Download presentation
Presentation is loading. Please wait.

1
Chapter 9 Objectives Calculate the torque created by a force.
Define the center of mass of an object. Describe a technique for finding the center of mass of an irregularly shaped object. Describe the relationship between torque, angular acceleration, and rotational inertia.

2
Chapter 9 Vocabulary Terms
torque center of mass angular acceleration rotational inertia rotation Translation Center of rotation Rotational equilibrium lever arm center of gravity moment of inertia line of action Centripetal force Centrifugal Force

3
9.1 Torque Key Question: How does force create rotation?

4
9.1 Torque A torque is an action that causes objects to rotate.
Torque is not the same thing as force. For rotational motion, the torque is what is most directly related to the motion, not the force.

5
9.1 Torque Motion in which an entire object moves is called translation. Motion in which an object spins is called rotation. The point or line about which an object turns is its center of rotation. An object can rotate and translate.

6
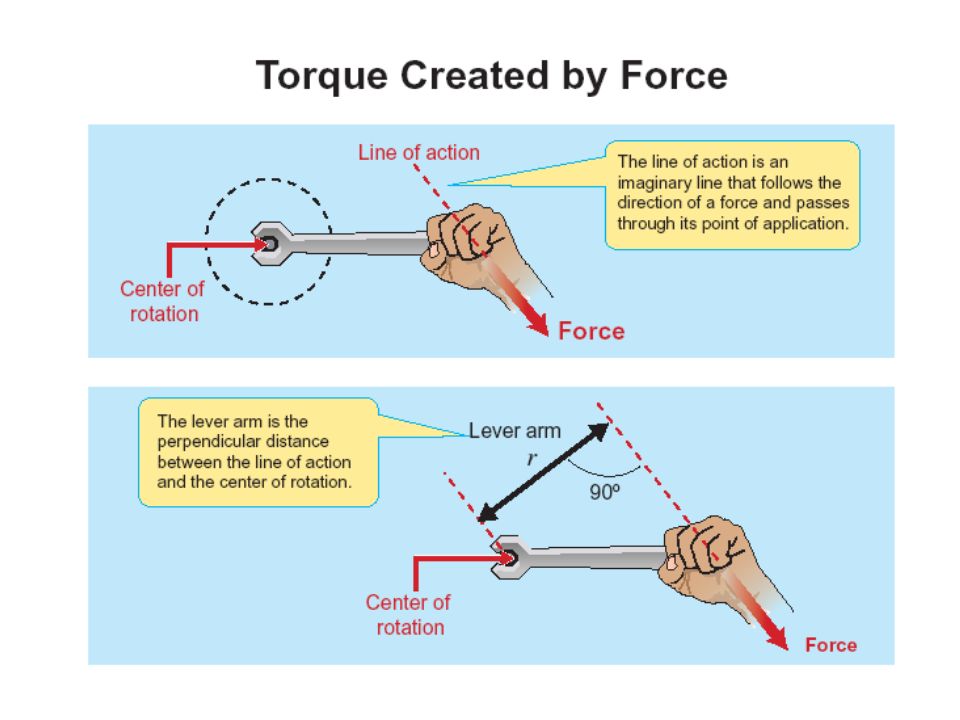
9.1 Torque Torque is created when the line of action of a force does not pass through the center of rotation. The line of action is an imaginary line that follows the direction of a force and passes though its point of application.

7
9.1 Torque To get the maximum torque, the force should be applied in a direction that creates the greatest lever arm. The lever arm is the perpendicular distance between the line of action of the force and the center of rotation

9
9.1 Torque Lever arm length (m) t = r x F Torque (N.m) Force (N)
 t = r x F Torque (N.m) Force (N)")
10
9.1 Calculate a torque A force of 50 newtons is applied to a wrench that is 30 centimeters long. 1) You are asked to find the torque. 2) You are given the force and lever arm. 3) The formula that applies is τ = rF. 4) Solve: τ = (-50 N)(0.3 m) = -15 N.m Calculate the torque if the force is applied perpendicular to the wrench so the lever arm is 30 cm.
 You are given the force and lever arm. 3) The formula that applies is τ = rF. 4) Solve: τ = (-50 N)(0.3 m) = -15 N.m. Calculate the torque if the force is applied perpendicular to the wrench so the lever arm is 30 cm.")
11
9.1 Rotational Equilibrium
When an object is in rotational equilibrium, the net torque applied to it is zero. Rotational equilibrium is often used to determine unknown forces.

12
9.1 When the force and lever arm are NOT perpendicular

13
9.2 Center of Mass Key Question: How do objects balance?

14
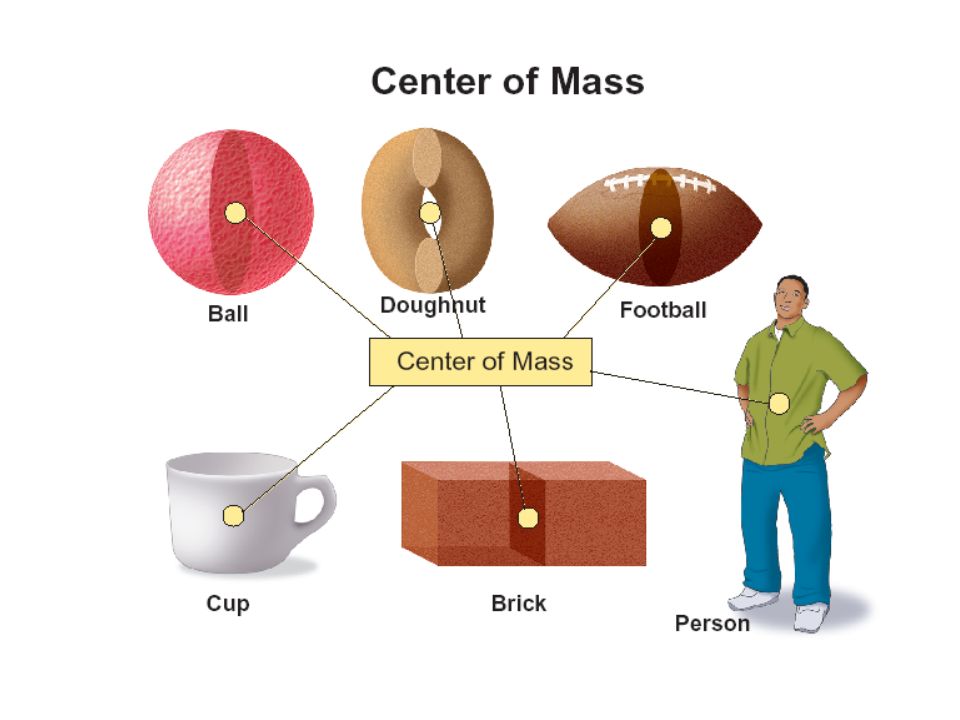
9.2 Center of Mass There are three different axes about which an object will naturally spin. The point at which the three axes intersect is called the center of mass.

15
9.2 Finding the center of mass
If an object is irregularly shaped, the center of mass can be found by spinning the object and finding the intersection of the three spin axes. There is not always material at an object’s center of mass.

17
9.2 Finding the center of gravity
The center of gravity of an irregularly shaped object can be found by suspending it from two or more points. For very tall objects, such as skyscrapers, the acceleration due to gravity may be slightly different at points throughout the object.

18
9.2 Balance and center of mass
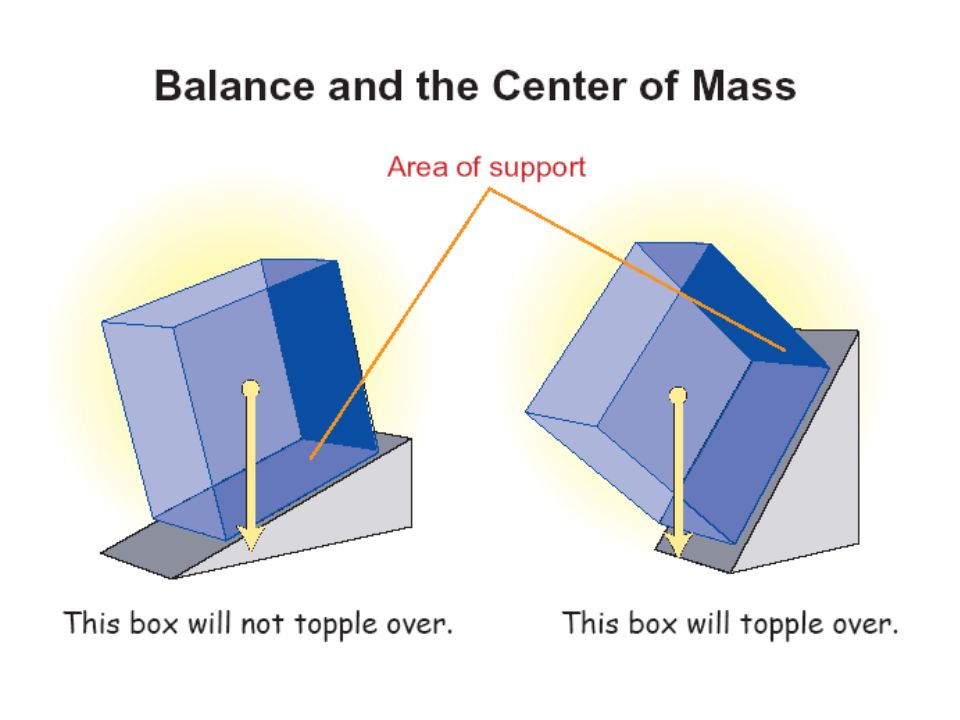
For an object to remain upright, its center of gravity must be above its area of support. The area of support includes the entire region surrounded by the actual supports. An object will topple over if its center of mass is not above its area of support.

20
9.3 Rotational Inertia Key Question:
Does mass resist rotation the way it resists acceleration?

21
9.3 Rotational Inertia Inertia is the name for an object’s resistance to a change in its motion (or lack of motion). Rotational inertia is the term used to describe an object’s resistance to a change in its rotational motion. An object’s rotational inertia depends not only on the total mass, but also on the way mass is distributed.

22
9.3 Linear and Angular Acceleration
Angular acceleration (kg) Linear acceleration (m/sec2) a = a r Radius of motion (m)
 Linear. acceleration. (m/sec2) a = a r. Radius of motion. (m)")
23
9.3 Rotational Inertia To put the equation into rotational motion variables, the force is replaced by the torque about the center of rotation. The linear acceleration is replaced by the angular acceleration.

24
9.3 Rotational Inertia A rotating mass on a rod can be described with variables from linear or rotational motion.

25
9.3 Rotational Inertia The product of mass × radius squared (mr2) is the rotational inertia for a point mass where r is measured from the axis of rotation.
 is the rotational inertia for a point mass where r is measured from the axis of rotation.")
26
9.3 Moment of Inertia The sum of mr2 for all the particles of mass in a solid is called the moment of inertia (I). A solid object contains mass distributed at different distances from the center of rotation. Because rotational inertia depends on the square of the radius, the distribution of mass makes a big difference for solid objects.

27
9.3 Moment of Inertia The moment of inertia of some simple shapes rotated around axes that pass through their centers.

28
9.3 Rotation and Newton's 2nd Law
If you apply a torque to a wheel, it will spin in the direction of the torque. The greater the torque, the greater the angular acceleration.

29
Application: Bicycle Physics

31
Centripetal Force v Fc

32
Centripetal Force Is the force that holds an object in an orbit
Not the same as “centrifugal force” Made up-force The outwards pull a rotating object feels

33
Simulated Gravity R

Similar presentations





 causes angular acceleration. Torque = (force) x (moment arm) Moment arm is the perpendicular distance between the axis.>")








 2.If an object rotates at 0.5 Hz. What is the.>")




