Download presentation
Presentation is loading. Please wait.

1
INTERFACING WEB SERVER WITH A ROBOT

2
The ESP8266 is a MICROCONTROLLER from Chinese manufacturer ESPRESSIF that includes Wi-Fi capability. It comes with an inbuilt firmware which supports serial interface and can be controlled using AT commands. In short the ESP8266 module is a “serial to wireless internet” device.

3
FEATURES: 802.11 b/g/n protocol Wi-Fi direct (P2P), soft-AP
Integrated TCP/IP protocol stack Supports antenna diversity Power down leakage current of < 10uA

4
Why esp8266?

5
HARDWARE CONNECTIONS The ESP8266 requires 3.3V power–do not power it with 5 volts! The ESP8266 needs to communicate via serial at 3.3V and does not have 5V tolerant inputs, so you need level conversion to communicate with a 5V microcontroller like most Arduinos use. When power is applied the red power light turns on and the blue serial indicator flickers frequently

6
block diagram

7
PIN CONFIGURATION

8
VCC AND GROUND CONNECTIONS
The outer hub of the breadboard is Vcc and the inner hub is GND

9
LM 7805 PIN CONFIGURATION

10
Lm 7805 connections LM 7805 is a 5V voltage regulator which reduces any voltage below 32V to 5V

11
L293D PIN CONFIGURATION

12
L293D CONNECTIONS Place L293D in such a way that the notch is facing towards the right Giving 5V to Vss makes the robot move slow when compared to giving it 8V( in our case we have given 5V) Pins 1,8,9,16 are connected to Vcc of the breadboard Pins 4,5,12,13 are connected to GND of the breadboard
 Pins 1,8,9,16 are connected to Vcc of the breadboard. Pins 4,5,12,13 are connected to GND of the breadboard.")
14
Arduino atmega 16 pin configuration

15
Arduino atmega16 connections
Pin 9 of the Arduino is given to Vcc and pin 10 to the GND of the breadboard Place the Arduino such that its notch is facing the notch of L293D

17
INTERFACING L293D WITH ARDUINO
Connect the pins 0 and 1 of the Arduino to the pins 15 and 10 of the L293D Connect the pins 24 and 25 of Arduino to the pins 2 and 7 of L293D

19
Motor connections Connect the left motor pins to the pins 11 and 14 of L293D Connect the right motor pins to the pins 3 and 6 of L293D

20
ir Sensor connections Connect the left, centre and right sensors to pins 26,27and 28 of the Arduino respectively

21
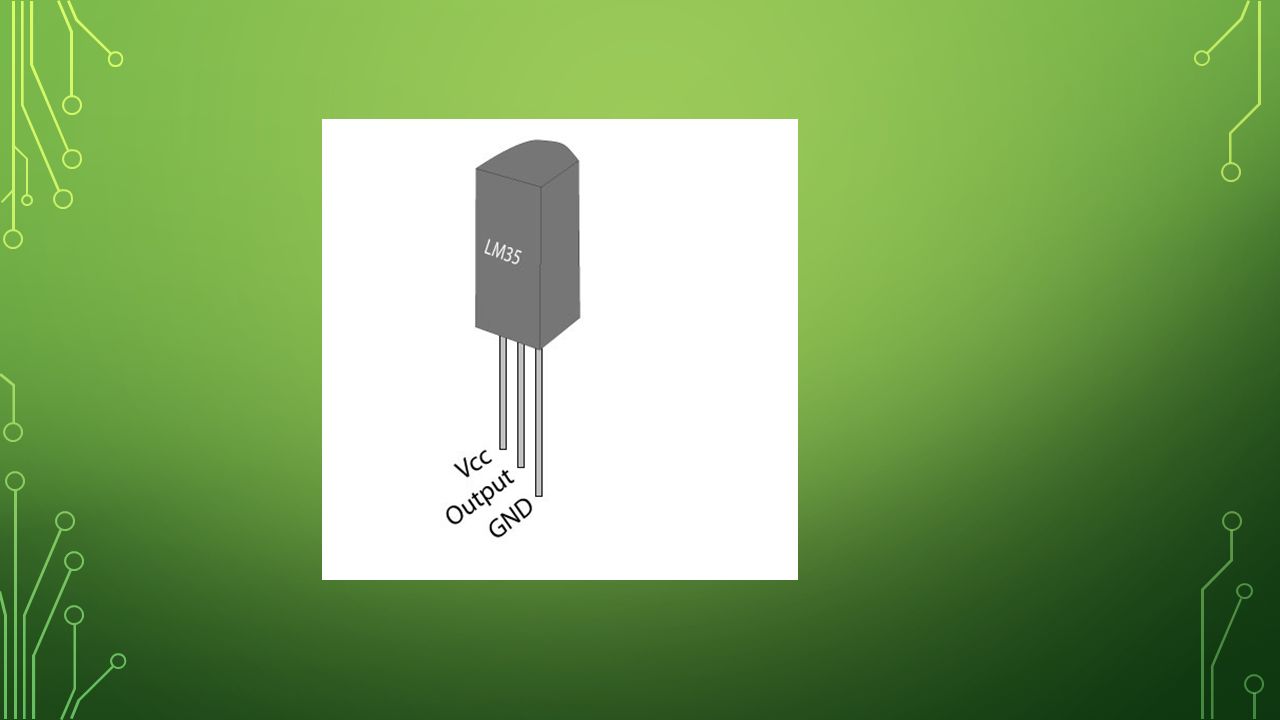
LM 35 PIN CONFIGURATION LM35 is a temperature sensor
Connect the Vcc and GND to the breadboard and output pin to the 29th pin of the Arduino The LM35 gives analog output so we have connect it to the analog pin of the Arduino

23
CREATING A SERVER using esp8266

24
STEPS TO CONNECT THE ESP8266 Wi-Fi MODULE
The Vcc (3.3V) of the ESP8266 is given to Vcc of the breadboard.(The 8V of the breadboard is reduced to 3.3V by means of a voltage regulator) The Tx and Rx pins of the ESP8266 is connected to the Rx and Tx pins of the Arduino The GND pin of the ESP8266 is given to the GND of the breadboard The RESET pin of ESP8266 should be connected to 3.3V CHPD pin should be given to 3.3V
 of the ESP8266 is given to Vcc of the breadboard.(The 8V of the breadboard is reduced to 3.3V by means of a voltage regulator) The Tx and Rx pins of the ESP8266 is connected to the Rx and Tx pins of the Arduino. The GND pin of the ESP8266 is given to the GND of the breadboard. The RESET pin of ESP8266 should be connected to 3.3V. CHPD pin should be given to 3.3V.")
25
The ESP8266 can be wired and can be programmed by using the AT commands. The wiring connections are shown

26
AT COMMANDS ESP8266, in it’s default configuration, boots up into serial modem mode. In this mode you can communicate with it using a set of AT commands. A set of AT commands used in this project is explained

27
Connect to the Wi-Fi network of the module
Connect to the Wi-Fi network of the module. In our case it is AI-THINKER_FBB24A

28
The AT command is used to check if the system and Wi-Fi module are working correctly

29
The AT+RST command is used to reset the module

30
The AT+GMR command is used to know about the current firmware version

31
The AT+CIFSR command is used to return the local ip address (192. 168

32
The AT+CWMODE command is used to enable both client and server

33
the AT+CIPMUX command is used to enable multiple connections

34
The AT+CIPSERVER command is used to create a server

35
The AT+SIPSEND command is used to send messages

36
The message is displayed on the webpage

37
Thus the following AT commands used in programming the ESP8266 Wi-Fi module can be understood better by a table format. The following AT commands used for this project are shown.

38
algorithm Void setup() { initialize input and output pins;
reset ESP8266; set mode as 3; enable multiple connections; enable server; }

39
Void loop() { wait for GET request; Check for obstacles; Do the necessary actions; Measure temperature using LM35; send message to the server using AT+SIPSEND command; }
 { wait for GET request; Check for obstacles; Do the necessary actions; Measure temperature using LM35; send message to the server using AT+SIPSEND command; }")
40
Add \r \n to the command inside Serial
Add \r \n to the command inside Serial.write in order to send command to the Wi-Fi module \r \n denotes carriage return(enter) For example to send the command “AT” use the command Serial.write (“AT\r\n”)
 For example to send the command AT use the command Serial.write ( AT\r\n )")
Similar presentations















 with Arduino Duemilanove>")





>")
