Download presentation
Presentation is loading. Please wait.

1
U NIVERSITY OF F LORIDA I NTIMI GATOR CDR

2
O UTLINE Overview System Design Recovery Design Payload Design Vehicle Optimization Simulations and Performance Testing

3
P ROJECT S UMMARY Launch Vehicle The launch vehicle is designed to reach an altitude of a mile It contains 3 separate payloads: The Science Mission Directorate payload measures atmospheric conditions and allows the calculation of lapse rate The Lateral Flight Dynamics payload collects data on the vehicle’s roll rate for analysis The Flow Angularity and Boundary Layer Development payload aids the team in knowing the vehicle orientation There is dual-deployment recovery, with separate drogue and main parachutes for the SMD payload lander and launch vehicle

4
O UTLINE Overview System Design Recovery Design Payload Design Vehicle Optimization Simulations and Performance Testing

5
S YSTEM

6
V EHICLE D IMENSIONS Diameter: 6 inches Length: 115 inches Weight: 29 lbs ComponentWeight (lbs) Fins (2 with rollerons and 2 without)5 Pneumatics Bay1.5 Main Parachute/Shock Cord and Piston3 Avionics Bay3.25 Payload and Main Drogue Parachute Piston0.25 Payload Main Parachute and Housing4 Drogue Parachutes and Shock Cord1.5 Nosecone and Pressure Payload4.25 Body Tube6.25 Total29 SectionLength (in) Nosecone24 Upper Airframe44 Avionics Bay3 Mid Airframe16 Lower Airframe28 Total115
 Fins (2 with rollerons and 2 without)5 Pneumatics Bay1.5 Main Parachute/Shock Cord and Piston3 Avionics Bay3.25 Payload and Main Drogue Parachute Piston0.25 Payload Main Parachute and Housing4 Drogue Parachutes and Shock Cord1.5 Nosecone and Pressure Payload4.25 Body Tube6.25 Total29 SectionLength (in) Nosecone24 Upper Airframe44 Avionics Bay3 Mid Airframe16 Lower Airframe28 Total115")
7
S TATIC S TABILITY M ARGIN The static stability margin is 3.03 CP = 91.1” CG = 72.7”

8
Dimensions: F INS Fins and mount made from ABS plastic on a rapid prototype machine Root Cord11" Tip Cord6” Span6" Max Thickness.5"

9
M OTOR S ELECTION Cessaroni L1720 WT 1755 grams of propellant Total impulse of 3660 N-s 2.0 second burn time Altitude of 5280 feet 2.2 pound margin for error

10
O UTLINE Overview System Design Recovery Design Payload Design Vehicle Optimization Simulations and Performance Testing

11
V EHICLE R ECOVERY Dual Deployment Drogue release at apogee Main release at 700 ft AGL Drogue Parachute 36 inches in diameter Descent velocity of 65 ft/s Main parachute 96 inches in diameter Descent velocity 18 ft/s Recovery harness 5/8” nylon 25ft nosecone-upper 35ft lower-upper

12
V EHICLE R ECOVERY S YSTEMS Drogue parachute Directly below nosecone Released during first separation event Main parachute Housed in middle airframe between avionics bay and pneumatics bay Released during second separation event Separation between pneumatics bay and middle airframe

13
SMD P AYLOAD R ECOVERY Dual Deployment Drogue release at apogee Main release at 700 ft AGL Drogue Parachute 36 inches in diameter Descent rate of 25 ft/s Main Parachute 36 inches in diameter Descent rate of 12.5 ft/s Recovery harness 3/8” nylon 10-15 ft

14
SMD P AYLOAD R ECOVERY S YSTEMS Drogue parachute Released during first separation event Housed directly below vehicle drogue parachute Main parachute Released from parachute housing during secondary payload separation event stored in housing and ejected using a piston system

15
K INETIC E NERGY AT K EY P OINTS Launch Vehicle SMD Payload Lander

16
O UTLINE Overview System Design Recovery Design Payload Design Vehicle Optimization Simulations and Performance Testing

17
S CIENCE M ISSION D IRECTORATE P AYLOAD – O BJECTIVES AND R EQUIREMENTS Objective To calculate the environmental lapse rate Requirements Measure temperature, pressure, relative humidity, solar irradiance, and UV radiation as a function of altitude GPS readings and sky-up oriented photographs Wireless data transmission

18
S CIENCE M ISSION D IRECTORATE P AYLOAD Rests in the upper airframe on top of a piston Ejects from the rocket at apogee Dual deployment recovery

19
S CIENCE M ISSION D IRECTORATE P AYLOAD Payload legs spring open upon ejection Some atmospheric sensors mounted on the lid Body made of blue tube for data transmission purposes

20
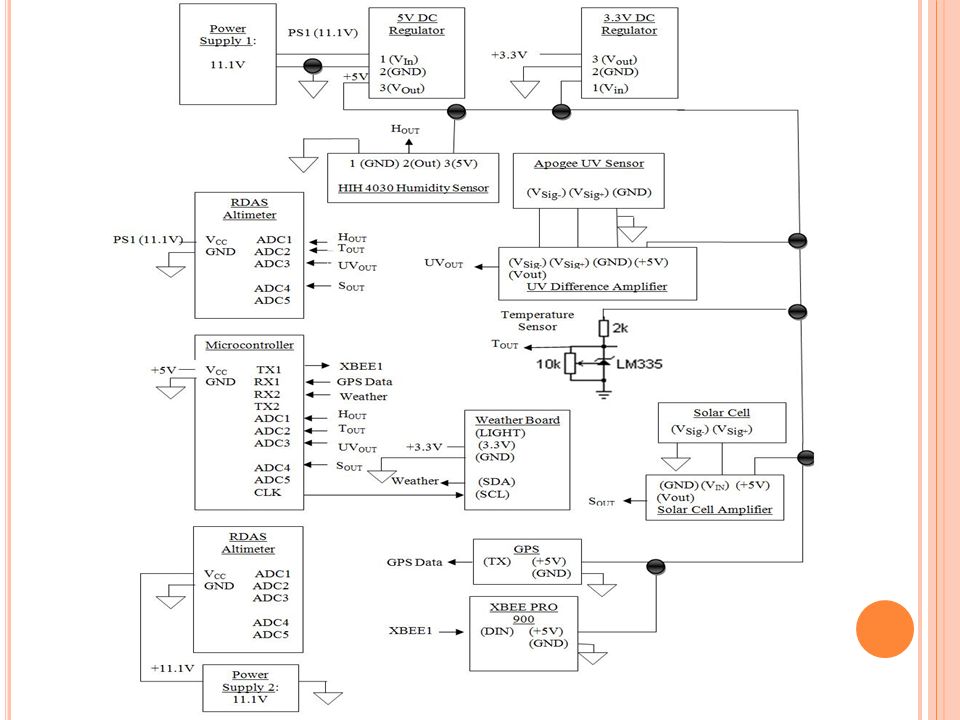
S CIENCE M ISSION D IRECTORATE P AYLOAD D ESIGN Arduino Microcontroller Samples analog sensors and reads outputs from Weatherboard and GPS Weatherboard Senses atmospheric data and transmits to the microcontroller using synchronous communication Analog sensors Compared to the pre-programmed output from the Weatherboard XBee Pro 900 Sends data back to ground station Camera Takes sky-up oriented video

21
L ATERAL F LIGHT D YNAMICS (LFD) Objectives Introduce a determinable roll rate during flight after burn- out Derive ODEs of the rockets roll behavior Use linear time invariant control theory to evaluate roll dampening using rollerons Determine percent overshoot, steady state error, and settling time Requirements Ailerons deflect with an impulse to induce roll Rollerons inactively dampen roll rate
 Objectives Introduce a determinable roll rate during flight after burn- out Derive ODEs of the rockets roll behavior Use linear time invariant control theory to evaluate roll dampening using rollerons Determine percent overshoot, steady state error, and settling time Requirements Ailerons deflect with an impulse to induce roll Rollerons inactively dampen roll rate")
22
LFD Procedures (after burnout) Phase I Ailerons impulse deflect Rollerons locked Rocket naturally dampens its roll rate Phase II Ailerons impulse deflect Rollerons unlocked Rollerons dampen out roll rate
 Phase I Ailerons impulse deflect Rollerons locked Rocket naturally dampens its roll rate Phase II Ailerons impulse deflect Rollerons unlocked Rollerons dampen out roll rate")
23
LFD F IN L AYOUT Uses pneumatic actuators to unlock rollerons and deflect ailerons Rollerons locked using a cager Rolleron Cager Aileron Aileron Actuator

24
LFD M ANUFACTURING All components locally manufactured Wheel on MillFinished Wheel Casing

25
LFD ANALYSIS Roll data points analyzed using numerical methods Plots roll characteristics Derives an ODE Linear Time Invariant Control Theory Governing equation - ODE transformed into Laplace form (frequency domain) Impulse function (R(s) = 1) is applied to the plant (G p ) From the plants denominator the frequency can be determined
 Impulse function (R(s) = 1) is applied to the plant (G p ) From the plants denominator the frequency can be determined")
26
F LOW A NGULARITY Objectives Take differential pressure readings from each transducer Determine angularity and boundary layer properties Requirements Pre-calibration in wind tunnel will result in non- dimensional coefficients Can be compared to flight results to obtain angularity Calibration involves testing probe at multiple angles and flow velocities

27
F LOW A NGULARITY S CHEMATICS

28
F LOW A NGULARITY A NALYSIS Non-dimensional coefficients

29
O UTLINE Overview System Design Recovery Design Payload Design Vehicle Optimization Simulations and Performance Testing

30
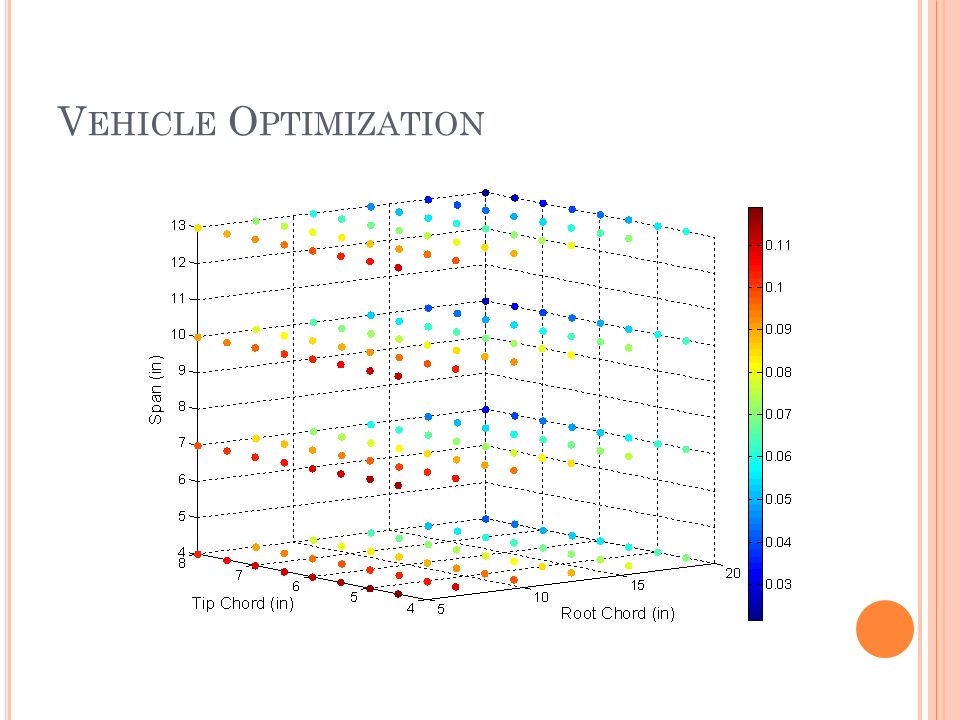
V EHICLE O PTIMIZATION Objective Optimize rocket geometry to maximize performance Create a robust design that can accommodate any uncertainties in the EOM Requirements Determine uncertainty in the EOM Perform parametric analysis

31
V EHICLE O PTIMIZATION Vertical EOM: Manufacturer Specifications From RockSim Mass variance during thrust; Low uncertainty Standard Atmosphere Design Space Variable

32
V EHICLE O PTIMIZATION Cost Function: Want to maximize delta drag coefficient while still attaining target altitude

33
V EHICLE O PTIMIZATION Design Space: Span (in) = [4, 7, 10, 13] Root chord (in) = [5, 8, 11, 14, 17, 20] Tip chord (in) = [4.5, 5, 5.5, 6, 6.5, 7, 7.5, 8] Fin location longitudinally (in) = [85, 90, 95, 100] Determined based on minimum required dimensions for rolleron payload
![V EHICLE O PTIMIZATION Design Space: Span (in) = [4, 7, 10, 13] Root chord (in) = [5, 8, 11, 14, 17, 20] Tip chord (in) = [4.5, 5, 5.5, 6, 6.5, 7, 7.5, 8] Fin location longitudinally (in) = [85, 90, 95, 100] Determined based on minimum required dimensions for rolleron payload](http://images.slideplayer.com/25/8152364/slides/slide_33.jpg "V EHICLE O PTIMIZATION Design Space: Span (in) = [4, 7, 10, 13] Root chord (in) = [5, 8, 11, 14, 17, 20] Tip chord (in) = [4.5, 5, 5.5, 6, 6.5, 7, 7.5, 8] Fin location longitudinally (in) = [85, 90, 95, 100] Determined based on minimum required dimensions for rolleron payload")
34
V EHICLE O PTIMIZATION Results: Fin location has no impact on vehicle drag and can be altered to attain desired static margin Area of low sensitivity occurs at minimum values of geometric design space Maximum drag capacity occurs at minimum values of geometric design space

35
V EHICLE O PTIMIZATION

37
O UTLINE Overview System Design Recovery Design Payload Design Vehicle Optimization Simulations and Performance Testing

38
F LIGHT S IMULATIONS Used RockSim and MATLAB to simulate the rocket’s flight MATLAB code is 1-DOF that uses ode45 Allows the user to vary coefficient of drag for different parts of the rocket After wind tunnel testing, can get fairly accurate CD values that can be used in the program

39
P ERFORMANCE MATLAB code is compared with RockSim Led to design changes Maximum altitude predictions separated by 71 ft maximum altitude predicted by RockSim of 5352 ft Room for unexpected mass or drag due to the simulations reaching over one mile

40
P ERFORMANCE Thrust-to-weight ratio 12.98 Need above 1 for lift-off Rail exit velocity 76.8 ft/s

41
D RIFT C ALCULATIONS

42
O UTLINE Overview System Design Recovery Design Payload Design Vehicle Optimization Simulations and Performance Testing

43
C OMPONENT T ESTING S UMMARY All components of the launch vehicle and three payloads have planned tests 21 tests outlined in detail in CDR report Ensure all design details will work as expected Allow the team to make necessary adjustments Make sure the vehicle has a successful competition launch

44
C OMPLETED T ESTS Test # Components Tested Testing DetailsReason For TestResults 2Body Tube Determine the strength of the charge necessary to separate the different sections of the rocket by trying different sized charges Defer any complications during flight and ensure the rocket can separate Ejection charges were more than adequate to separate the rocket tube 10 Sub-Scale Motor Determining the thrust curve of the motor Determine whether the rocket motor has enough force to launch rocket and its components to desired height Motor test was successful, and had enough thrust to get the rocket to required height 12 Analog Readings, Temperature, Humidity, Solar, Pressure, UV Sensors will be placed in the payload to record data. Compare outputs with the digital weatherboard reads to ensure accuracy Humidity and Temperature Sensors tested and function properly others to be tested during January 14XBee'sSend sensor data and receive it on computer Required for USLI competitionSuccessful was able to send 9 Degrees of Freedom data back to the ground station during Subscale launch

45
S UBSCALE R ESULTS – D EC 10 TH Launched with Aerotech J500 Payload ejected at apogee and both payload and rocket drogue parachutes deployed Rocket drogue became entangled and only partially opened IntimiGATOR main parachute deployed at 700 ft upper airframe became detached from the middle airframe Payload main parachute did not deploy until landing No damage sustained

46
S UBSCALE F LIGHT AND S IMULATIONS Altitude data gathered from the flight was compared to both RockSim and MATLAB simulations The motor has a higher initial thrust than expected causing the discrepancy for the first 5 seconds Altitude reached: 1921 ft. RockSim predicted: 1896 ft. 9 degree launch angle led to the higher predicted altitude of the 1DOF MATLAB code

47
N EXT S UBSCALE L AUNCHES February 11 th, Bunnell, FL 1 st Flight Components tested Fin mount assembly SMD Payload main parachute deployment Dual separation Live data transmission 2 nd Flight Components Tested LFD payload system

48
Q UESTIONS ?

51
C OMMUNITY O UTREACH Gainesville High School 400 students throughout the school’s 6 periods Interactive PowerPoint Presentation covering the basics of rocketry Derivations of relatable equations Model rocket launches

52
C OMMUNITY O UTREACH PK Yonge Developmental and Research School 150 6 th grade students Interactive PowerPoint Presentation with videos Model rocket launches

Similar presentations



 NASA Student Launch Flight Readiness Review March 16, 2015.>")










 Diameter: 6 in Fin Semi-Span: 6 in.>")




