Download presentation
Presentation is loading. Please wait.

1
ESTB in Maritime, Air and Land applications Jarosław Cydejko, Marek Grzegorzewski, Stanisław Oszczak, Adam Ciećko EGNOS WORKSHOP, 24 September 2004, Kraków

2
The maritime experiments verifying the ESTB performance in Poland: The maritime experiments verifying the ESTB performance in Poland: Maritime Academy in Gdynia Maritime Academy in Gdynia Maritime Office in Gdynia Maritime Office in Gdynia July 2001 – first tests in Gdynia - focused on the comparision of ESTB performance with other GPS-based methods of satellite positioning, such as maritime DGPS and standalone GPS; April 2002 – tests in Gdynia (East Coast) and Dziwnów (West Coast) – focused on the comparison of ESTB performances observed in different locations on the edge of system nominal coverage. NB: NB: Tests in static conditions; The receivers’ antennas located in known positions; Simultaneous observations for different systems, modes and locations; August 2003 – maritime tests conducted at sea, in the area of Gdańsk Bay within traffic separation scheme established on the approach waters to Gdynia and Gdańsk Harbours. NB: NB: Tests in dynamic conditions, on vessel navigating at sea; The ESTB position estimations refered to simultaneous RTK GPS observations; Simultaneous observations for different systems and modes;

3
Equipment – TOPCON Legacy- E with WAAS/EGNOS option

4
Position scatter plots – „all day” measurements, ESTB „mode 0” – ionocorrections included FIRST PHASE: July 2001 July 2001 all data collected in all data collected in Gdynia; Gdynia; 10 RIMS; 10 RIMS; EGNOS, GPS EGNOS, GPS DGPS (Rozewie); DGPS (Rozewie);
; DGPS (Rozewie);")
5
Horizontal Standard Deviation: EGNOS, GPS, DGPS First Phase: GDYNIA, July 2001

6
Position scatter plots – „all day” measurements, ESTB „mode 0” – ionocorrections included SECOND PHASE: April 2002 April 2002 data collected in data collected in Gdynia &Dziwnów Gdynia &Dziwnów 10 RIMS; 10 RIMS; EGNOS, GPS; EGNOS, GPS;

7
Horizontal Standard Deviation: EGNOS (two different locations), GPS EGNOS (two different locations), GPS Second Phase: GDYNIA, DZIWNÓW - April 2002
, GPS EGNOS (two different locations), GPS Second Phase: GDYNIA, DZIWNÓW - April 2002")
8
Average positions EGNOS, GPS, DGPS vs. reference point July 2001 April 2002

9
Maritime Tests (August 2003) The Survey Vessel „TUCANA” The Survey Vessel „TUCANA” Equipment Setup: TOPCON “Legacy-E” (1) GPS L1 – differential GPS using the ESTB signal; TOPCON “Legacy-E” (1) GPS L1 – differential GPS using the ESTB signal; TOPCON “Legacy-E” (2) GPS L1 - non-differential GPS standalone; TOPCON “Legacy-E” (2) GPS L1 - non-differential GPS standalone; Leica MX 9212 GPS L1 – maritime DGPS (Rozewie), Leica MX 9212 GPS L1 – maritime DGPS (Rozewie), Trimble 4700 Total Station – L1/L2 GPS RTK receiver. Trimble 4700 Total Station – L1/L2 GPS RTK receiver.

10
Maritime Tests (August 2003) Test area in Gdańsk Bay Test area in Gdańsk Bay
 Test area in Gdańsk Bay Test area in Gdańsk Bay")
11
Results (1)
")
12
Results (2)
")
13
Air Force Academy in Deblin TS 11 Iskra jet plane: June 2003 – BRDA experimet November 2003 – ODRA experimet Equipment used in the experimental flights: Ashtech Z-Surveyor (on-board) Garmin GPS Map 76S with EGNOS option, Javad Legacy with EGNOS option, Ashtech Z-Surveyor and Ashtech Z-XII (5 reference stations) Recording interval 1 sec – Ashtech 2 sec – Garmin 1 sec – Javad Air navigation experiments
 Garmin GPS Map 76S with EGNOS option, Javad Legacy with EGNOS option, Ashtech Z-Surveyor and Ashtech Z-XII (5 reference stations) Recording interval 1 sec – Ashtech 2 sec – Garmin 1 sec – Javad Air navigation experiments")
14
Example of jet plane trajectory

15
Antennae mounting

16
TS 11 Iskra GPS antennae

17
Difference between OTF and EGNOS (ESTB) positioning - Garmin
 positioning - Garmin")
19
Difference between OTF and EGNOS (ESTB) positioning – Javad Legacy E
 positioning – Javad Legacy E")
20
Comparison of flight tests results

21
in Central European Countries in 2002 Land navigation tests performed in Central European Countries in 2002 The main goal of performed trials was the use ESTB signal in satellite based navigation. The authors of the report carried out three experiments across the Central European Countries aiming at data collection during car navigation. The tests were performed in August – September 2002. North-East Poland, East Slovakia and North-East Italy were chosen as test areas. With current allocation of RIMS, the area of Poland and Slovakia is on the eastern edge of the predicted ESTB coverage (Figure 1).
..")
22
Olsztyn Kosice Trieste Location of the test area and predicted Horizontal Navigation System Error - HNSE(95%) of EGNOS System Test Bed (for 10 reference stations network).
 of EGNOS System Test Bed (for 10 reference stations network).")
23
GNSS receivers used in the experiments 2 Ashtech Z-XII geodetic receivers (used for calculation of the OTF car trajectory with one second interval) 2 NovAtel geodetic receivers with EGNOS option of University of Trieste Magellan Meridian Platinum handheld - the top model of popular Meridian Series, equipped with EGNOS option.
 2 NovAtel geodetic receivers with EGNOS option of University of Trieste Magellan Meridian Platinum handheld - the top model of popular Meridian Series, equipped with EGNOS option.")
24
Experiment in Olsztyn. Experiment in Trieste.

25
Olsztyn. Coordinates differences between OTF phase positioning and ESTB Magellan positioning

26
Kosice. Coordinates differences between OTF phase positioning and ESTB Magellan positioning

27
Trieste. Coordinates differences between OTF phase positioning and ESTB Magellan positioning

28
Trieste. Coordinates differences between OTF phase positioning and ESTB NovAtel positioning

29
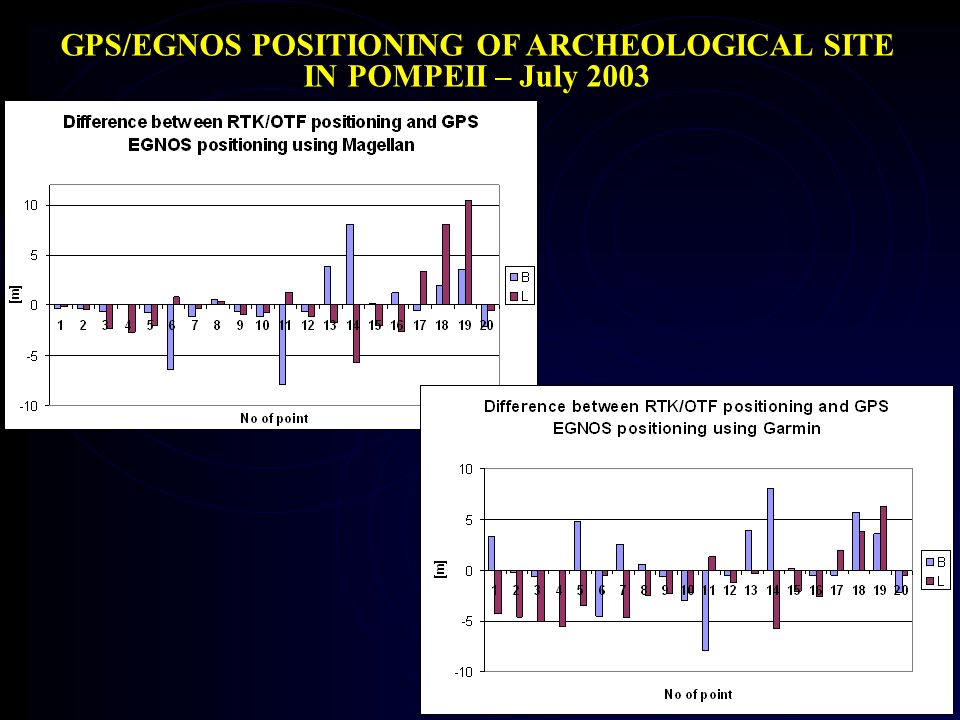
GPS/EGNOS POSITIONING OF ARCHEOLOGICAL SITE IN POMPEII – July 2003

31
50m

32
EGNOS – ESTB positioning used for parcel measuremets – On the Spot checks – Equipment Testing Phase 50 m GPS receivers subject to on-the-spot tests

33
EGNOS – ESTB positioning used for parcel measuremets – 2004 campaign (July-August 2004) – SATCON 50 m EGNOS correction availability disruption
 – SATCON 50 m EGNOS correction availability disruption")
34
EGNOS – ESTB positioning used for parcel measuremets – 2004 campaign (22 July 2004) – THALES Mobile Mapper 50 m 25m
 – THALES Mobile Mapper 50 m 25m")
35
Conclusions The performed tests show that GPS positioning with the use of ESTB correction gives very promising results. Even better than expected. The horizontal positioning of moving vehicles with errors around 1-2 meters would be satisfactory for the majority of users of the satellite navigation systems.

36
Conclusions Slightly lower accuracy was achieved for vertical coordinate. However the average error of around 3-4 meters without fully operating EGNOS system gives good prognoses for the future. Some disruptions of ESTB performance were observed giving false results of positioning, therfore Full Operational Capability (FOC) status of the EGNOS system is essential for user. Untill this time ESTB should be used with care.
 status of the EGNOS system is essential for user. Untill this time ESTB should be used with care..")
37
Thank you for your attention

Similar presentations











 & Geographic Information Systems (GIS) RESOURCE INVENTORY Soil Survey National Resources Inventory (NRI) Wetlands.>")





 work>")


