Download presentation
Presentation is loading. Please wait.

1
Servo Motor Control Demonstration

2
EML 2023 Department of Mechanical and Aerospace Engineering motor with gear reducer flex coupling incremental optical encoder limit switchhoming switch

3
computer controls the current going to the motor Closed-Loop Control desired steering angle compared to current steering angle motor gear reducer gear reducer and flex couplings (if needed) connect motor to steering shaft incremental optical encoder (with homing switch to initialize position) feeds back current motor position How does the computer do this? How does the computer ‘read’ the encoder information?

4
EML 2023 Department of Mechanical and Aerospace Engineering Computer Interface To command the motor: –The computer must be able to generate an analog voltage signal that is somehow interpreted by the motor. To ‘read’ the encoder: –The computer must be able to read the +5V and 0V pulses coming from the two light detectors on the optical encoder.

5
EML 2023 Department of Mechanical and Aerospace Engineering Interface to Computer We will use a National Instruments USB-6009 data acquisition (DAQ) device specs –USB interface to PC –8 channels of analog input, 0-5V –2 channels of analog output 0-5V 5 mA each –12 channels of digital input/outputs 0 or 5V, (8.5 mA for outputs) –1 counter
 device specs –USB interface to PC –8 channels of analog input, 0-5V –2 channels of analog output 0-5V 5 mA each –12 channels of digital input/outputs 0 or 5V, (8.5 mA for outputs) –1 counter")
6
EML 2023 Department of Mechanical and Aerospace Engineering NI USB-6009

7
EML 2023 Department of Mechanical and Aerospace Engineering Interface to Computer

8
EML 2023 Department of Mechanical and Aerospace Engineering cost:$41.67 Honeywell / Clarostat 600128CN1 Allied Electronics part # 753-0059

9
EML 2023 Department of Mechanical and Aerospace Engineering Computer Interface Let’s start with digital inputs to interface to the optical encoder. notice that there are four wires

11
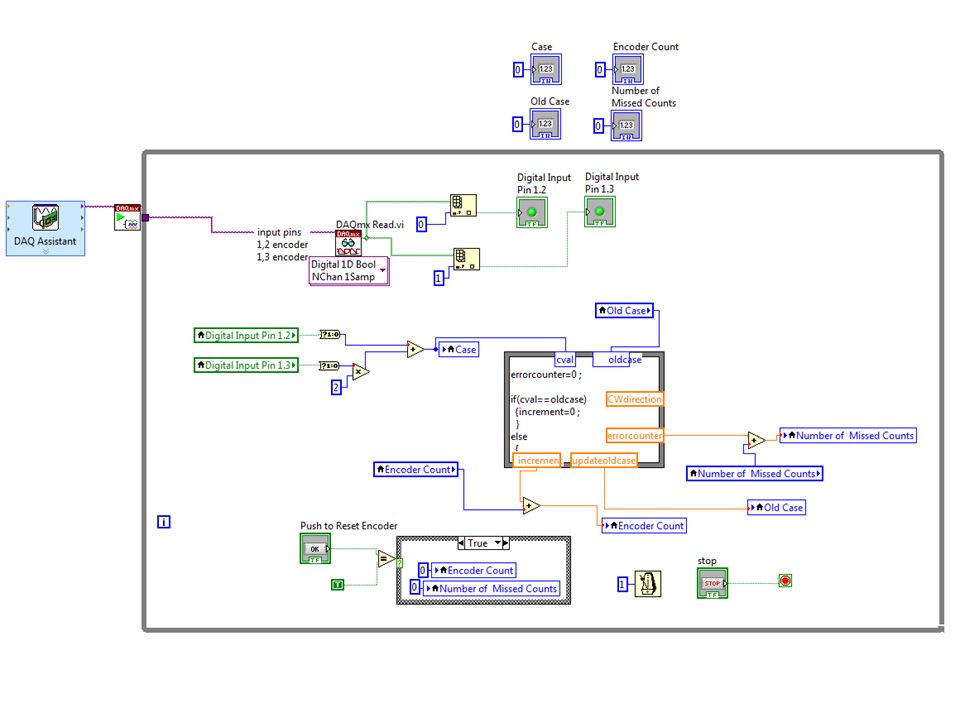
+5V power ground channel A channel B channels A & B will be either 0V or 5V depending on whether that light detector detects light through a slit or not

12
+5V power ground channel A channel B

13
EML 2023 Department of Mechanical and Aerospace Engineering Encoder Demo Program

15
computer controls the current going to the motor Closed-Loop Control desired steering angle compared to current steering angle motor gear reducer gear reducer and flex couplings (if needed) connect motor to steering shaft incremental optical encoder (with homing switch to initialize position) feeds back current motor position How does the computer do this?
 connect motor to steering shaft incremental optical encoder (with homing switch to initialize position) feeds back current motor position How does the computer do this")
16
EML 2023 Department of Mechanical and Aerospace Engineering Computer Interface to Motor To control the motor: –the computer must be able to generate an analog voltage signal –however, the typical analog voltage signal that a computer generates does not have sufficient current to power the motor –an amplifier is used a power supply provides 24V (7.5 amp max for our case) to the amp the computer generates an analog voltage in the range of -0 to +5V; 0V means the motor is to stop ; +5V means the motor is to turn at a maximum speed a digital signal will give the desired direction (0 V, CCW, 5 V CW)
 to the amp the computer generates an analog voltage in the range of -0 to +5V; 0V means the motor is to stop ; +5V means the motor is to turn at a maximum speed a digital signal will give the desired direction (0 V, CCW, 5 V CW)")
17
EML 2023 Department of Mechanical and Aerospace Engineering Interface to Computer

20
from 24V power supply to motor emergency stop

21
EML 2023 Department of Mechanical and Aerospace Engineering Issue with USB-6009 & Amp The analog command signal to the amp must be from -5V to +5V. A negative voltage causes the motor to turn in the opposite direction. The USB DAQ can only output from 0 to +5V. How can we reverse the direction of the motor?

22
EML 2023 Department of Mechanical and Aerospace Engineering from 24V power supply to motor emergency stop When we want the motor to go in the other direction, switch these two wires.

23
EML 2023 Department of Mechanical and Aerospace Engineering Change motor direction To go CW, set this digital output pin to TRUE (+5V). To go CCW, set this digital output pin to FALSE (0V).
..")
24
EML 2023 Department of Mechanical and Aerospace Engineering Interface to Computer

25
EML 2023 Department of Mechanical and Aerospace Engineering Interface to Computer

26
EML 2023 Department of Mechanical and Aerospace Engineering Homing Switch to input pin on USB DAQ +5V 0V

27
EML 2023 Department of Mechanical and Aerospace Engineering Interface to Computer 0V from USB-6009 +5V from USB-6009

28
computer controls the current going to the motor desired steering angle compared to current steering angle gear reducer and flex couplings (if needed) connect motor to steering shaft incremental optical encoder (with homing switch to initialize position) feeds back current motor position USB connection analog signal 2 digital signals USB connection digital signal digital signal input power homing switch E stop switch
 connect motor to steering shaft incremental optical encoder (with homing switch to initialize position) feeds back current motor position USB connection analog signal 2 digital signals USB connection digital signal digital signal input power homing switch E stop switch")
30
EML 2023 Department of Mechanical and Aerospace Engineering Design Project If you decide to use a servo motor in your design: –include an optical encoder for motor position feedback –include a homing switch to initialize your position –include E-stop switches as needed

31
EML 2023 Department of Mechanical and Aerospace Engineering

32
EML 2023 Department of Mechanical and Aerospace Engineering

33
EML 2023 Department of Mechanical and Aerospace Engineering

34
EML 2023 Department of Mechanical and Aerospace Engineering

Similar presentations