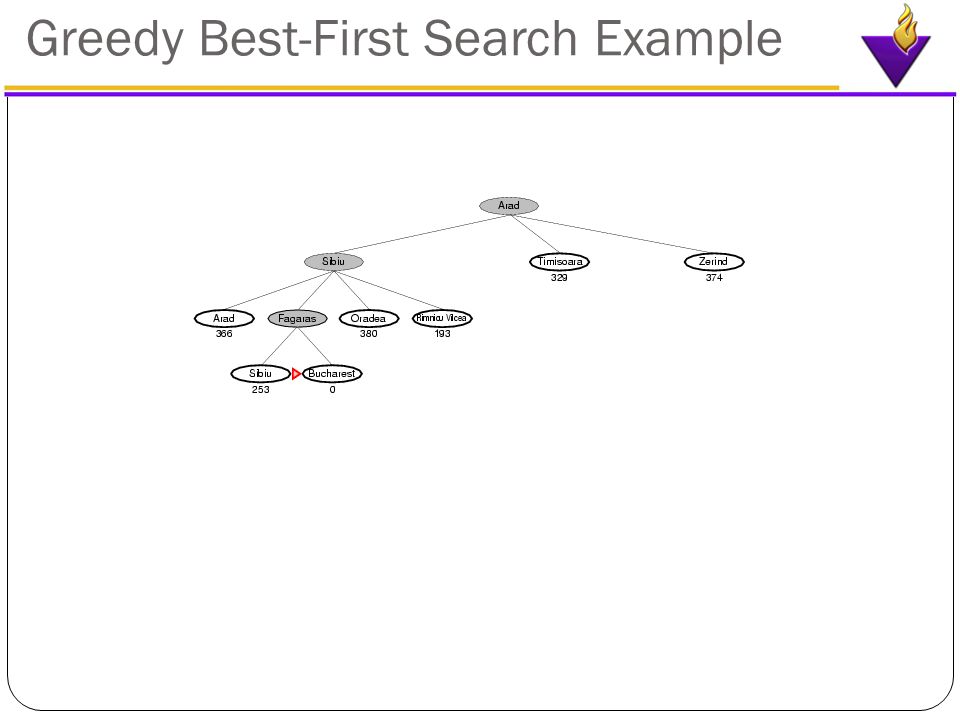
Greedy Best-First Search Greedy best-first search expands the node that appears to be closest to goal Evaluation function f(n) = h(n) (heuristic) = estimate of cost from n to goal e.g., h SLD (n) = straight-line distance from n to Bucharest The heuristic function can not be computed from the problem definition The heuristic function is relevant to the problem goal Straight line distance is likely related to the road distance
 = h(n) (heuristic) = estimate of cost from n to goal e.g., h SLD (n) = straight-line distance from n to Bucharest The heuristic function can not be computed from the problem definition The heuristic function is relevant to the problem goal Straight line distance is likely related to the road distance")
12
Greedy Best-First Search Example

16
Properties of GBFS Complete? No – can get stuck in loops e.g., Iasi Neamt Iasi Neamt Time? O(b m ) but a good heuristic can give dramatic improvement Space? O(b m ) keeps all nodes in memory Optimal? No
 but a good heuristic can give dramatic improvement Space. O(b m ) keeps all nodes in memory Optimal. No.")
17
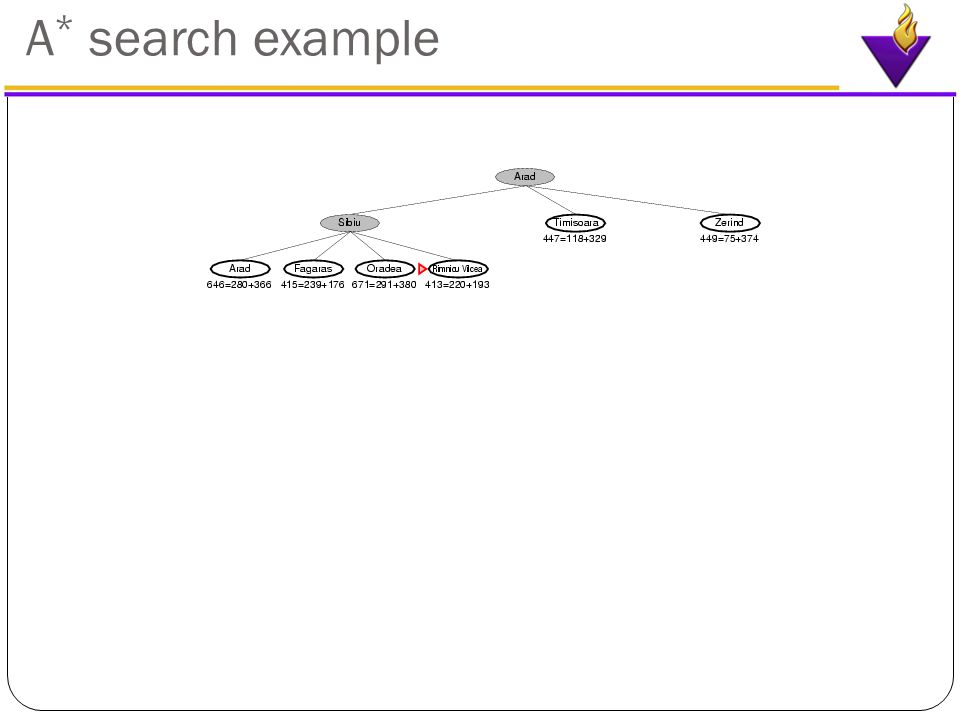
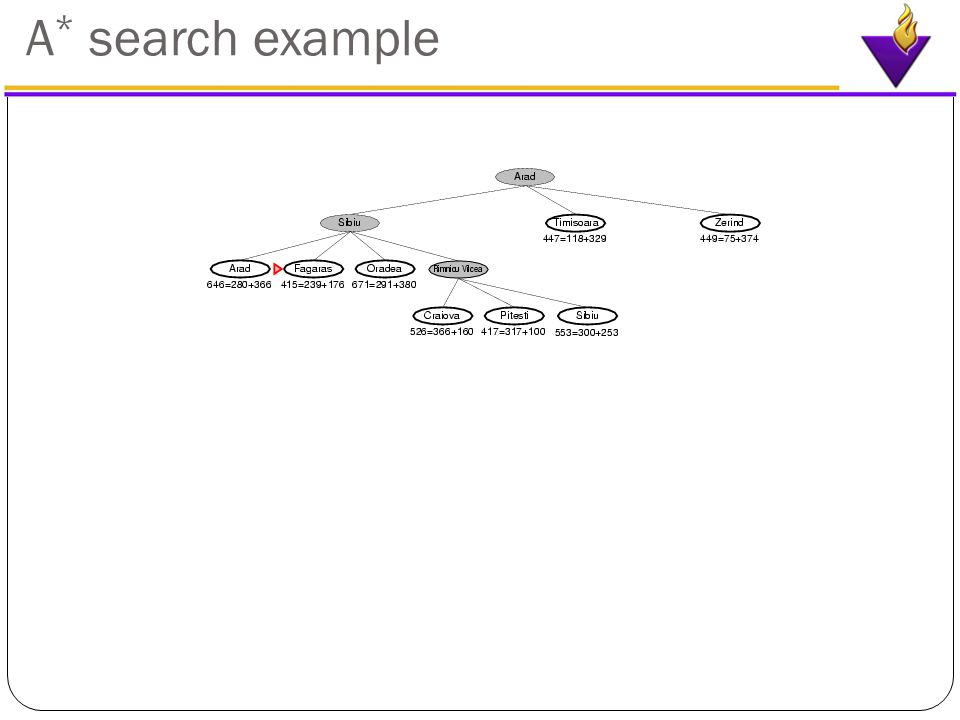
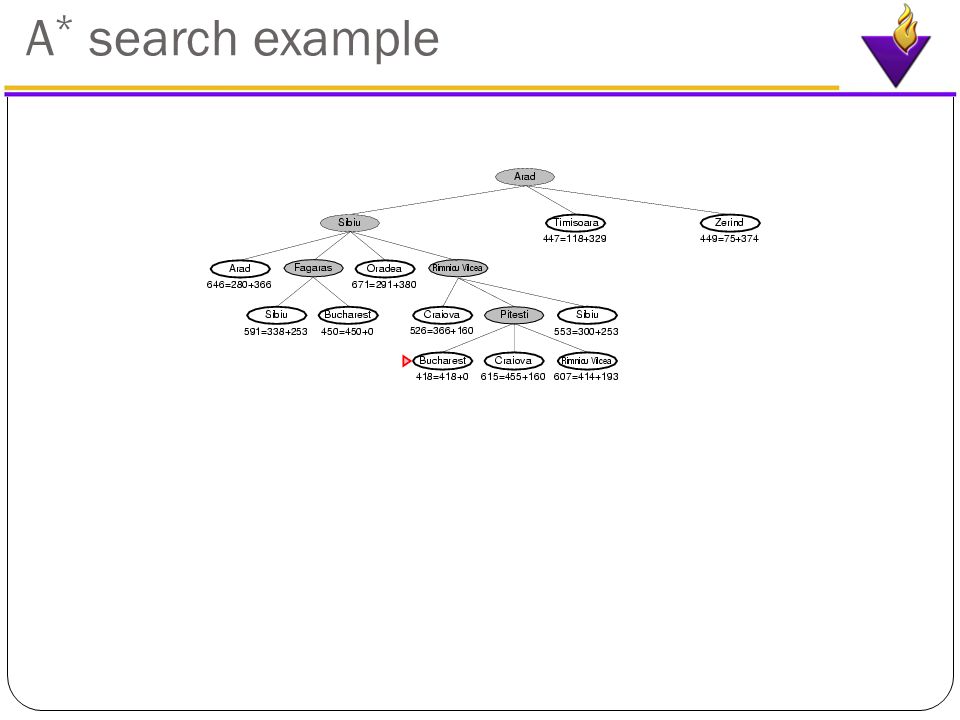
A * Search Idea: avoid expanding paths that are already expensive Evaluation function f(n) = g(n) + h(n) g(n) = cost so far to reach n h(n) = estimated cost from n to goal f(n) = estimated total cost of path through n to goal
 = g(n) + h(n) g(n) = cost so far to reach n h(n) = estimated cost from n to goal f(n) = estimated total cost of path through n to goal")
18
A * search example

24
Admissible Heuristics A heuristic h(n) is admissible if for every node n, h(n) ≤ h * (n), where h * (n) is the true cost to reach the goal state from n. An admissible heuristic never overestimates the cost to reach the goal, i.e., it is optimistic Example: h SLD (n) (never overestimates the actual road distance) Optimality Theorem: If h(n) is admissible, A * using TREE-SEARCH is optimal Tree search allows for repeated states
 (never overestimates the actual road distance) Optimality Theorem: If h(n) is admissible, A * using TREE-SEARCH is optimal Tree search allows for repeated states.")
25
Optimality of A * (proof) Suppose some suboptimal goal G 2 has been generated and is in the fringe. Let n be an unexpanded node in the fringe such that n is on a shortest path to an optimal goal G. f(G 2 ) = g(G 2 )since h(G 2 ) = 0 g(G 2 ) > g(G) since G 2 is suboptimal f(G) = g(G)since h(G) = 0 f(G 2 ) > f(G)from above
 = g(G 2 )since h(G 2 ) = 0 g(G 2 ) > g(G) since G 2 is suboptimal f(G) = g(G)since h(G) = 0 f(G 2 ) > f(G)from above.")
26
Optimality of A * (proof) Suppose some suboptimal goal G 2 has been generated and is in the fringe. Let n be an unexpanded node in the fringe such that n is on a shortest path to an optimal goal G. f(G 2 )> f(G) from above h(n)≤ h * (n)since h is admissible g(n) + h(n)≤ g(n) + h * (n) f(n) ≤ f(G) < f(G 2 ) Hence f(G 2 ) > f(n), and A * will never select G 2 for expansion
> f(G) from above h(n)≤ h * (n)since h is admissible g(n) + h(n)≤ g(n) + h * (n) f(n) ≤ f(G) < f(G 2 ) Hence f(G 2 ) > f(n), and A * will never select G 2 for expansion.")
27
A* Using Graph Search Case 2: GRAPH-SEARCH (avoid repeated states) Admissibility is not sufficient. 2 solutions to retain optimality: once you found a repeated state, discard the more expensive path (extra book- keeping, expensive) make sure the first path followed to a repeated state is the optimal path Consistency If h(n) is consistent then A* is optimal Admissible = Monotonic Satisfies the triangular inequality
 make sure the first path followed to a repeated state is the optimal path Consistency If h(n) is consistent then A* is optimal Admissible = Monotonic Satisfies the triangular inequality.")
28
Consistent heuristics A heuristic is consistent if for every node n, every successor n' of n generated by any action a, h(n) ≤ c(n,a,n') + h(n') If h is consistent, we have 1- f(n') = g(n') + h(n') 2- f(n') = g(n) + c(n,a,n') + h(n'), 3- h(n) ≤ c(n,a,n') + h(n') 4- g(n)+ c(n,a,n') + h(n') ≥ g(n) + h(n) From 2 & 4- f(n') ≥ f(n) i.e., f(n) is non-decreasing along any path. Theorem: If h(n) is consistent, A* using GRAPH-SEARCH is optimal Graph search does not allow for repeated states
 is consistent, A* using GRAPH-SEARCH is optimal Graph search does not allow for repeated states.")
29
Optimality of A * A * expands nodes in order of increasing f value Gradually adds "f-contours" of nodes Contour i has all nodes with f=f i, where f i < f i+1

30
Properties of A* Complete? Yes (unless there are infinitely many nodes with f ≤ f(G) ) Time? Exponential Space? Keeps all nodes in memory Optimal? Yes

31
Admissible Heuristics E.g., for the 8-puzzle: h 1 (n) = number of misplaced tiles h 2 (n) = total Manhattan distance (i.e., no. of squares from desired location of each tile) h 1 (S) = ? h 2 (S) = ?
 h 1 (S) = . h 2 (S) = .")
32
Admissible Heuristics E.g., for the 8-puzzle: h 1 (n) = number of misplaced tiles h 2 (n) = total Manhattan distance (i.e., no. of squares from desired location of each tile) h 1 (S) = ? 8 h 2 (S) = ? 3+1+2+2+2+3+3+2 = 18 Both heuristics are admissible.
 h 1 (S) = . 8 h 2 (S) = = 18 Both heuristics are admissible..")
33
Dominance If h 2 (n) ≥ h 1 (n) for all n (both admissible) then h 2 dominates h 1 h 2 is better for search Effective branching factor b * Good heuristics lead to b * 1 Typical search costs (average number of nodes expanded): Check table 4.8 d=12IDS = 3,644,035 nodes b * = 2.78 A * (h 1 ) = 227 nodes b * = 1.42 A * (h 2 ) = 73 nodes b * = 1.24 d=24 IDS = too many nodes b * = NA A * (h 1 ) = 39,135 nodes b * = 1.48 A * (h 2 ) = 1,641 nodes b * = 1.26
 ≥ h 1 (n) for all n (both admissible) then h 2 dominates h 1 h 2 is better for search Effective branching factor b * Good heuristics lead to b * 1 Typical search costs (average number of nodes expanded): Check table 4.8 d=12IDS = 3,644,035 nodes b * = 2.78 A * (h 1 ) = 227 nodes b * = 1.42 A * (h 2 ) = 73 nodes b * = 1.24 d=24 IDS = too many nodes b * = NA A * (h 1 ) = 39,135 nodes b * = 1.48 A * (h 2 ) = 1,641 nodes b * = 1.26")
34
Relaxed Problems A problem with fewer restrictions on the actions is called a relaxed problem The cost of an optimal solution to a relaxed problem is an admissible heuristic for the original problem “The optimal solution to the original problem is, by definition, also a solution to the relaxed problem and therefore, must be at least as expensive as the optimal solution to the relaxed problem. 8-Puzzle relaxed problems If the rules of the 8-puzzle are relaxed so that a tile can move anywhere, then h 1 (n) gives the shortest solution If the rules are relaxed so that a tile can move to any adjacent square, then h 2 (n) gives the shortest solution
 gives the shortest solution If the rules are relaxed so that a tile can move to any adjacent square, then h 2 (n) gives the shortest solution.")
35
Local Search Algorithms In many optimization problems, the path to the goal is irrelevant the goal state itself is the solution State space = set of "complete" configurations Find configuration satisfying constraints e.g., n-queens In such cases, we can use local search algorithms keep a single "current" state, try to improve it Advantages: Very little memory requirements Often find reasonable solutions in large spaces Suitable for optimization problems

36
Example: n-queens Put n queens on an n × n board with no two queens on the same row, column, or diagonal

37
Hill-climbing search State space landscape

38
Hill-climbing search "Like climbing Everest in thick fog with amnesia"

39
Hill-climbing search Problem: depending on initial state, can get stuck in local maxima

40
Hill-climbing search: 8-queens problem How many successor each state has? 56 h = number of pairs of queens that are attacking each other, either directly or indirectly h = 17 for the above state

41
Hill-climbing search: 8-queens problem Greed algorithms work well They make quick progress However They get stuck in local maxima, minima They don’t look ahead! Almost a perfect solution with h=1 Took only 5 steps from the previous Slide!

42
When does hill-climbing fail? Local maxima/minima Not found a global maxima, but the neighboring stares are even worse! Ridges All maxima are the same and everything else is worse! Plateaux All neighboring states have the same evaluation value!

43
Simulated Annealing Search Idea: escape local maxima by allowing some "bad" moves but gradually decrease their frequency

44
Properties of Simulated Annealing One can prove: If T decreases slowly enough, then simulated annealing search will find a global optimum with probability approaching 1 Widely used in VLSI layout, airline scheduling, etc

45
Local Beam Search Keep track of k states rather than just one Start with k randomly generated states At each iteration, all the successors of all k states are generated If any one is a goal state, stop; else select the k best successors from the complete list and repeat.

46
Genetic Algorithms A successor state is generated by combining two parent states Start with k randomly generated states (population) A state is represented as a string over a finite alphabet (often a string of 0s and 1s) Evaluation function (fitness function). Higher values for better states. Produce the next generation of states by selection, crossover, and mutation

47
Genetic algorithms Fitness function: number of non-attacking pairs of queens (min = 0, max = 8 × 7/2 = 28) 24/(24+23+20+11) = 31% 23/(24+23+20+11) = 29% etc
 24/( ) = 31% 23/( ) = 29% etc")
48
Genetic algorithms

49
Questions? AI: A Modern Approach : Chapter 4

Similar presentations





















>")