Download presentation
Presentation is loading. Please wait.

1
Systems of Equations and Inequalities Systems of Linear Equations: Substitution and Elimination Matrices Determinants Systems of Non-linear Equations Systems of Inequalities

2
A system of equations is a collection of two or more equations, each containing one or more variables. A solution of a system of equations consists of values for the variables that reduce each equation of the system to a true statement. To solve a system of equations means to find all solutions of the system. When a system of equations has at least one solution, it is said to be consistent; otherwise it is called inconsistent. A solution of a system of equations consists of values for the variables that reduce each equation of the system to a true statement. To solve a system of equations means to find all solutions of the system. When a system of equations has at least one solution, it is said to be consistent; otherwise it is called inconsistent.

3
An equation in n variables is said to be linear if it is equivalent to an equation of the form whereare n distinct variables, are constants, and at least one of the a’s is not zero.

4
If each equation in a system of equations is linear, then we have a system of linear equations.

5
If the graph of the lines in a system of two linear equations in two variables intersect, then the system of equations has one solution, given by the point of intersection. The system is consistent and the equations are independent. Solution y x

6
If the graph of the lines in a system of two linear equations in two variables are parallel, then the system of equations has no solution, because the lines never intersect. The system is inconsistent. x y

7
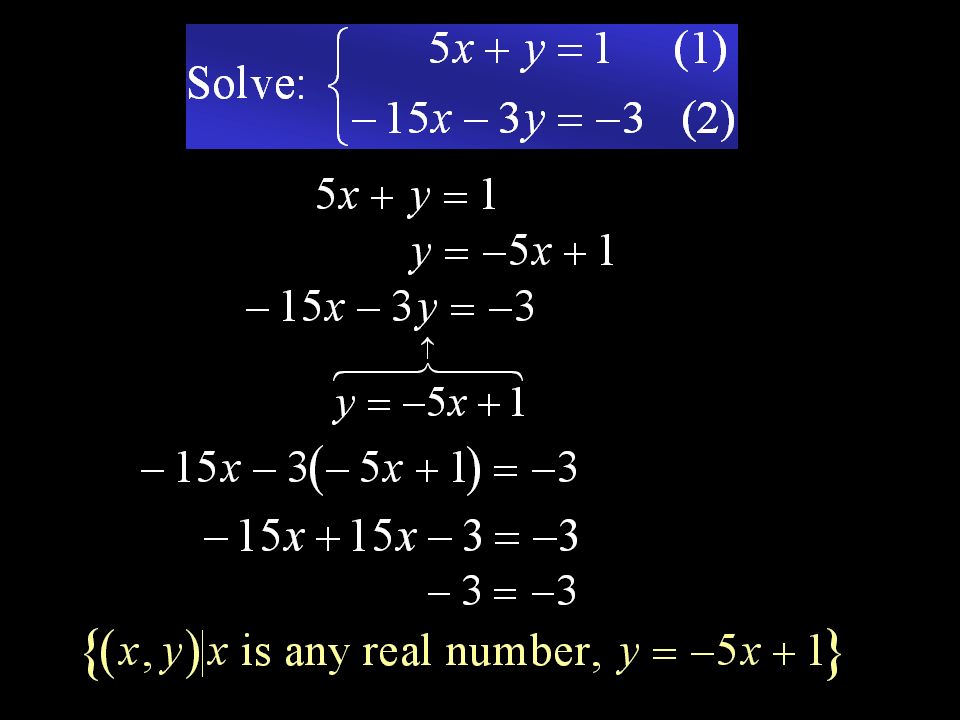
If the graph of the lines in a system of two linear equations in two variables are coincident, then the system of equations has infinitely many solutions, represented by the totality of points on the line. The system is consistent and dependent. x y

8
Two Algebraic Methods for Solving a System 1. Method of substitution 2. Method of elimination

9
STEP 1: Solve for x in (2)
")
10
STEP 2: Substitute for x in (1)
")
11
STEP 3: Solve for y

12
STEP 4: Substitute y = -4 into (2) Solution: (3, -4)
 Solution: (3, -4)")
13
STEP 5: Verify solution (1): (2):
: (2):")
15
Rules for Obtaining an Equivalent System of Equations 1. Interchange any two equations of the system. 2. Multiply (or divide) each side of an equation by the same nonzero constant. 3. Replace any equation in the system by the sum (or difference) of that equation and any other equation in the system.
 each side of an equation by the same nonzero constant. 3. Replace any equation in the system by the sum (or difference) of that equation and any other equation in the system..")
16
Multiply (1) by 3 Replace (2) by the sum of (1) and (2) Equation (2) has no solution. System is inconsistent.

18
Replace (2) by the sum of (1) and (2) Multiply (1) by -2
 by the sum of (1) and (2) Multiply (1) by -2")
19
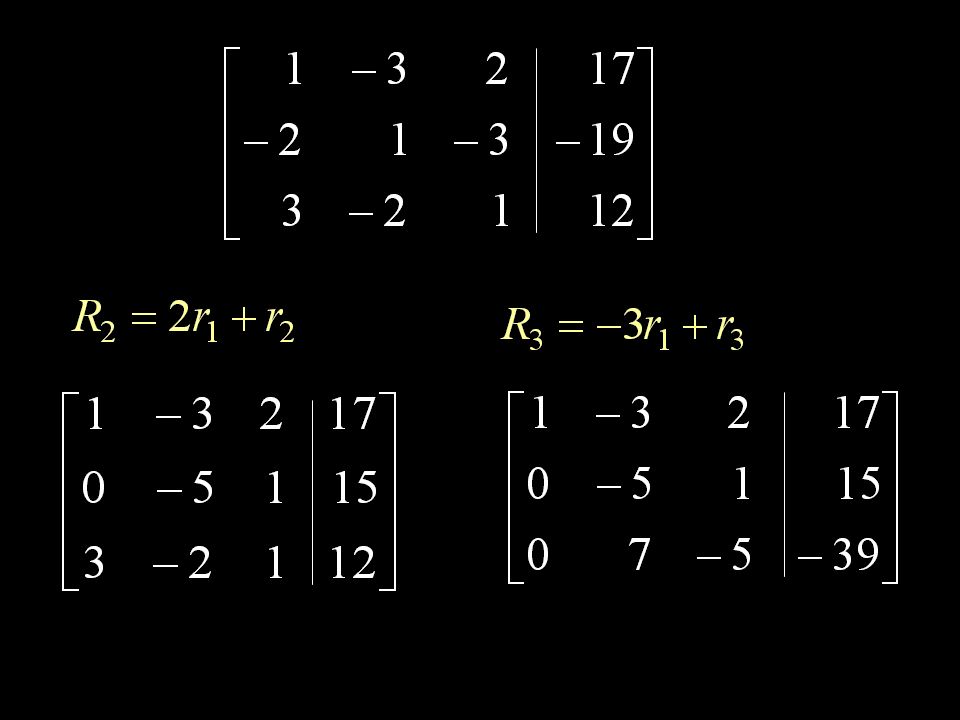
Replace (3) by the sum of (1) and (3) Multiply (2) by -2 Replace (3) by the sum of (2) and (3)
 by the sum of (1) and (3) Multiply (2) by -2 Replace (3) by the sum of (2) and (3)")
20
Multiply (3) by -1/9 Back-substitute; let z = 3 in (2) and solve for y
 by -1/9 Back-substitute; let z = 3 in (2) and solve for y")
21
Back-substitute; let y = -1 and z = 3 in (1) and solve for x. Solution: x = 2, y = -1, z = 3
 and solve for x. Solution: x = 2, y = -1, z = 3")
22
Matrix Methods for Linear Equations

23
Augmented Matrix:

24
Row Operations on an Augmented Matrix 1. Interchange any two rows. 2. Replace a row by a nonzero multiple of that row. 3. Replace a row by the sum of that row and a constant multiple of some other row.

25
Echelon Form of an Augmented Matrix

31
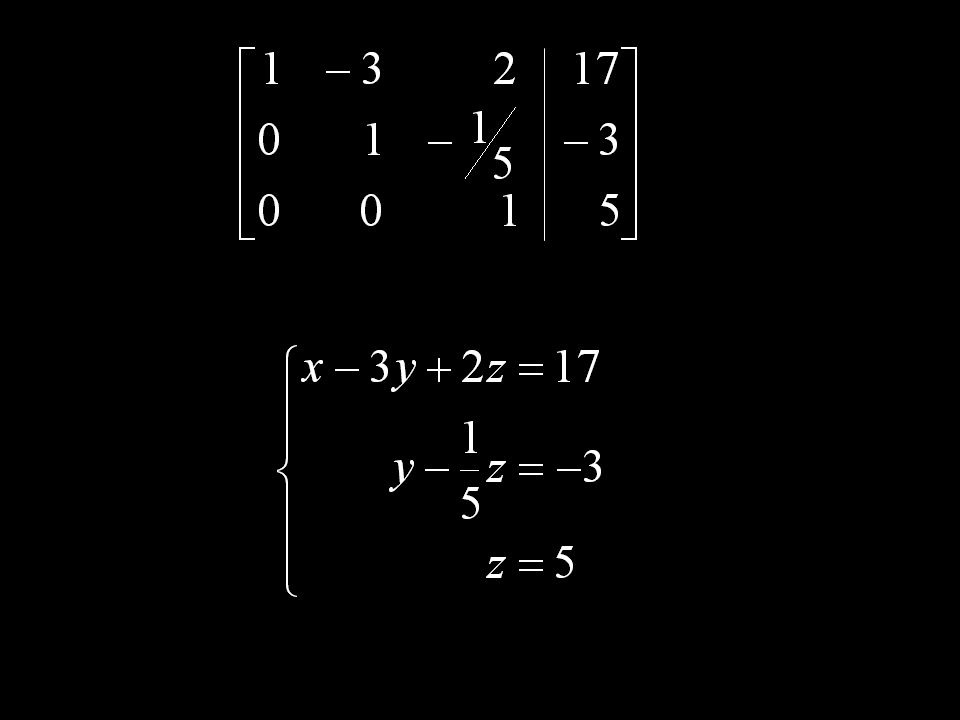
Let z = 5 in (2):Let y = -2, z = 5 in (1): Solution: x = 1, y = -2, z = 5
:Let y = -2, z = 5 in (1): Solution: x = 1, y = -2, z = 5")
32
Solve using a graphing utility.

33
Dependent system: Infinitely many solutions

35
The system is inconsistent. No solution.

36
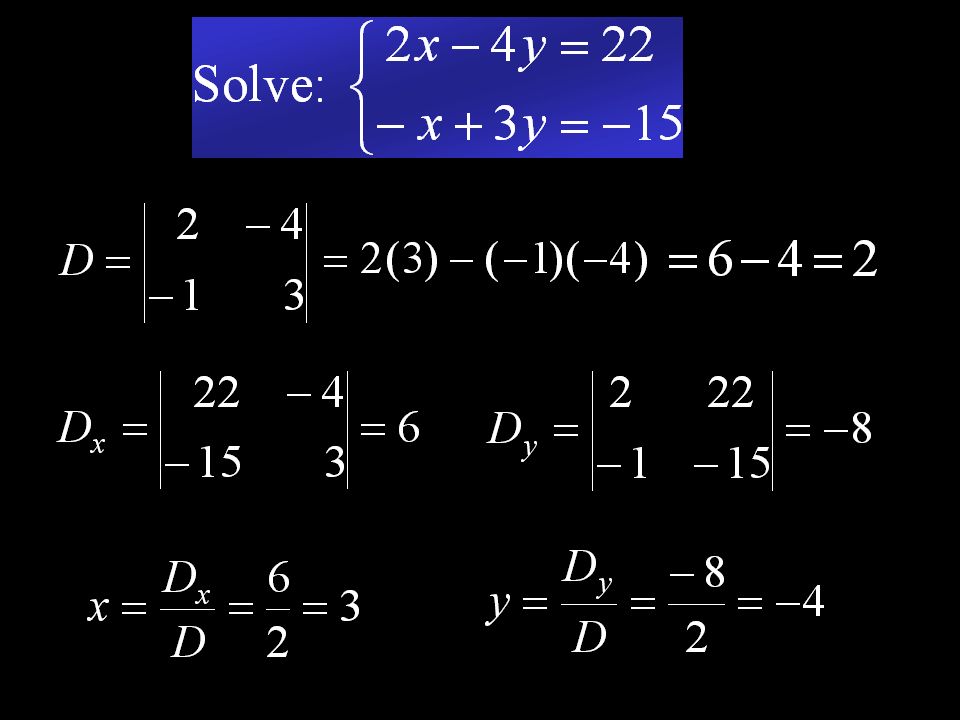
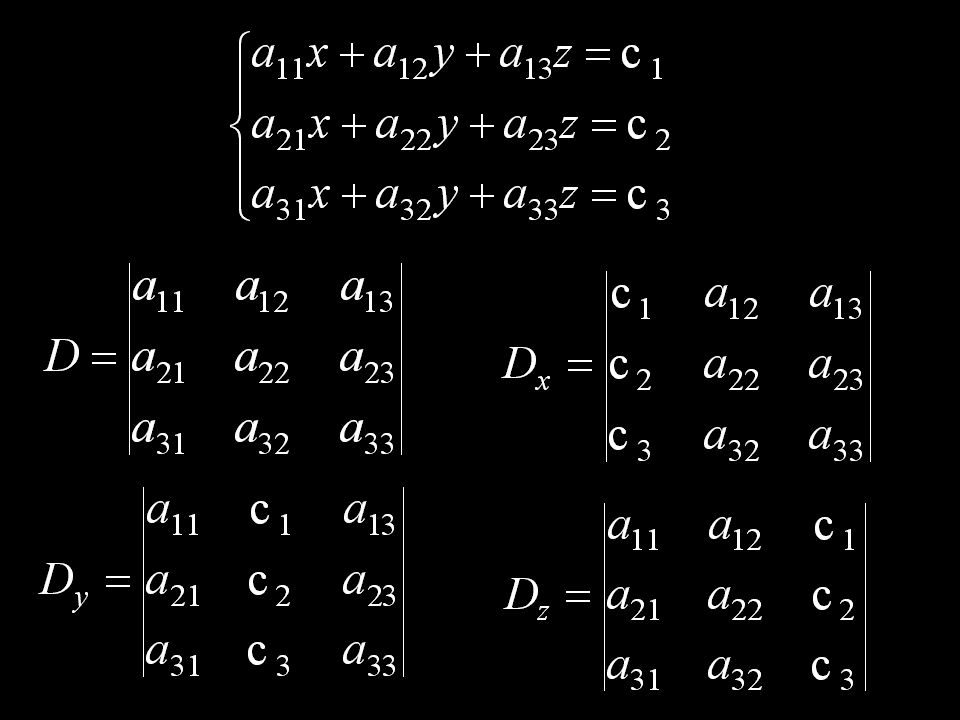
Cramer’s Method for Linear Equations

37
Theorem: Cramer’s Rule

39
If D = 0, then the system has infinitely many solutions or is inconsistent and therefore has no solution.

40
A 3 by 3 determinant is symbolized by

42
When evaluating a determinant, you can expand across any row or down any column you choose.

44
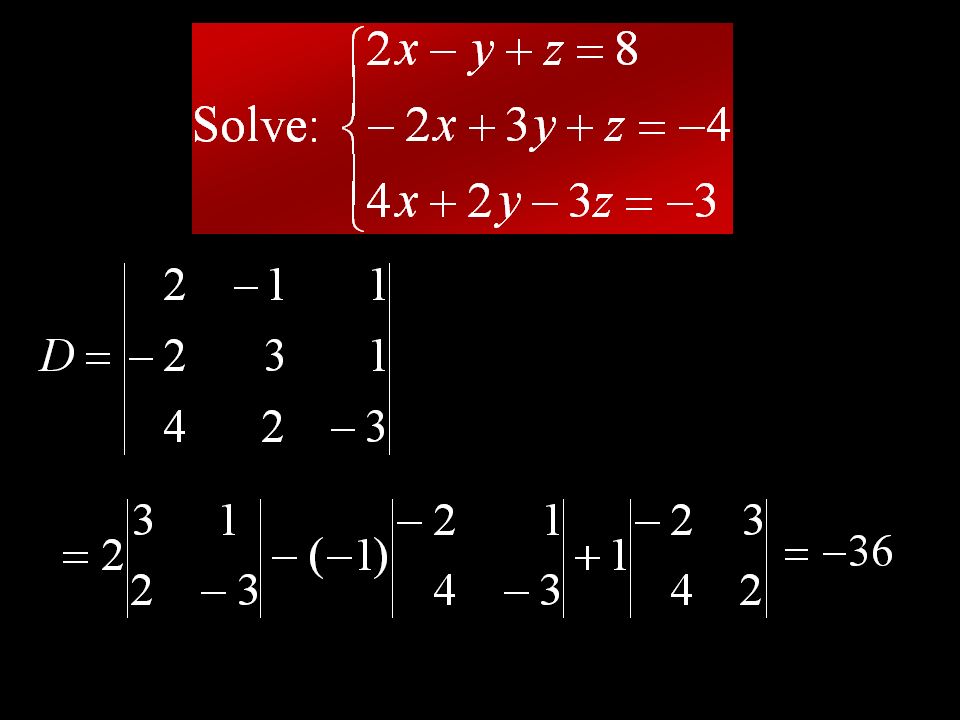
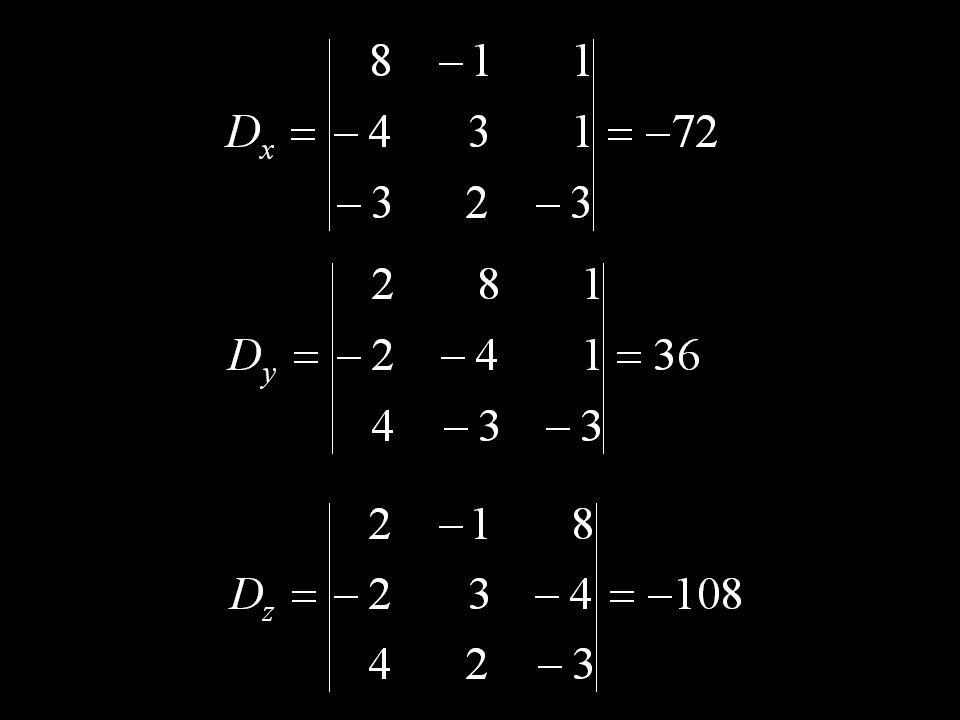
Cramer’s Rule for Three Equations Containing Three Variables provided

47
Solution: x = 2, y = -1, z = 3

48
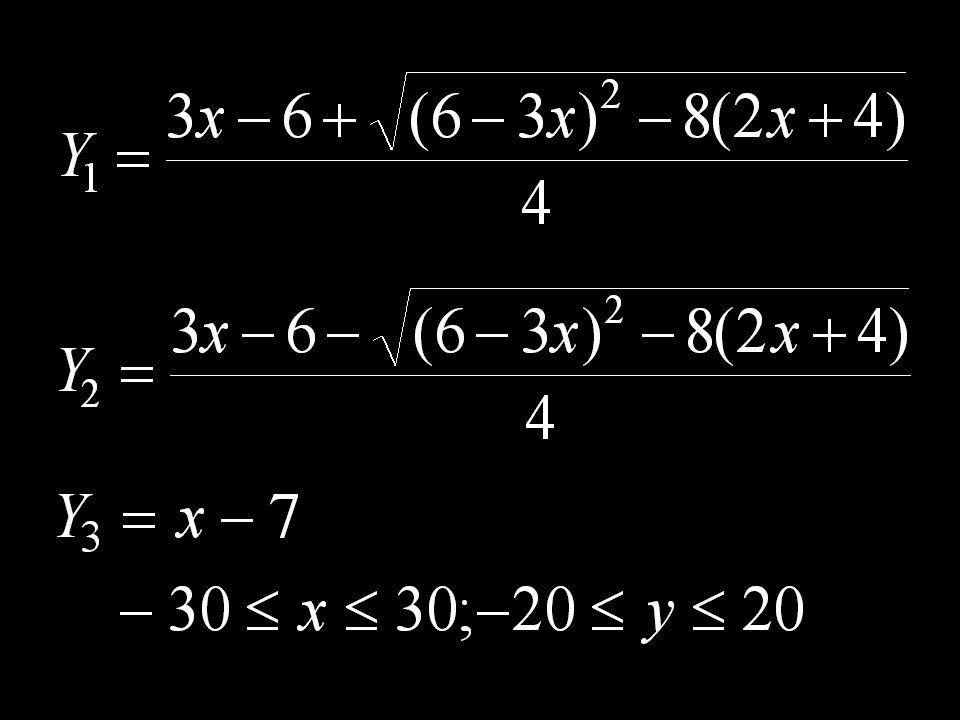
Solving Non-linear Systems of Equations Two algebraic methods: 1. Substitution 2. Elimination The first example here is one quadratic equation with one linear equation. The second example here is two quadratic equations.

49
a = 2, b = 6 - 3x, c = 2x + 4 The hard way: Use quadratic formula on (1) to get,
 to get,")
50
The easy way: Solve linear equation (2) to get y(x). Compare y(x) formulas from hard and easy ways on next slide.
 formulas from hard and easy ways on next slide..")
52
Continuing easy way solution to end:

55
Multiply (1) by -1 Add (1) and (2) Examples of two quadratic equations:
 by -1 Add (1) and (2) Examples of two quadratic equations:")
56
No Solution with y=-2/9. Try each y possibility in (1).
.")
57
x = 0 Solution: (0, 2)
")
58
Systems of Linear Inequalities & Linear Programming

59
Test point: (1, 3) 2(1) - 3 - 8 = -9 < 0 Does not belong to graph Test point: (5, 1) 2(5) - 1 - 8 = 1 > 0 Belongs to graph 2x - y -8 > 0
 2(1) = -9 < 0 Does not belong to graph Test point: (5, 1) 2(5) = 1 > 0 Belongs to graph 2x - y -8 > 0")
60
-10 y = 2x - 8 5 (1,3) not on graph (5,1) is on graph Shaded area but not line is graph.
 not on graph (5,1) is on graph Shaded area but not line is graph.")
61
Graph x - y = 6 y = x - 6 Graph 4x + 2y = 10 2y = -4x + 10 y = -2x + 5

62
y = x - 6 y = -2x + 5

63
Test Point: (0, 0) x - y > 6 0 - 0 > 6 NO, shade side opposite (0, 0). 4x + 2y < 10 4(0) + 2(0) < 10 Yes, shade side containing (0, 0).
 + 2(0) < 10 Yes, shade side containing (0, 0)..")
64
y = x - 6 y = -2x + 5 Shaded area including its linear boundaries is graph.

65
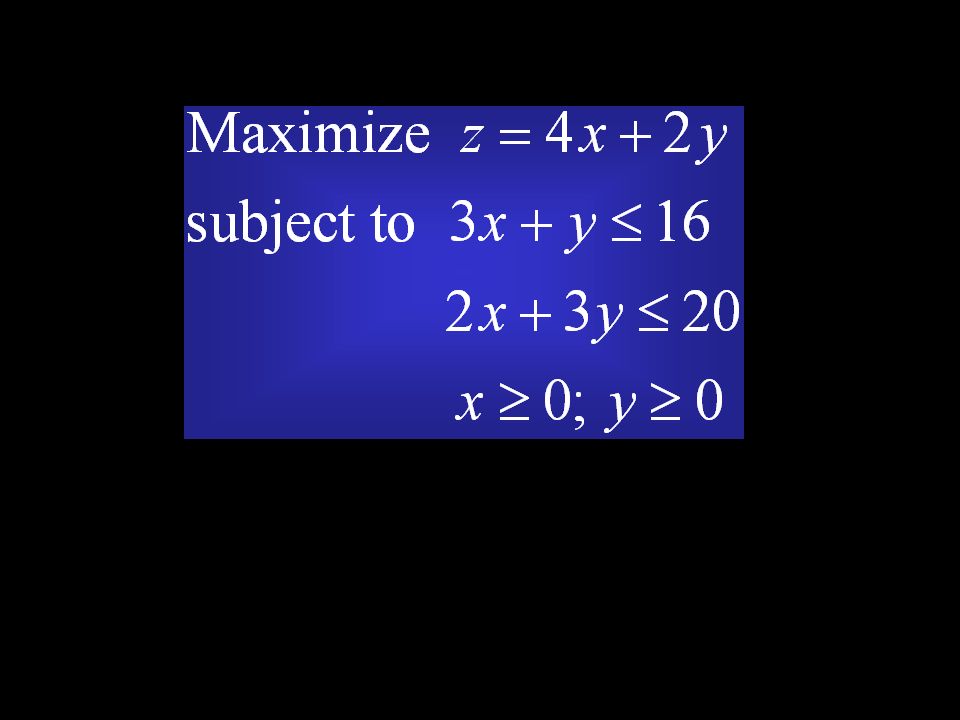
A linear programming problem in two variables x and y consists of maximizing (or minimizing) a linear objective function z = Ax + By, A and B are real numbers, not both 0 subject to certain constraints expressible as linear inequalities in x and y.
 a linear objective function z = Ax + By, A and B are real numbers, not both 0 subject to certain constraints expressible as linear inequalities in x and y.")
67
y = -3x + 16 (0,0) (0, 20/3) (16/3, 0) (4, 4)
 (0, 20/3) (16/3, 0) (4, 4)")
68
The maximum value of z is 24 and occurs at the point (4, 4).
.")
69
Theorem: Location of the Solution of a Linear Programming Problem If a linear programming problem has a solution, it is located at a corner point of the graph of the feasible points. If a linear programming problem has multiple solutions, at least one of them is located at a corner point of the graph of the feasible points. In either case, the corresponding value of the objective function is unique.

Similar presentations