Download presentation
Presentation is loading. Please wait.

1
Legged Robot Locomotion Control Legged Robot Locomotion Control CPG-and-reflex based Control of Locomotion

39
CPG-and-reflex based Control of Locomotion Legged Robot Locomotion Control CPG-and-reflex based Control of Locomotion

56
The salamander model The strength: We need not have knowledge of the biology to define a fitness function that gives rise to efficient and robust locomotion. A fitness function that rewards fast forward motion might suffice. The weakness: If we wanted to model a real salamander, we are in for a disappointment. The neural network that evolved bares little resemblance to the biological one.

57
What does it do? The salamander can: Walk Swim Switch between walking & swimming across a border Switch to swimming if it falls into the water Follow targets, turn, modulate speed, and more...

58
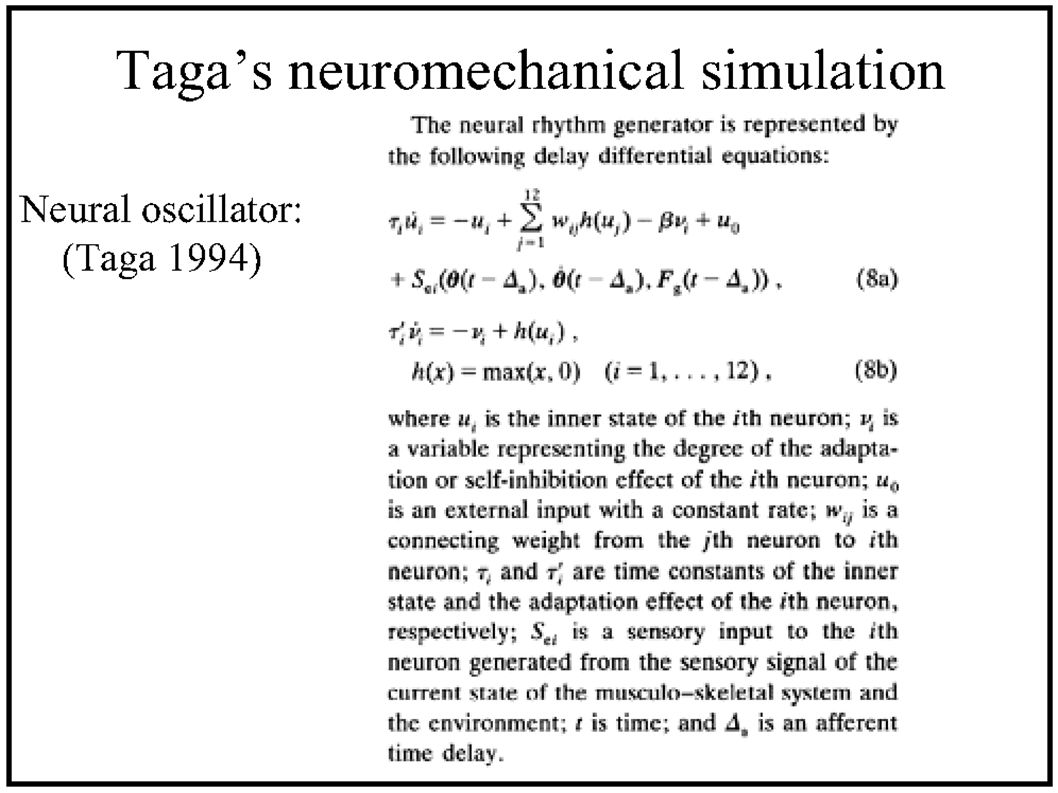
Biological motor behaviour Central Pattern Generating Neural Networks (CPGs): Small, relatively simple neural systems with well-defined units, well-defined circuitry, and well-defined function Such central pattern generators are believed to be responsible for practically all known muscle behaviour. Brain control Central Pattern Generators Muscles

59
CPG Motor Schema In “simple” motor systems (insects, molluscs, crustacea), central pattern generators have identical architectures in all animals of the same species. They are typically distributed throughout the body and form a distributed coordinated network of activity. They also receive high level instructions from the brain and feedback from the low-level muscles. In the salamander model, while its ‘high level’ its fitness function, is based on a simulation of CPGs and muscles.

Similar presentations








































































 Adrienne Moore 2-6-08.>")





