Download presentation
Presentation is loading. Please wait.

1
Final Presentation

3
Software / hardware combination Implement Microsoft Robotics Studio Lego NXT Platform Flexible Platform

4
Purchase and configure the Lego Mindstorms NXT platform to include design and construction of the robot and testing the sensors/servos. Install MSRS and Microsoft Visual Studio or Microsoft Visual C# Develop UI for manual control Develop autonomous operation Integrate mapping sensor data (distance to nearest object and touch sensor being pressed) to provide visual representation of the sensor data to be used in the manual control interface, and to enhance autonomous operation by using stored mapping data.
 to provide visual representation of the sensor data to be used in the manual control interface, and to enhance autonomous operation by using stored mapping data..")
6
Sensors, motors, “brick” Communication link

7
Microsoft Robotics Studio Microsoft Visual Studio 2008 Windows XP Verbose Text to Speech

9
Handling obstacles Fluid, normal speed, reaction time Understanding Lego NXT Capabilities / Limitations Autonomous Operation Algorithm

10
Ultrasonic sensor Provides “vision” for robot using sonar Has 30 degree field of vision Will turn even though it appears to be clear -30 degrees +30 degrees 24 inches opening Robot width 6 inches Distance to robot 15 inches: Threshold met, make a turn

11
Limited by the parts in the Lego NXT Kit Limited to flat surfaces Only one touch sensor Ultrasonic not laser vision Program parameters static, environment is dynamic ▪ Example, carpet vs. hard floor = $820,000,000 $820,000,000 $300 $300

12
Challenge due to concurrency, orchestration of sensors/actuators Example: Touch sensor pressed ▪ Action required, reverse ▪ If reverse touch sensor now false ▪ Must capture state Automation Algorithm Move forward while distance >40cm && Touch = False If Touch = true reverse If Distance <40cm turn left ▪ If Distance is still <40cm turn right ▪ If Distance is still < 40cm reverse in an arch

13
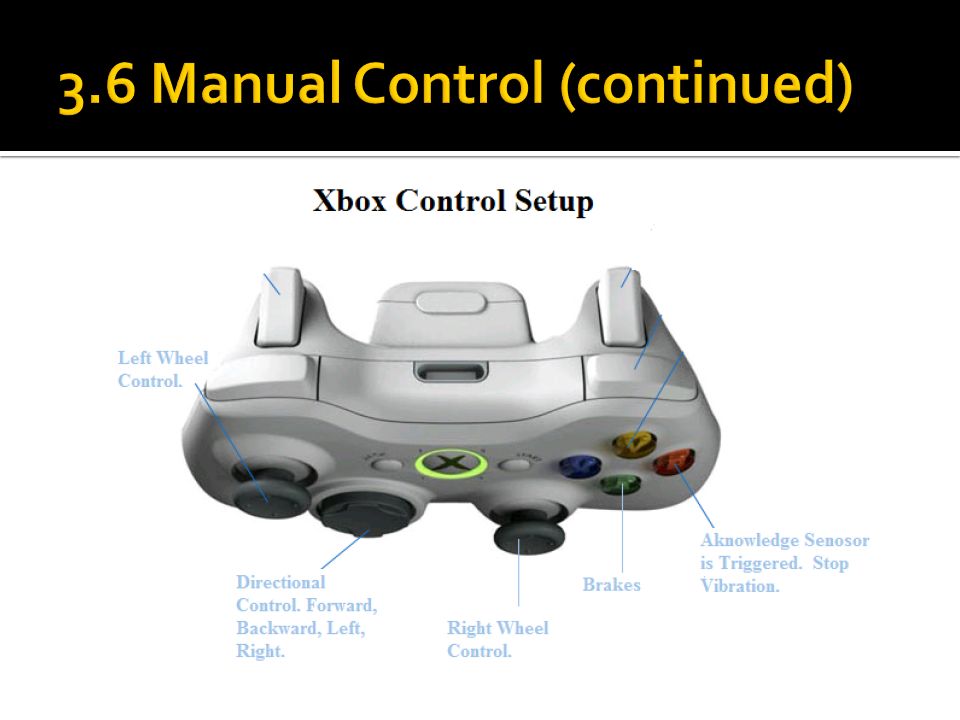
Expectations Why choose XBOX Controller? Features

16
Robot Communication DSS Commands Orchestration, logic analysis

17
Programs are compiled Sent to brick unit streamed in real time, link must exist Bluetooth Protocol

Similar presentations











 Conan Jen (EE) Andrew Lok (EE) Jonathan Tang (EE)>")







 sense of touch and the robotic.>")


 Objectives: 1.Extend the Lego robot with three sensors. 2.Program.>")
 Formatting by Shannon Sieber.>")
![[Low-level] Programming of NXT Robots Pavel Petrovič Department of Applied Informatics, Faculty of Mathematics, Physics and Informatics](/24/6974854/big_thumb.jpg "[Low-level] Programming of NXT Robots Pavel Petrovič Department of Applied Informatics, Faculty of Mathematics, Physics and Informatics>")