Download presentation
Presentation is loading. Please wait.

1
Approximation algorithms for TSP with neighborhoods in the plane R90922026 郭秉鈞 R90922038 林傳健

2
The Problem TSPN: Euclidean TSP with neighborhoods in the plane, i.e., dimention = 2 Definition: A salesman wants to meet a set of potential buyers. Each buyer specifies a region of the plane, his neighborhood. The salesman wants to find a tour of shortest length that visit all buyers’ neighborhoods.

3
Part 1: Introduction

4
Introduction O(1)-approximation algorithm for TSPN on disks of the same size A PTAS for disjoint equal disks O(1)-approximation algorithm for TSPN on connected regions of the same diameter O(1)-approximation algorithm running in linear time for TSPN on lines
-approximation algorithm for TSPN on disks of the same size A PTAS for disjoint equal disks O(1)-approximation algorithm for TSPN on connected regions of the same diameter O(1)-approximation algorithm running in linear time for TSPN on lines")
5
Part 2: O(1)-approximation for TSPN on disks of the same size
-approximation for TSPN on disks of the same size")
6
Equal Disks Assume that all disks are unit Simplify the problem to unit disks First case on disjoint unit disks Simply approximate on centers of disks Argue with the bounds: Tc for center tour, Tr for region tour

7
Disjoint Unit Disks

8
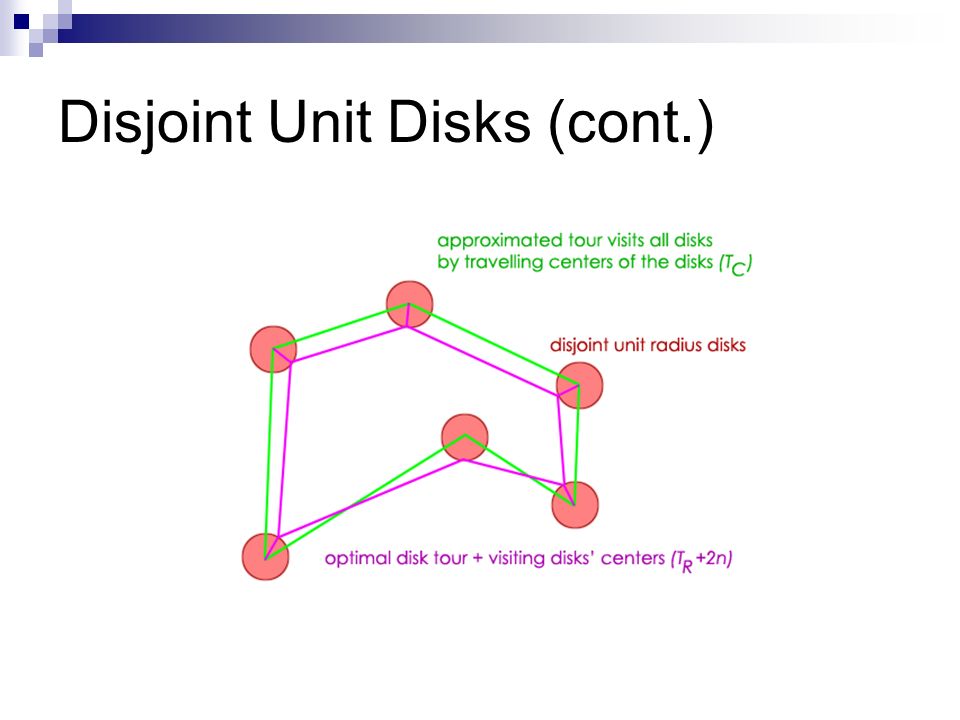
Disjoint Unit Disks (cont.) Sweep along center tour with a disk of radius 2 Ratio <= 3.55 for n large
 Sweep along center tour with a disk of radius 2 Ratio <= 3.55 for n large")
9
Disjoint Unit Disks (cont.)
")
11
Expect ration cannot smaller than 2

12
Overlapping Unit Disks Algorithm: Compute maximal independent pairwise- disjoint set of disks Compute Ci, the approximation of the center tour above Output R, obtained by going along Ci and boundaries of each disks in the set Argue with the ratio <= 11.15

13
Overlapping Unit Disks (cont.) OPT: optimal tour of the problem OPTi: optimal tour of independent set R: approximated result Ci: center tour of independent set
 OPT: optimal tour of the problem OPTi: optimal tour of independent set R: approximated result Ci: center tour of independent set")
14
Overlapping Unit Disks (cont.)
")
15
Part 3: A PTAS for disjoint equal disks

16
Slide not finished

17
Part 4: O(1)-approximation algorithm for TSPN on connected regions of the same diameter
-approximation algorithm for TSPN on connected regions of the same diameter")
18
Definition 4.1. (diameter of a region) The diameter of a region, δ, is the distance between two points in the region that are farthest apart In the problem here we deal with connected regions of the same diameter. Without loss of generality, we assume that all regions have unit diamter, δ = 1.
 The diameter of a region, δ, is the distance between two points in the region that are farthest apart In the problem here we deal with connected regions of the same diameter. Without loss of generality, we assume that all regions have unit diamter, δ = 1..")
19
Lemma 4.2.(Combination Lemma) Given regions that can be partitioned into two types, and constants c 1, c 2 bounding the error ratios with which we can approximate optimal tours on regions of type 1 and 2, then we can approximate the optimal tour on all regions with an error ratio bounded by c 1 + c 2 + 2
 Given regions that can be partitioned into two types, and constants c 1, c 2 bounding the error ratios with which we can approximate optimal tours on regions of type 1 and 2, then we can approximate the optimal tour on all regions with an error ratio bounded by c 1 + c 2 + 2")
20
Two types of connected regions (1) Those for which the selected diameter is almost horizontal, by which we mean its slope is between -45° and 45°; (2) Those for which the selected diameter is almost vertical, by which we mean all others. The paper provide an constant ratio approximation algorithm for each of these two region types, and then apply Lemma 4.2.

21
Fig 4.a. (two types of regions)
")
22
Fact 4.3. A tour touching all four sides of a rectangle is of length at least twice the diagonal of the rectangle. See Fig 4.b. to get the idea.

23
Fig 4.b. The shortest tour hits each side is equal to the angle with which it departs that side, by Snell’s law

24
Fact 4.4. For positive a, b, w, h the following inequality holds.

25
Definition 4.5.(covering lines) A set of lines is a cover of a set of regions if each region is intersected by at least one line from the covering set. We refer to this set of lines as covering lines.

26
The algorithm – step 1 W.l.o.g. we use the algorithm for type (1) Construct a greedy covering lines of the regions by a minimum number of vertical lines. The procedure works in a greedy fashion, namely the leftmost line is as far right as possible, so that it is a right tangent of some region. Then representative points of each region are arbitrarily selected on the corresponding covering lines.
 Construct a greedy covering lines of the regions by a minimum number of vertical lines. The procedure works in a greedy fashion, namely the leftmost line is as far right as possible, so that it is a right tangent of some region. Then representative points of each region are arbitrarily selected on the corresponding covering lines..")
27
Fig 4.c.(greedy covering lines & representative points)
")
28
The algorithm – step 2 Proceed according the following three cases. Case 1: The greedy cover contains one covering line. Case 2: The greedy cover contains two covering lines. Case 3: The greedy cover contains at least three covering lines.

29
The algorithm – step 2 – case 1 One covering line. Compute a smallest perimeter rectangle Q of width w and height h that touches all regions. Add twice the two vertical segments of height h which divide its width in three equal parts, to get a tour R. Output R.

30
Fig 4.d.

31
Fig 4.e.

32
Fig 4.f.

33
Proof of step 2 - case 1

34
The algorithm – step 2 – case 2 Two covering lines Move the rightmost vertical covering line to the left as much as possible. Set D to be the distance between the two covering lines, clearly D > 0.

35
The algorithm – step 2 – case 2.1 D >= 3 Construct rectangle Q of width w = D, with its vertical sides along the two covering lines, and of minimal height h, which includes all representative points (on the two covering lines). Output the tour R that is the perimeter of Q.

36
Fig 4.g.

37
Proof of step 2 – case 2.1 Case 2.1.a. h<=2 Case 2.1.b. h>=2

38
The algorithm – step 2 – case 2.2 D <= 3 Compute a smallest perimeter rectangle Q with width w and height h that touches all regions. Add twice the seven vertical segments of height h which divide its width into eight equal parts, to get a tour R. Output R.

39
Fig 4.h.

40
Proof of step 2 – case 2.2

41
The algorithm – step 2 – case 3 At least three covering lines Construct R, a (1+ε)-approximation tour of the representative points as the output tour.
-approximation tour of the representative points as the output tour.")
42
Proof of step2 – case 3 Partition the optimal tour OPT into blocks OPT i, with i >= 1. OPT i starts at an arbitrary point of intersection of OPT with the ith covering line from left, and ends at the last intersection of OPT with the (i+1)th covering line from left. Consider the bounding box of OPT i, the smallest perimeter aligned rectangle which includes OPT i, w for its width and h for its height.
th covering line from left. Consider the bounding box of OPT i, the smallest perimeter aligned rectangle which includes OPT i, w for its width and h for its height..")
43
Proof of step2 – case 3.1 OPTi intersects regions stabbed by two consecutive covering lines only l1, l2 say, at distance w1.

44
Fig 4.i.

45
Fig 4.j.

46
Proof of step 2 – case 3.2 OPTi intersects regions stabbed by three consecutive covering lines only, l1, l2, l3 say at distances w1, w2.

47
Fig 4.k.

48
Fig 4.l.

49
Some special cases Parallel equal segments Convex region

50
Part5 O(1)-approximation for TSPN on lines running in linear time
-approximation for TSPN on lines running in linear time")
51
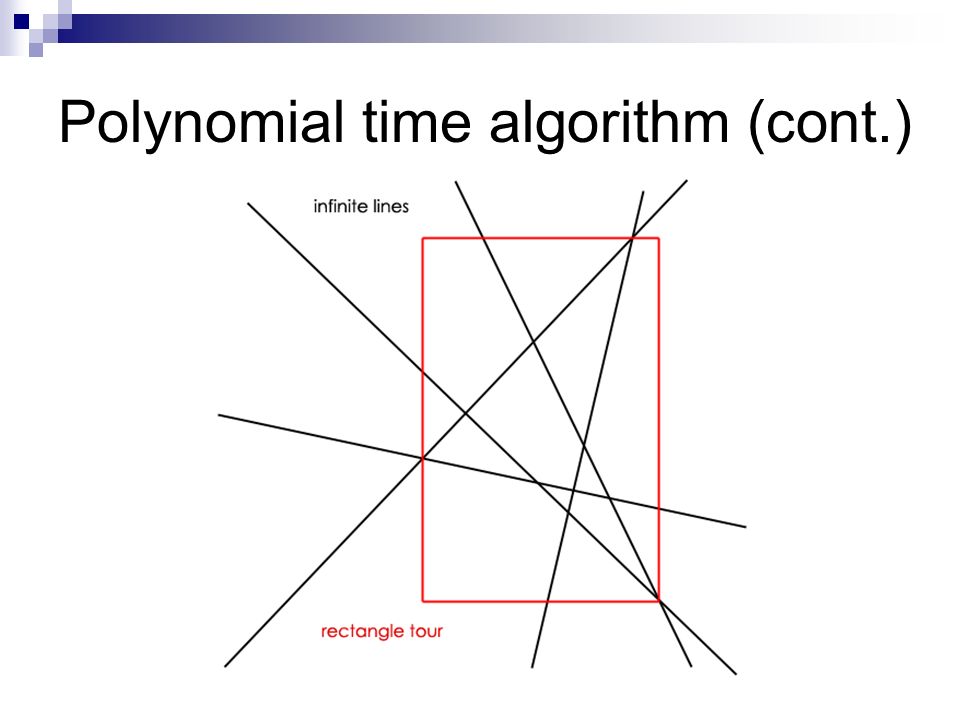
Lines for “Neighborhood” Infinite lines in the plane Find a tour that visits all lines in the plane Surprisingly, the problem is not in NP Can be computed in linear time O(n^6) Cause of the high running time, an approximation algorithm is expected Ratio <= 1.58
 Cause of the high running time, an approximation algorithm is expected Ratio <= 1.58")
52
Tour visits all lines

53
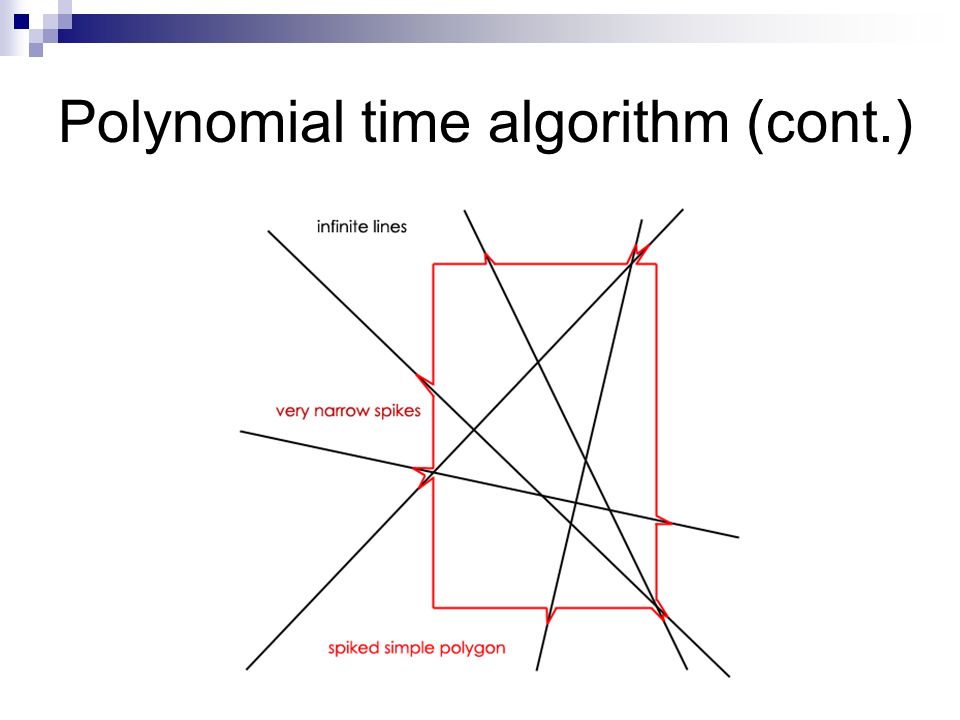
Polynomial time algorithm Convert the problem to “watchman route problem” and solve it in linear time Build rectangle covering all intersecting points of lines in L Grow 2 narrow spikes for every line yielding a simple polygon Solve the watchman route for 6n+4 vertices

54
Polynomial time algorithm (cont.)
")
57
Approximation on TSPN on Lines Algorithm: Compute a minimum touching circle that touches all lines, output the circle as the tour

58
Circle touching all lines

59
Optimal tour is convex Because if it is not convex, convex is better and still touching all lines

60
Optimal is convex

61
Minimum touching circle The minimum touching circle is determined by 3 lines, i.e. inscribed circle of the triangle

62
Minimum touching circle

63
Minimum touching convex in Triangle Case 1: acute triangle Case 2: obtuse triangle

64
Minimum touching convex in acute triangle

65
Minimum touching convex in obtuse triangle

66
Algorithm to compute the touching circle

67
Solving linear program in fixed dimension is in O(n)
")
Similar presentations











-Approximation Algorithm for 2-Line-Center P.K. Agarwal, C.M. Procopiuc, K.R. Varadarajan Computational Geometry 2003.>")

 algorithm for the zoo-keeper’s problem Sergei Bespamyatnikh Computational Geometry 24 (2003), pp. 63-74 4 th CGC Workshop.>")

 O. Schwartz & S. Safra.>")



