Download presentation
Presentation is loading. Please wait.

1
788.11J Presentation “Multi-AUV Control” Presented By Mukundan Sridharan

2
The Main Idea Cooperative control of multiple Autonomous Underwater Vehicle (AUV), using VBAP VBAP: Virtual Body and Artificial Potentials –Adaptable formation Control, based on sensor feedback –Design in 3D space –Bounded Error –Design dynamics for the VB, like rotation, dilation.
, using VBAP VBAP: Virtual Body and Artificial Potentials –Adaptable formation Control, based on sensor feedback –Design in 3D space –Bounded Error –Design dynamics for the VB, like rotation, dilation.")
3
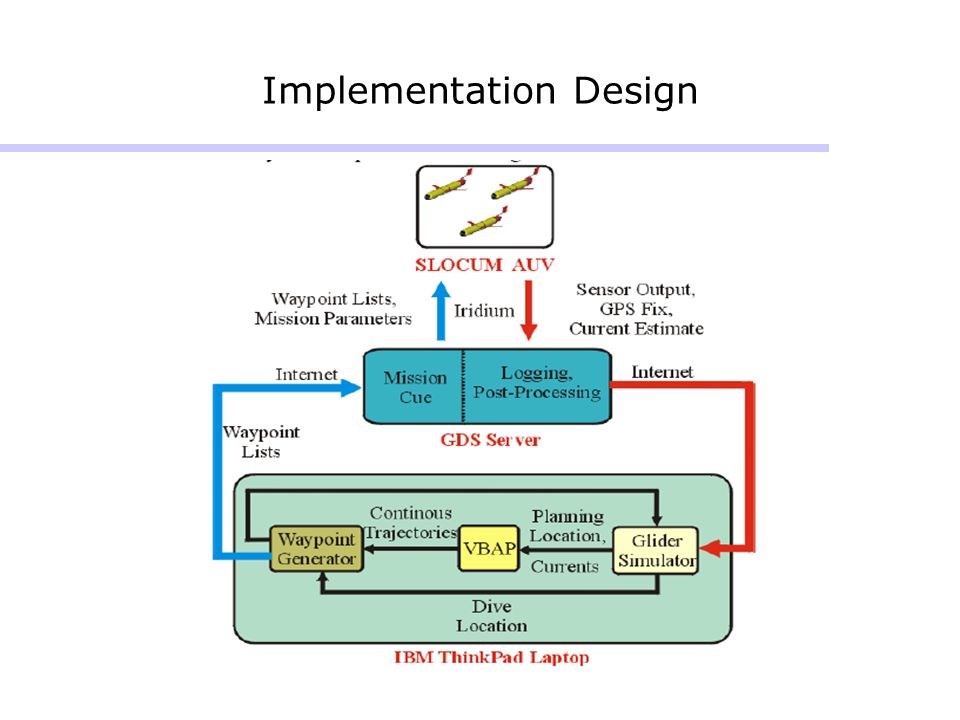
The Main Achievements and Contribution Making it work VBAP Algorithm Glider Simulator Implementation Design

5
The Challenges Underwater Communication (?) The unpredictable external water currents – By considering the previous current measurements when calculating new mission paths. Latency: – The GPS location is one cycle old – The current estimate is two cycle old.

6
A Slocum Glider developed by Webb Research Corporation

7
Results

8
Centroid Error

9
Innovation The design of the glider –Buoyancy engine –No external thrust Satellite based Communication

10
Reference Multi-AUV Control and Adaptive Sampling in Monterey Bay.Multi-AUV Control and Adaptive Sampling in Monterey Bay

Similar presentations