Download presentation
Presentation is loading. Please wait.

1
ICYCLER is an energy-efficient oceanographic profiler that does not require a surface float. Press ENTER to learn more ….

2
ICYCLER was originally developed to measure water properties under mobile ice, but now that the technology has been proven, other applications are also being investigated. Not a real iceberg, but representative.

3
“ICYCLER-50” (Prototype) “ICYCLER-60” Two versions of ICYCLER have been built so far, and a third (ICYCLER-75) is scheduled for testing in Winter/05.
 ICYCLER-60 Two versions of ICYCLER have been built so far, and a third (ICYCLER-75) is scheduled for testing in Winter/05.")
4
ICYCLER is a mooring that profiles a suite of oceanographic sensors up under the ice from a safe ice-free depth. It uses a two-float system to create a midwater platform from which the profiling is initiated. All of the oceanographic sensors are packaged into what we’re calling the Sensor Float (shown in yellow), and an echo- sounder is used to detect the ice above. Sensor Float Midwater Float Acoustic Release
, and an echo- sounder is used to detect the ice above. Sensor Float Midwater Float Acoustic Release.")
5
The strategy used by ICYCLER is to spend most of its time hiding in deep water (40m+) where the ice can’t affect it. ICYCLER wakes up everyday and determines how thick the ice is at that moment. Based on this decision, it moves it’s Sensor Float up under the ice, making measurements as it rises. Once the measurements are acquired, the Sensor Float is immediately pulled back down into deep water. Sensor Float Midwater Float Acoustic Release 40 m 200 m

6
Here are two pictures of the Sensor Float. One shows the exterior fairing. The other shows what’s inside (note that two buoyancy spheres have been removed for clarity). The CTD measures water properties, the Fluorometer measures light emitted by plankton, and the Echo Sounder measures distance to the underside of the ice.
. The CTD measures water properties, the Fluorometer measures light emitted by plankton, and the Echo Sounder measures distance to the underside of the ice..")
7
Sensor Float Midwater Float Acoustic Release EM Cable Electro-mechanical cable is used to connect the two floats and enable communication between them. The Midwater Float contains a winch that controls how far the Sensor Float rises. But the winch actually powers two drums simultaneously. One drum stores cable leading to the Sensor Float, and the other stores cable rising up from the anchor.

8
Sensor Float Midwater Float Acoustic Release ICYCLER uses the second winch drum to conserve energy as explained next. The efficiency of the mooring is affected by the speed of the water that flows past it. As water current speeds increase, the mooring tends to bend over. This reduces the maximum profiling height that ICYCLER can obtain.

9
This figure shows ICYCLER moored in 200m of water with it’s Sensor Float fully extended. ICYCLER-60 can profile a maximum distance of 60m in still water (the straight magenta line). If we position the Midwater Float at a depth of 40m, we’d have 20m of unused profiling height when water currents are light. These modeling results predict that ICYCLER-60 can reach the surface in water currents up to.50m/s (shown in red). In higher water currents, it’s not able to collect surface data.
. If we position the Midwater Float at a depth of 40m, we’d have 20m of unused profiling height when water currents are light. These modeling results predict that ICYCLER-60 can reach the surface in water currents up to.50m/s (shown in red). In higher water currents, it’s not able to collect surface data..")
10
To counteract this mooring dip problem, we could add more buoyancy to the system, or we could simply pay out more cable. But both these approaches would increase the size and weight of the instrument, making it more difficult to handle on the deck of a ship. A larger instrument also creates more hydrodynamic drag underwater, which adds to the mooring dip problem, and offsets the advantage of using more buoyancy (or cable), in the first place.
, in the first place..")
11
We feel that a more elegant solution is to use an energy-conserving mechanical design to reduce battery weight, and thereby gain buoyancy without increasing platform size. The energy-conserving principal that ICYCLER uses to profile it’s Sensor Float is analogous to how a standard passenger elevator operates. Instead of trying to lift the full weight of the elevator car and all it’s passengers, most elevators use a counter-weight balanced over a sheave. This substantially reduces the energy required to do the lifting.

12
On ICYCLER, the second winch drum is used to simultaneously move the Midwater Float in the opposite direction of the Sensor Float. As the Sensor Float moves up, the Midwater Float is winched down. On the next phase of the cycle, the Sensor Float is winched down and the Midwater Float is allowed to float back up to its original position. ICYCLER uses a 10:1 buoyancy ratio between the two floats; this allows the Sensor Float to move up 10 times as far as the Midwater Float is winched down. Or stated another way; a small buoyancy moving a long distance can represent the same energy as a large buoyancy moving a short distance. The only energy consumed by the system, is what’s lost to mechanical inefficiencies and imbalanced float drag 66m 6m

13
ICYCLER Profiling Animation

14
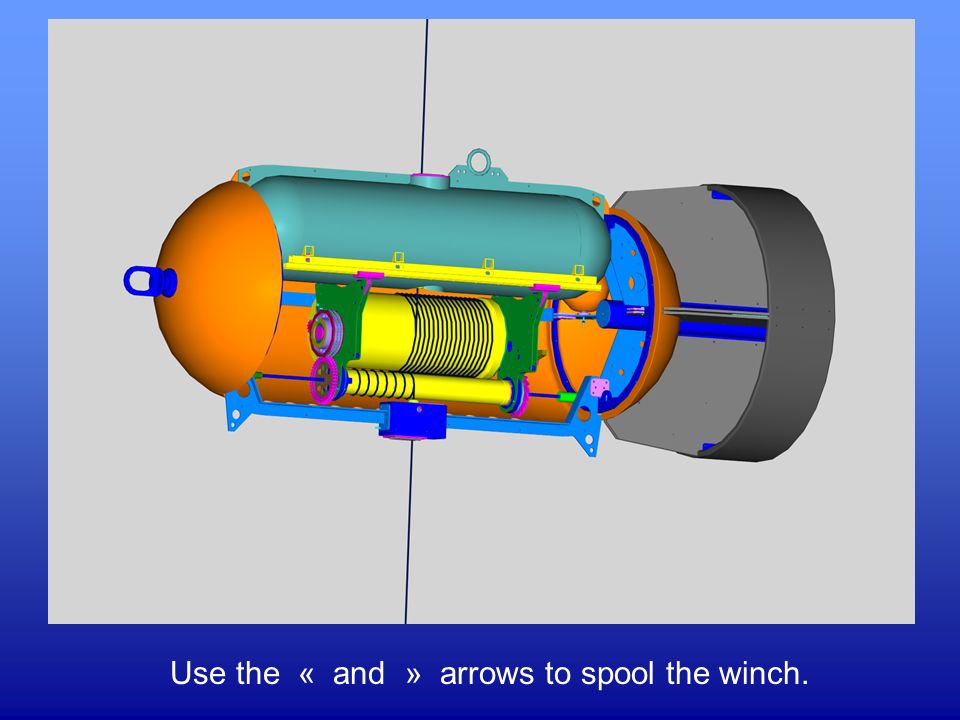
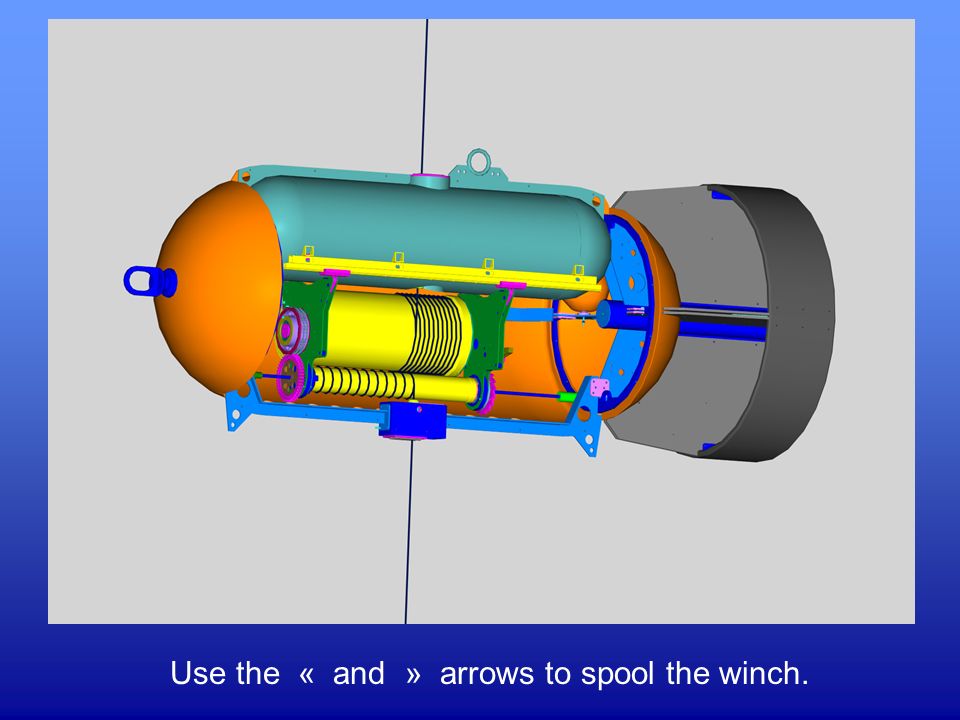
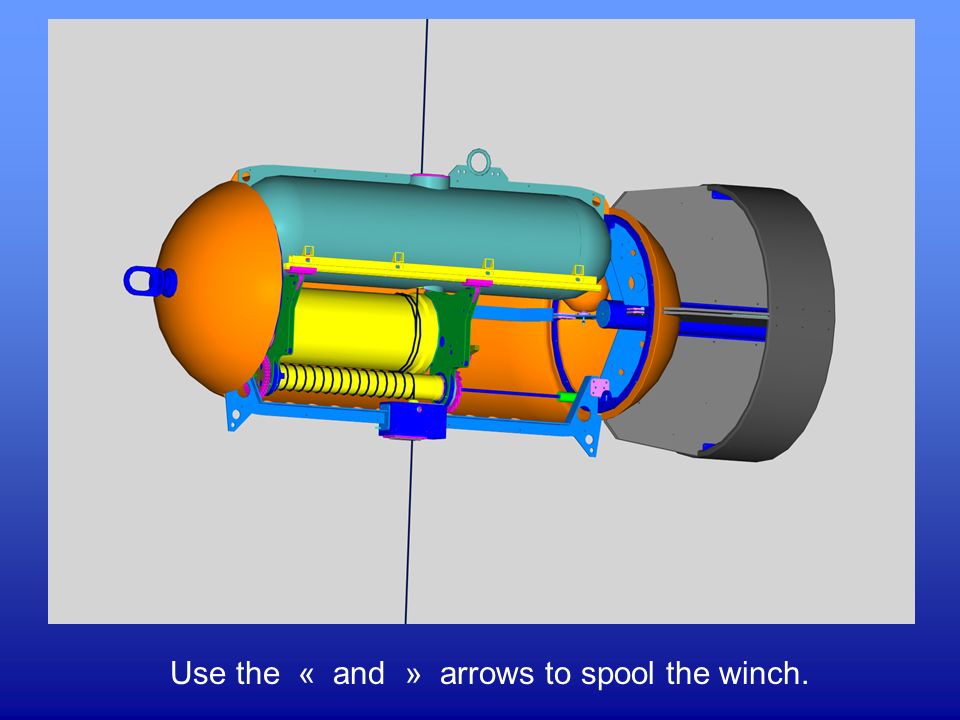
Buoyancy Tank Winch Drums Fairlead Linear Bearings Static Leadscrew Fairlead The ICYCLER-60 Midwater Float with one fairing removed. The winch is suspended on a track and is made neutrally buoyant so that it has no effect on float trim as it spools the cables through fixed fairleads.

15
Use the « and » arrows to spool the winch.

19
Electronics, Batteries & Drive Motor (Inside) Length = 3 m (10 ft) Weight = 3000 N (700 lbs) The winch is powered from within the large winch drum. The next picture shows what’s inside the drum.

20
The design improves reliability by minimizing the number of moving components exposed to the dirty seawater environment. This is what we’re calling ‘SeaMotor’. SeaMotor is a new self- contained drive system that powers the winch without the use of rotating seals.

21
To eliminate rotating seals, the batteries and drive motor are mounted on a pendulum suspended between the two endcaps. The drive motor engages an internal gear on the far endcap to rotate the drum. It works the same way that a mouse rotates an exercise wheel. As the mouse climbs up up the inside of the wheel, the mouse's own weight creates a torque on the wheel causing it to rotate. On SeaMotor, the drivemotor pushes against the weight of the suspended battery to rotate the drum.

22
ICYCLER-60 on it’s storage stand with SeaMotor in the foreground.

23
Test Results ICYCLER-60 being tested in 60m of water. During this test, the Sensor Float was successfully profiled 12 times to the surface from a depth of 38m. The average power consumption during each profiling operation was only 23 watts; about half that used by a standard light bulb. This means we should be able make 60m profiles, on a daily basis, for a full year, using less than 40 lbs of batteries.

24
ICYCLER-50 (Prototype) being retrieved from Barrow Strait after a year-long deployment under ice. Barrow Strait

25
Ice Thickness immediately above ICYCLER-50 during the year-long deployment. From September to January, ICYCLER-50 records some thick ice (8m+) interspaced with periods of open water. From January to March, the ice grows thicker, and it appears that a thick (8m) ridge of stationary ice sat over ICYCLER-50 from April until break-up in early June. Barrow Strait 2003/04; Ice Thickness Above ICYCLER-50
 interspaced with periods of open water. From January to March, the ice grows thicker, and it appears that a thick (8m) ridge of stationary ice sat over ICYCLER-50 from April until break-up in early June. Barrow Strait 2003/04; Ice Thickness Above ICYCLER-50.")
26
CTD data captured by ICYCLER-50 on 26/08/03 in Barrow Strait as it profiled to within 2m of the surface from a depth of 46m. The Salinity profile (water saltiness) shows the water getting fresher near the surface; probably due to ice melting in summer. Icycler collects similar measurements once per day for a full year.
 shows the water getting fresher near the surface; probably due to ice melting in summer. Icycler collects similar measurements once per day for a full year..")
27
The year-long Salinity record collected by ICYCLER-50. Some of the data gaps are caused by ice avoidance, but others are a result of mooring knock-down in high water currents.

28
NOTE: Data set is not calibrated. The year-long Fluorometer record collected by ICYCLER-50. The wavy pattern at the bottom of the plot is caused by the tide when monitoring sea level height at the same time each day.

29
Stuck In Ice? CTD Shut-off Failures? ICYCLER-50 CTD Min/Max’s 357 Profiles Attempted 4 Profiling Failures - 3 CTD Shut-off Failures - 1 Stuck in Ice ? 83% Mooring Knock-down Success (61 Profiles Wanted More Cable) (Note: ICYCLER-50 was moored at 46m, and profiles a maximum of 50m)
 (Note: ICYCLER-50 was moored at 46m, and profiles a maximum of 50m).")
30
ICYCLER-60 replaced the prototype, and is scheduled for recovery in Summer/05

31
ICYCLER-75 is designed to profile 75m, and will simplify the deployment procedure by allowing both floats to be deployed together. Testing is scheduled for Winter/05.

32
ICYCLER technology is also being developed for a deep-water use where it will incorporate wave-zone avoidance capabilities to prevent damage from storms, and employ satellite communication allowing near-real-time data collection.

33
For more info please contact: Greg Siddall Bedford Institute of Oceanography, Department of Fisheries & Oceans, Dartmouth, Nova Scotia, CANADA (902) 426-3223 SiddallG@mar.dfo-mpo.gc.ca (Icycler technology is patented)
 (Icycler technology is patented)")
34
Mooring knockdown from water currents limit deployment in excessive water depths. Mooring Knockdown (Assumes: Single 2000 lb Float,.25” Wire, Vertical Water Current Profile)
.")
Similar presentations








>")





 Heather Blaha Matt Fuxa Joey King Michael McConnell Domenic Tassoni.>")
. Mean Circulation in the Ocean Gulf Stream.>")



